

KUKA大众标准--带基移位的搜索运行(相对子程序)
描述
带基移位的搜索运行(相对子程序)
标志 720 必须在宏 57 中打开
必须选择夹具 TCP (RobWzg) 的方向,以便要移除的组件在 X+ 中移动。容器的测量方式应使底座的 X+ 与搜索运动的方向相同(搜索运行中的 X+ RobWzg)。
使用基本移位搜索
4:LIN SUCHEN VB=500[mm/s] RobWzg=1 Base=1 Fern=Mxx Vred=5% Nah=Mxy P
1: FB PSPS = EIN
2: TECH1 Baseverschiebung Suchlauf Base 31 vorbesetzen Techaufruf=EIN
3: WARTE BIS E23
4: FB PSPS = E14 & E24 & E44 & E80 & M1 & M3
5: LIN VB=200[mm/s] VE=100% ACC=100% RobWzg=1 Base=31 SPSTrig=0[1/100s] P
1: FB PSPS = E14 & E24 & E44 & E80 & M1 & M3
Mxx 和 Mxy~ 远近传感器必须防断线!!!
F558 :
~ 正确的搜索运行选择
~ 必须手动设置,由 TECHPAKET 设置
~ 重新设置!!!
只有在搜索完成后机器人手控器上出现“Search new base was set”消息时,才能学习第 5 - 8 点!!!
寻找轨迹找到最后一个工件前面有件会自动校正轨迹向后
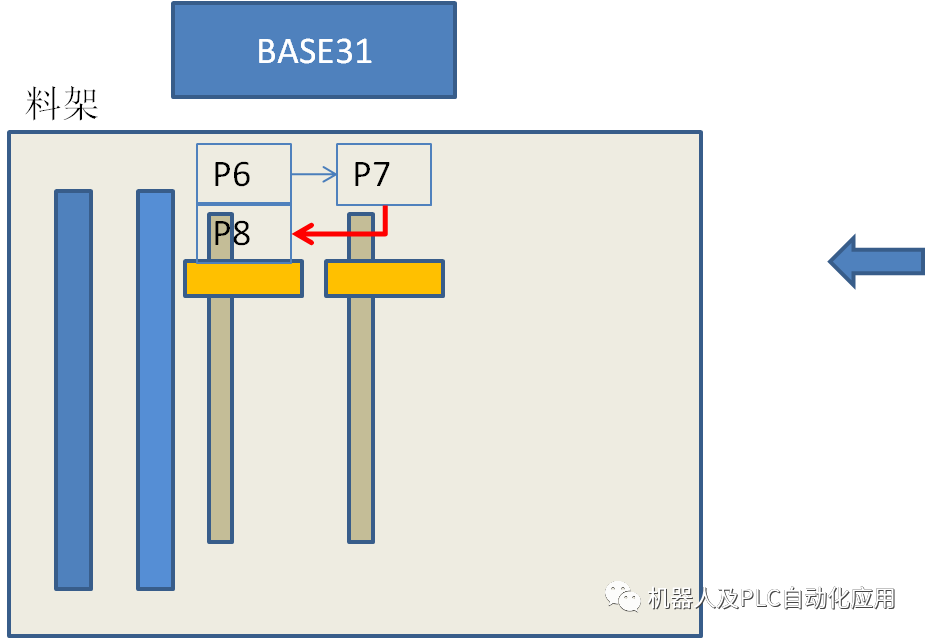
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P
P6---接触工件位置M29
LIN VB=700[mm/s] VE=0% ACC=100% RobWzg=20 Base=31 SPSTrig=5[1/100s]P
P7---返回测量位置
LIN VB=400[mm/s] VE=0% ACC=100% RobWzg=31 Base=31 SPSTrig=5[1/100s]P
P8---抓件
寻找轨迹程序的最远端
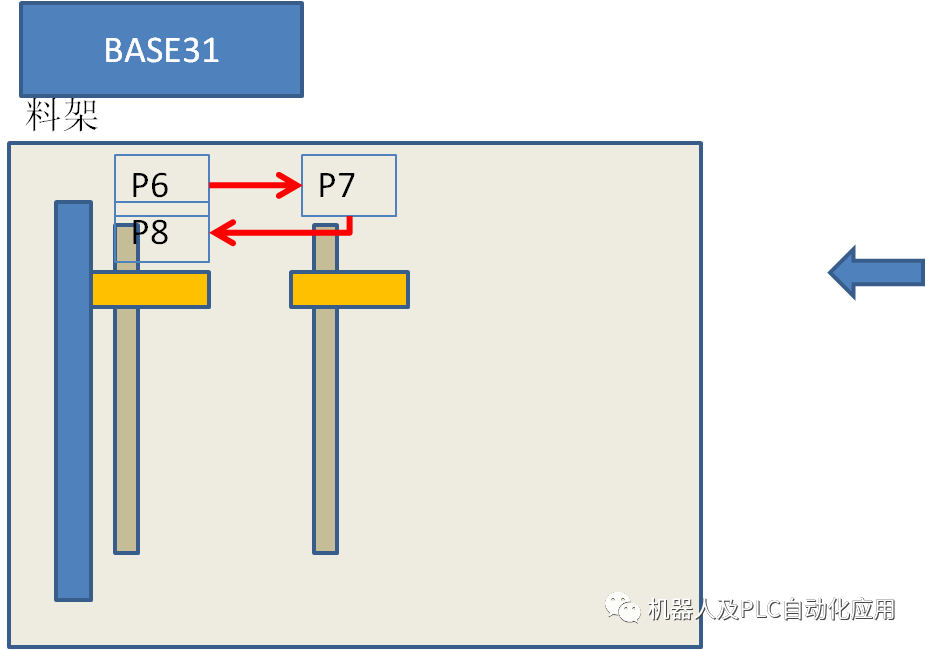
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P
P6---接触工件位置M29
LIN VB=700[mm/s] VE=0% ACC=100% RobWzg=20 Base=31 SPSTrig=5[1/100s]P
P7---返回测量位置
LIN VB=400[mm/s] VE=0% ACC=100% RobWzg=31 Base=31 SPSTrig=5[1/100s]P
P8---抓件
程序分析:
Tech_ BaseverschiebungSuchlauf Base 31 setzen - - -xyz-MaxWeg:- Nah
Name = Baseverschiebung ---基坐标转移
[P1]:
Visible = True
Enum=True
num1=Base 31 vorbesetzen BASE31预填充
num2=Sensor
num11=Suchlauf Base 31 setzen 设置搜索运行 Base 31
num20=VW_XYZ-Scan VW_XYZ 扫描
[P2]:
Visible = True
Enum=True
num1=Dehnfuge1_Korr_X(-) 伸缩缝1
num2=Dehnfuge1_Korr_Y(-)
num3=Dehnfuge1_Korr_Z(-)
num11=Dehnfuge1_Korr_X(+)
num12=Dehnfuge1_Korr_Y(+)
num13=Dehnfuge1_Korr_Z(+)
num21=xyz-Init 初始化
num22=xyz-Referenzfahrt 参考运行
num23=xyz-Messfahrt 测量运行
-------
CASE 11; 搜索成功后设置基数
CONTINUE
WHILE(VW_MPARA_ACT.BASE_NO<1)
MLD(18,#QuitMsg); 基数不正确
ENDWHILE
IF $FLAG[Fehler_Suchlauf]==TRUE THEN
MLD(16,#QuitMsg); 搜索运行出错
ENDIF
;设置基数 31 BASE_TYPE[..]=#BASE
IF(BASE_TYPE[VW_MPARA_ACT.BASE_NO]==#BASE)THEN
CONTINUE
$BASE=$NULLFRAME
$BASE=$pos_act
BASE_DATA[31]=$BASE
IF NOT $EXT THEN 在手动时会有提示,自动时没有
MeldNr(4) ;新基地已定
HALT
ENDIF
ENDIF
----------------------END----------------------
审核编辑 :李倩
-
无法控制子程序的运行2014-12-12 0
-
主界面点击按钮弹出子程序界面,设置完运行子程序,3个子程序都可以单独运行2016-03-28 0
-
单片机C语言之流水灯(带延时子程序)2021-07-15 0
-
如何实现带参数子程序的设计?2022-01-18 0
-
25045操作标准子程序2009-01-14 846
-
中断处理和子程序调用概念解析2017-11-16 9542
-
KUKA程序中"DEF "与" DEFFCT" 的区别2020-05-11 7835
-
KUKA机器人的”Dry run空转”概念2020-10-27 4105
-
提高PLC程序运行有什么方法2022-01-10 630
-
大众版KUKA程序的轨迹程序分解2022-07-08 2732
-
带参数子程序的参数传递过程2022-10-17 1954
-
KUKA机器人:将参数传递到子程序或函数中V1.28版2023-01-31 1621
-
KUKA大众标准与标准版机器人程序的不同2023-06-08 2257
-
一文详解PLC子程序与子程序指令2023-12-14 3002
全部0条评论

快来发表一下你的评论吧 !
