

巨磁电阻传感器概述以及三种应用模式
MEMS/传感技术
描述
电子发烧友网报道(文/李宁远)磁传感器在很多领域都有着重要作用,作为一类大家熟知的传感器类型,纵观磁传感器的发展,可以分为以下几个阶段,从霍尔效应的磁传感器,到各向异性磁阻效应的AMR磁传感器,到基于巨磁电阻的GMR磁传感器,再到基于隧道磁阻的TMR磁传感器。 巨磁阻效应是指磁性材料的电阻率在有外磁场作用时较之无外磁场作用时存在巨大变化的现象。
简单来说如果某种条件下物质在磁场中电阻率减小的幅度非常大,就称为巨磁阻效应。GMR传感一般也采用桥式构造,功耗、响应时间、温漂等传感指标和AMR传感较为相近,但是磁电阻比会比AMR大很多,其磁电阻比ΔR/Rmin一般在15%左右。GMR因为更高的技术门槛,比基于霍尔效应的磁传感以及基于各向异性磁阻效应的AMR磁传感更少见。
模拟输出式GMR角度传感应用角度传感一直是磁性传感器的重要应用方向,从低端到高端,从标准化到专用于汽车、工业和消费类,GMR在其中都有很好的应用场景。角度传感器通过使用单片集成磁阻元件测量正弦和余弦角分量来检测施加磁场的方向。GMR传感器非常适合具有宽角度范围的应用,例如无刷直流电机或转向传感器。经过预先校准,GMR传感可以立即使用,不同级别的信号处理集成使设计人员能够优化系统分区。
GMR角度传感器在高温下能否保持稳定是应用中常遇到一类问题,电机高温环境会导致磁石的磁场强度下降,从而导致传感器输出幅值下降。如果角度计算依靠幅值,幅值随温度变化而变化后,必然会影响角度精度。模拟输出式的GMR角度传感器可以计算通过振幅的比值Sin÷Cos来测算,那么即使高温下的传感器输出幅值下降,但是振幅的比值几乎不受温度影响,计算后的角度精度也不会受到影响。
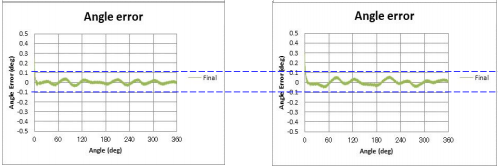
(角度精度不随温度变化,ALPSALPINE) 校正计算后的角度误差和温度变化带来的磁场强度变化无关,能够很好地适用于高温环境下的角度应用。 另一方面,高温兼强磁场工况可能会对器件产生额外的影响。强磁场在角度传感器的45deg方向施加压力,导致固定层的磁化方向产生反方向不可逆的变化,输出相位差变差导致角度精度变差。

(GMR,英飞凌) 上面说到,模拟输出式的GMR角度传感器正弦和余弦角度分量来检测磁场方向,深耕GMR技术的厂商会在模拟输出式GMR传感的在固定层上做强化设计,减少正余弦路的相位差,增强对磁场压力的耐受性,在发动机,电驱动系统附近等高温环境必须使用超强磁场的工作磁石情况下,可以明显增强对外部杂散磁场的容忍度。另外,模拟输出式传感器和磁石之间相对位置更自由,可以增加机械设计的灵活性。
开关式GMR检测
在高精度ON/OFF检测上,开关式GMR常与霍尔传感器来比较。我们以电子锁应用为例,比较二者在ON/OFF磁滞以及偏移位置最大偏差,GMR在ON/OFF磁滞上大致在0.15mm,霍尔传感器大概在0.5mm,偏移位置最大偏差相差得会更多一些,GMR在0.4mm左右,霍尔传感器则为3.7mm。 GMR传感器在开关式输出检测上,灵敏度偏差更小一些,即便工作磁石磁场的变化梯度很陡峭,GMR也能完成高精度的运动位置检测。同时,机械开关产生的触点故障在高精度ON/OFF检测中也总是为人诟病,GMR传感更远的检测距离能够用于设计非接触式开关,对于磨损和颤动导致的接触不良也能起到作用。
磁编码器式GMR的高速检测
在高速检测中,如果传感器输出响应速度慢,会导致50%占空比无法实现;50%占空比出现偏差,转速计算和旋转方向检测也会由于时序错配导致检测精度恶化。如果仅从传感器的层面考虑,GMR响应速度是足够的。 频率上即便到100KHz,GMR Encoder仍然可以保持50%占空比的输出。在常规的10KHz(4极磁石且转速为100krpm)中,GMR可以保留充足的响应速度余量。在高速旋转检测中,输出响应速度无疑有很好的表现。当然,在高速旋转检测中,也必须重点考虑信号处理芯片以及电子回路的响应速度。
小结
这三种GMR传感应用,开关式GMR因其检测距离远以及低磁滞带来的高精度,非常适合消费电子、白电等领域;编码器式GMR在各种恶劣环境下都能保持50%占空比以及90°的A/B相位差,在电机的高精度转速检测上效果突出;模拟输出式GMR则特别适用于高温强磁场场合,利于更灵活的机械设计。

-
磁电式传感器2009-03-17 0
-
巨磁电阻(GMR)角度传感器2012-08-02 0
-
Infineon基于巨磁电阻效应的iGMR传感器2018-10-25 0
-
热线式空气流量传感器的三种形式介绍2018-11-08 0
-
巨磁电阻传感器的结构和屏蔽作用2020-04-29 0
-
巨磁电阻效应是什么?2021-03-17 0
-
巨磁电阻效应与传感器2009-07-13 515
-
巨磁电阻传感器在磁场线性测量领域中的应用2014-01-25 5550
-
巨磁电阻结构组成特点_巨磁电阻的应用2018-05-11 20078
-
什么是巨磁电阻效应_巨磁电阻效应的应用介绍2018-05-11 30361
-
巨磁电阻磁传感器的结构和屏蔽作用介绍2019-09-09 5647
-
巨磁电阻传感器的基本原理2019-12-18 7989
-
巨磁阻传感的三种应用模式Sisyphus2022-06-27 2346
全部0条评论

快来发表一下你的评论吧 !
