

机器人视觉抓取问题分析
描述
最近视觉抓件系统一直会出现抓取零件不到位的问题.下面我将分析一下问题出现的原应.
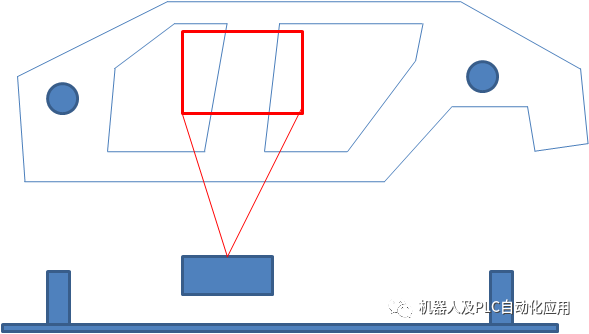
单相机测点,测量车身侧围外板B /内板B,计算出的车身整体偏差值是B柱的旋转和变化量.因此对于车身整体的变化量存在偏差.零件大的组装件容易出现这种问题.因此要区分对待侧围内板和侧围外部的抓取视觉的计算方法.
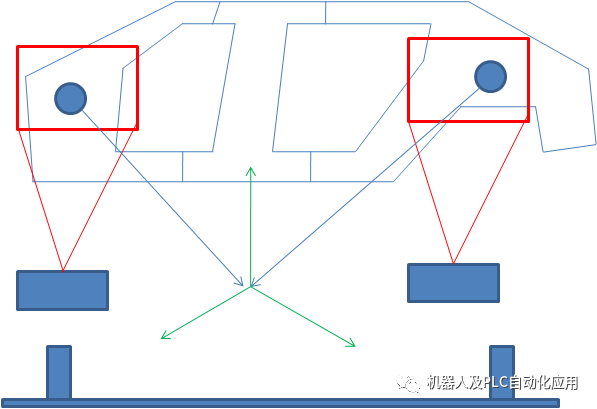
1.车身侧围内板:
应设置两个相机对应机器人抓手上的定位销附近,计算两个定位空的偏差值.由于机器人抓手是固定的所以,要计算出两空的变化对应车身坐标系的整体变化值.这样计算出的机器人BASE坐标系下的偏差值最准确,机器人的抓取效果最好。
如果机器人抓手不使用定位销定位,则可以使用一个相机的方法进行粗略抓取,问题会很少。
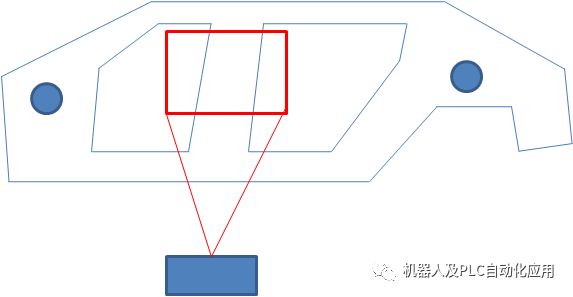
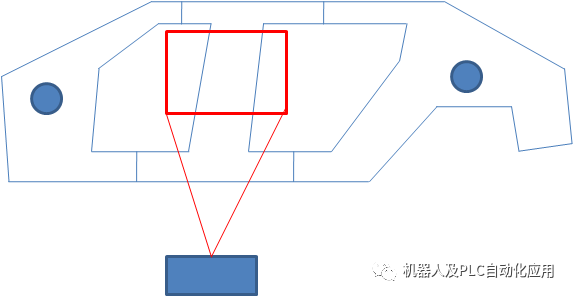
2.车身侧围外板:
侧围外板是一个整体件,用一个相机照车身B柱是没有问题的.整体大件由于不需要搭接工艺,因此可以使用一个相机和定位销定位抓取的方法.
--------------------END--------------------
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人视觉——机器人的“眼睛”2015-01-23 0
-
【mBot申请】视觉机器人2015-10-29 0
-
机器人与CCD2017-08-18 0
-
基于深度学习技术的智能机器人2018-05-31 0
-
机器人基础书籍2019-05-22 0
-
【MYD-CZU3EG开发板试用申请】基于机器视觉的工业机器人抓取工作站2019-09-18 0
-
【瑞芯微RK1808计算棒试用申请】基于机器视觉的工业机器人抓取工作站2019-09-18 0
-
服务机器人的视觉系统怎么设计?2020-04-07 0
-
四元数数控:工业机器人使用机器视觉系统的原因2021-04-29 0
-
工业机器人与视觉实训平台介绍2021-07-01 0
-
工业机器人与智能视觉系统应用实训平台介绍2021-07-01 0
-
ZN-1AI工业机器人与智能视觉系统应用实训平台介绍2021-07-01 0
-
工业机器人视觉装配实训平台实验2021-07-01 0
-
刚柔软机器人设计与仿真分析实例解析2021-09-02 0
-
基于视觉的机器人抓取系统设计2023-08-19 1178
全部0条评论

快来发表一下你的评论吧 !
