

BLDC的无感控制方法
工业控制
描述
BLDC进行梯形波控制时,需要检测转子磁极位置,根据检测的位置定子线圈进行换相通电,形成6步的旋转磁场,进而带动转子同步转动的控制方式。而检测转子磁极位置又可分为电机带霍尔传感器(有感)以及不带霍尔传感器方法,检测转子磁极位置的方法不同,会直接BLDC控制模式不同。
BLDC有感控制
对于BLDC有感控制,要求BLDC电机本身装有霍尔传感器,电机霍尔传感器安装时需要相差120°,如下图所示
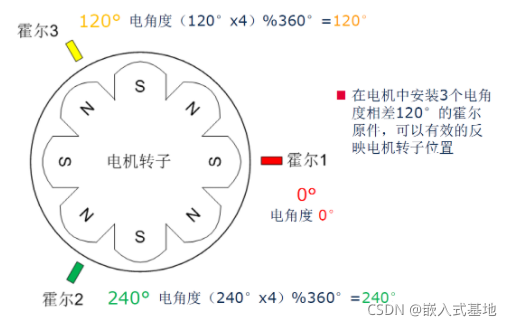
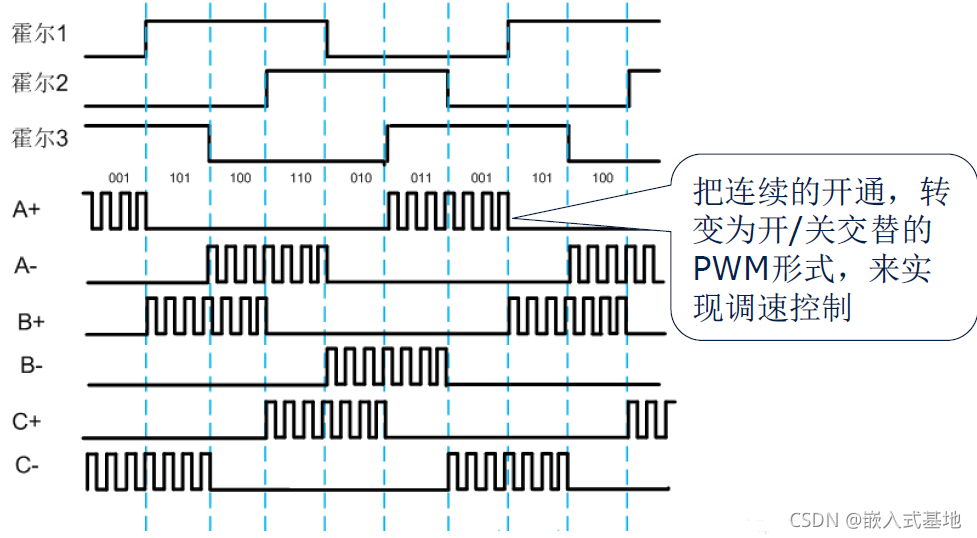
电机按一定方向转动时,3个霍尔的输出会按照6步的规律变化如下:
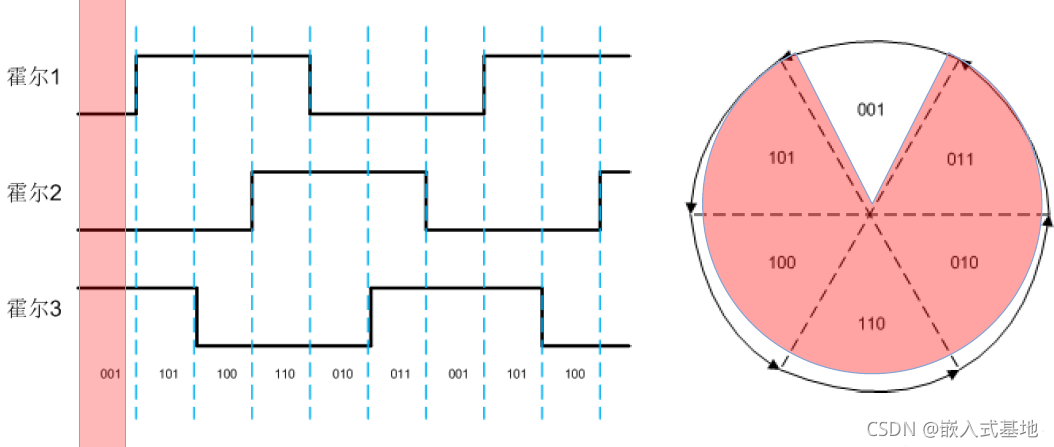
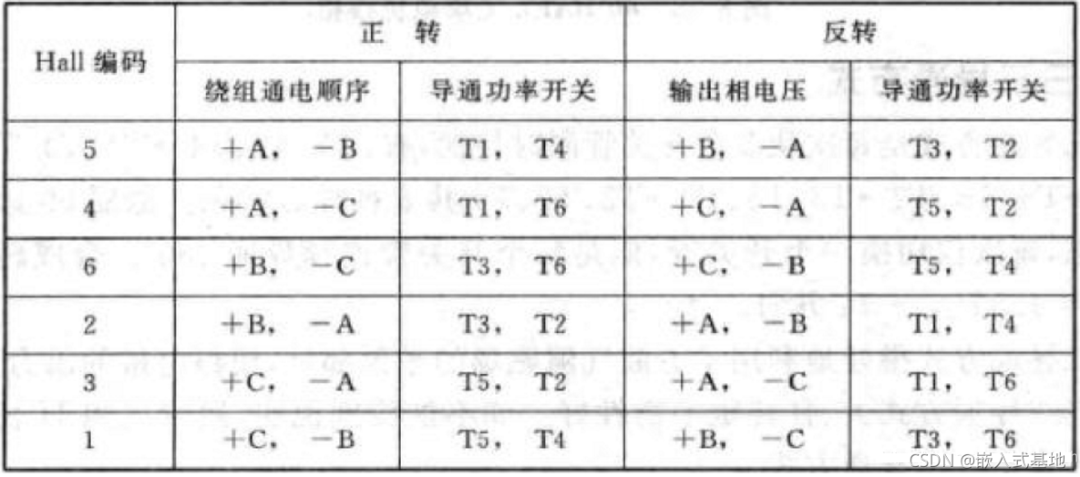
根据霍尔传感器位置,进而按照一定规律给三相绕组通电,从而来实现电机的控制。考虑到每个电机霍尔传感器安装方式不同,换相开关表会有一定的区别。具体可以根据厂商提供的资料或实测电机霍尔输出来确定关系。
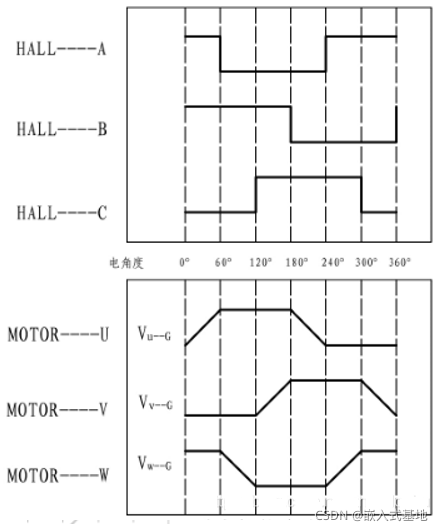
如下为一种电机的霍尔输出与反电动势输出示意,可知在电机霍尔A输出由1变为0时,控制U+开通。
BLDC有感控制系统如下:
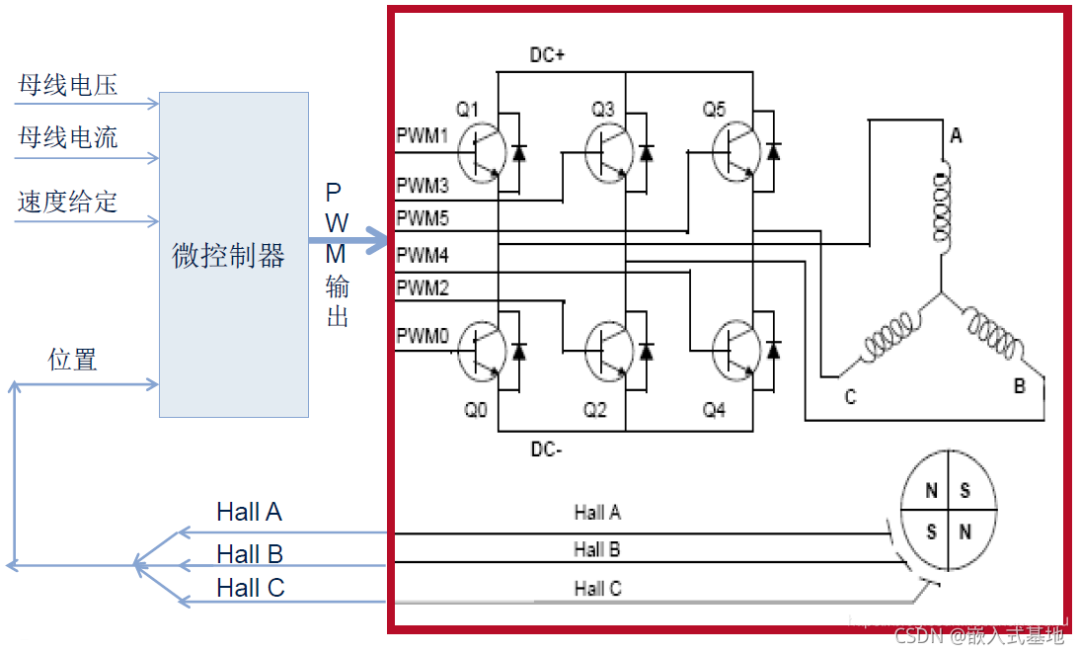
BLDC速度控制
在BLDC电子换相的基础上,通过更改导通时PWM占空比即可改变等效的输出电压, 从而更改来实现调速。
在这里插入图片描述
BLDC无感控制
BLDC使用霍尔传感器时,存在以下问题:HALL的安装条件受到限制、Hall影响系统可靠性(Hall易损坏,需要检修)、Hall对安装精度有要求、有一定成本。因此有必要研究BLDC的无感控制方法。
BLDC 无传感器控制的主要任务就是对转子位置进行估计。两种基本技术如下:
基于反电动势感应的技术:基于反电动势过零来进行换相;要求反电动势足够高,速度范围在额定转速的5-10%至100%。
基于电机电感凸极的技术:基于瞬态电流测量;速度范围为静止至标称速度的约20%。
常用的是基于反电动势过零检测的方法,但这要求电机有一定速度;有时候会结合使用,但需要使用复杂的控制算法。下面主要对基于反电动势感应的技术进行介绍。
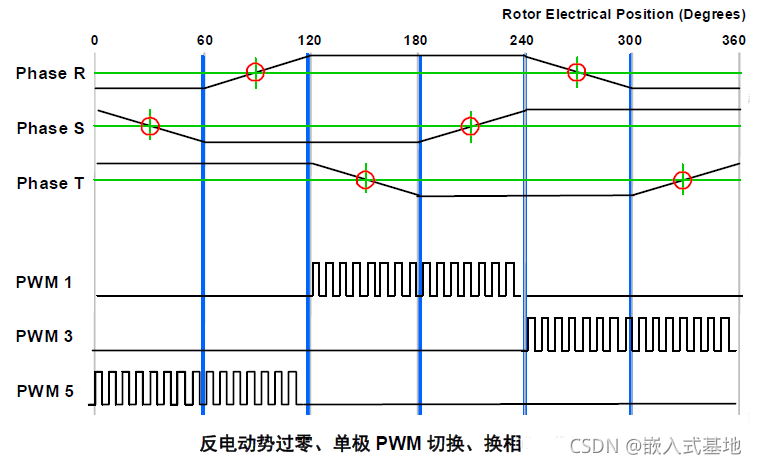
正确换相的电机相绕组电压波形与反电动势波形如图所示。从图中可得到正确的换相点应在过零点延迟30°。因此,反电动势过零信号可以用作估计正确换相时间点的计算依据。
原文标题:直流无刷电机该如何控制?
文章出处:【微信公众号:硬件攻城狮】欢迎添加关注!文章转载请注明出处。
-
TLE9893如何驱动无感BLDC?2024-01-24 0
-
使用MOTOR PILOT驱动无感BLDC总是报错,如何解决?2024-03-29 0
-
无感BLDC控制李开鸿 2023-04-08
-
BLDC无感驱动调试李开鸿 2023-04-12
-
无感BLDC控制问题2017-08-21 0
-
请问bldc无感控制如何使用timer1的com事件?2019-01-24 0
-
003Plus, 51单片机BLDC有感和无感控制C代码开源资料2019-02-13 0
-
8位MCU的无感BLDC设计2019-04-14 0
-
如何使用Arduino开发板和ESC控制无感BLDC外转子电机的速度2021-08-11 0
-
笙泉BLDC MCU: 应用于FOC无感控制2023-05-08 0
-
帮忙推荐无感带驱动的无感方案BLDC方波2023-06-16 0
-
TMPM370无传感器BLDC电机驱动的控制方法和电路等资料详解2019-05-08 2180
-
BLDC的无感控制方法2022-07-22 3806
-
无刷直流电机的梯形控制2022-11-01 1227
全部0条评论

快来发表一下你的评论吧 !
