

如何利用ESP8266制作一个简单的四轴飞行器
描述
这个项目里我将向您展示如何使用ESP8266(12e)制作四轴飞行器,我们使用ESP8266作为飞行控制器。并且据说这架无人机可以爬墙,你是不是很震惊?开玩笑的,让我们继续往下看吧!
飞控
飞行控制器(FC)是四轴飞行器的大脑。它基本上是一个集成电路板,包括检测方向变化的传感器。它还接收用户命令并控制电机以使四轴飞行器保持在空中。市场上有许多飞行控制板。其中有些是开源的,有些不是。
Esp8266四轴飞行器的耗材
所需组件:
Esp8266
MPU6050加速/陀螺模块
有刷电机
螺旋桨
500mAhlipo3.7v
Si2302MOSFET(5x)
铅笔
无人机套件(可选)
使用的工具:
烙铁
飞控
如同我们知道大脑是如何工作的,我们就会知道如何处理它。在这里,您有飞行控制器(FC)的部件。
飞行控制器(FC)是四轴飞行器的大脑。它基本上是一个集成电路板,包括检测方向变化的传感器。它还接收用户命令并控制电机以使四轴飞行器保持在空中。
几乎所有的飞行控制器(FC)都包括基本的陀螺仪和加速度计(Gyro和Acc)传感器。一些FC可能包括更高级的传感器,例如气压计和磁力计(指南针)。
在这里,我使用ESP8266和MPU6050陀螺仪和加速度计(陀螺仪和加速度计)传感器制作了自己的飞行控制器。
ESP8266是什么?
基本上,ESP8266是一个Wi-Fi模块。它具有2.4GHzWi-Fi的能力,即802.11b/g/n。它支持WPA和WPA2。它是一个集成了32位处理器的片上系统,运行频率为80MHz(也可以超频至160MHz)。它有64KB的RAM和64KB的引导ROM。
为什么我们使用ESP8266?
ESP8266模块使微控制器能够连接到2.4GHzWi-Fi
ESP8266功能
ESP8266在物联网方面有很多应用。以下是该芯片的部分功能:
网络:模块的Wi-Fi天线使嵌入式设备能够连接到路由器并传输数据
数据处理:包括处理来自模拟和数字传感器的基本输入,以便使用RTOS或非OSSDK进行更复杂的计算
P2P连接:使用IoTP2P连接在ESP和其他设备之间创建直接通信
Web服务器:访问以HTML或开发语言编写的页面。
ESP8266作为一个微控制器:
低功耗、高度集成的Wi-Fi解决方案
最少7个外部组件
宽温度范围:-40°C至+125°C
ESP8285—8Mbit闪存嵌入
无线电发射器和接收器以及偏航、俯仰、滚动

无线电发射器向接收器发送信号,接收器接收到这个信号并根据来自发射器的命令进行操作。
无线电控制器通常由发射器和接收器组成,它们通常在不需要低功率发射器许可的无线电频率上运行。
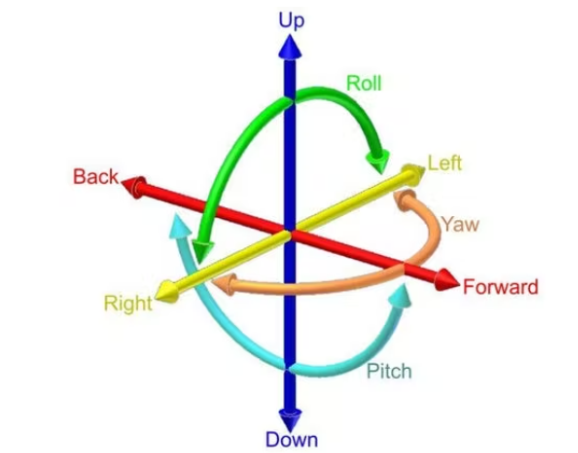
偏航、俯仰、滚动
无线电发射器向接收器发送信号。接收器接收到这个信号并根据来自发射器的命令进行操作。
无线电控制器通常由发射器和接收器组成,它们通常在不需要低功率发射器许可的无线电频率上运行
偏航、俯仰、滚动
在空中向左或向右移动您的无人机,实际上是“滚动”您的无人机。
向前或向后倾斜您的无人机。
顺时针或逆时针旋转你的无人机,让你在空中画圈或图案。
控制发送到无人机的电量,从而使无人机更快或更慢。
在空中向左或向右移动您的无人机,实际上是“滚动”您的无人机。
向前或向后倾斜您的无人机。
顺时针或逆时针旋转你的无人机,让你在空中画圈或图案。
控制发送到无人机的电量,从而使无人机更快或更慢。
原理图
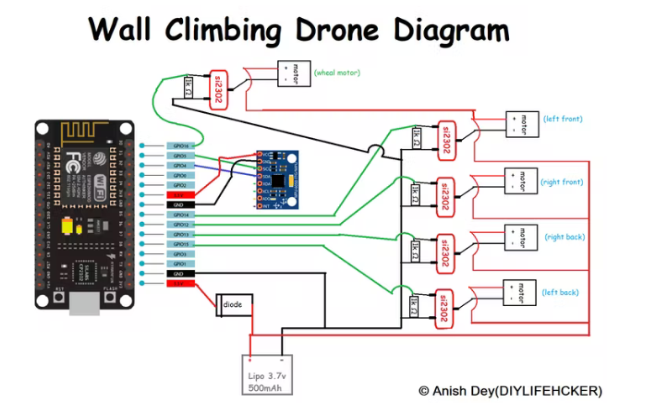
这是这个无人机的示意图
接线图非常简单
您必须按照原理图将MPU6050模块引脚与Esp8266引脚连接起来,示意图如上所示。
制作电路
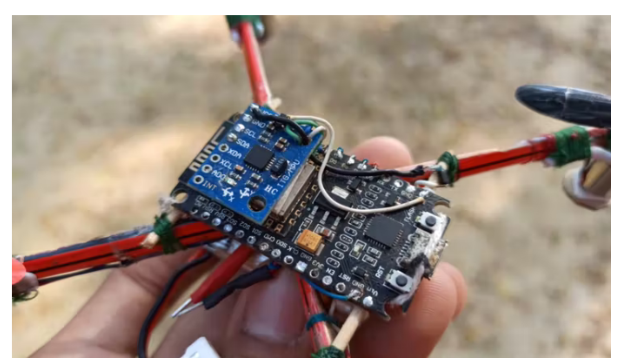
按照上图给出的示意图制作电路。
软件部分
如何安装Arduino桌面IDE?
在ArduinoSoftware下载ArduinoDesktopIDE
选择您的操作系统(Windows7、Windows10、Linux64位等)
单击“仅下载”并按照给出的说明进行操作
如果您没有管理员权限,请下载“用于非管理员安装的WindowsZIP文件”并将其解压缩到所需位置。
启动ArduinoDesktopIDE(如果它没有自动启动或者您没有找到ArduinoIDE快捷方式,请单击arduino.exe)
安装对ESP8266的支持
选择“文件-》首选项”
添加http://arduino.esp8266.com/stable/package_esp8266.。。到“AdditionalBoardsManagerURLs”
点击“确定”
安装ESP8266WiFi.h库
复制代码并将您自己的wifiSSID和密码放入代码中
转到“爬墙无人机”并下载代码。
更改ssid或通过:WiFi.begin(“Diyprojectslab”,“romeooo”);//Changessidandpassword
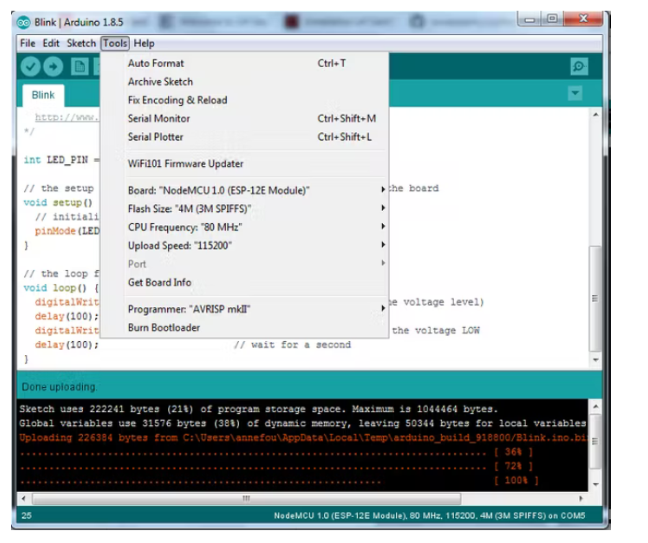
在ArduinoIDE中打开提供的草图
更新Esp826drone.ino文件中的WiFi凭据
将其上传到您的ESP8266
组装你的无人机

安装所有电机

发动机
两台电机顺时针旋转,两台电机逆时针旋转(见图),如果电机不向正确方向旋转,只需切换电机的极性
检查电池和电压
检查所有螺旋桨是否连接牢固
检查所有电机安装
检查所有电机安装
飞行后务必拔掉电池,只在飞行前几秒钟装上电池

接下来,您只需要
下载应用程序
并安装应用程序
启动你的ESP8266
连接到应用程序
现在,小心的把你的手指放在那两个操纵杆上
飞(成果)

最终如你所见,这是一个非常简单的飞行控制器。
-
关于四轴飞行器2013-02-24 0
-
半智能四轴飞行器设计2013-10-28 0
-
制作一个STM32的能飞行跟踪人脸识别四轴飞行器的难度多大2014-03-29 0
-
如何用stm32制作四轴飞行器2015-04-07 0
-
【专题分享】最新出炉的四轴飞行器专题2015-05-08 0
-
【MiCOKit申请】四轴飞行器的原理与制作2015-08-11 0
-
【云智易申请】四轴飞行器的原理与制作2015-08-11 0
-
【OK210申请】四轴飞行器的原理与制作2015-08-11 0
-
【蓝牙4.1申请】蓝牙控制的四轴飞行器2015-10-09 0
-
四轴飞行器的结构原理2016-01-15 0
-
【CANNON申请】四轴飞行器2016-01-26 0
-
转:四轴飞行器制作全过程2016-08-16 0
-
如何学习制作四轴飞行器2019-04-03 0
-
怎么设计一个简易的四轴飞行器系统2021-03-04 0
-
如何利用51单片机去制作一种微型四轴飞行器呢2021-12-20 0
全部0条评论

快来发表一下你的评论吧 !
