

LiDAR激光雷达技术原理及Arduino示例代码纠错
电子说
描述
激光雷达(Light Detection and Ranging,LiDAR)即激光探测和测距,又称光学雷达,是自动驾驶领域的一种基础感测技术。LIDAR是激光科技与雷达技术的组合,以下以无人机和自动驾驶领域常用的LIDAR-Lite系列为例,介绍LIDAR与Arduino开发板的连接几测距示例。
LiDAR工作原理
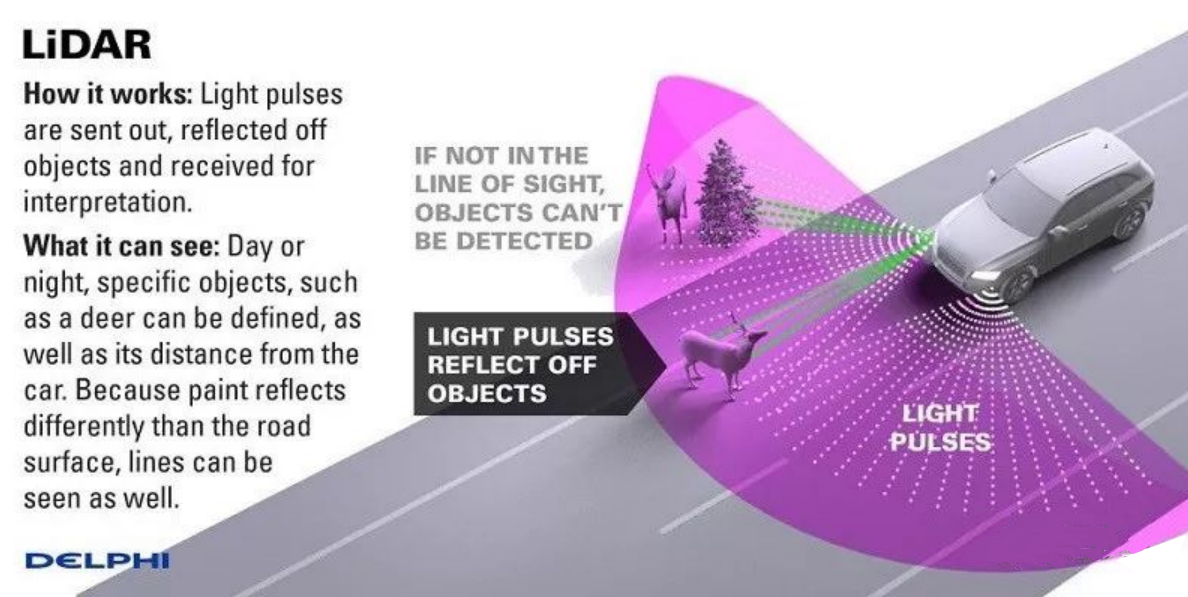
LiDAR工作原理与通信雷达一样,都是飞行时间测量法(Time of Flight,TOF),只是发射介质采用的是对人畜无害的红外光束(Light Pluses),而不是无线电波。
 激光雷达LiDAR示意图
激光雷达LiDAR示意图
LiDAR通过发射、反射和接收红外光束来探测白天或黑夜下的特定物体及动态数据,甚至由于反射度的不同,车道线和路面也是可以区分开来的。对于车用激光雷达,光速是每秒30万公里,要区分目标厘米级别的精确距离,对传输时间测量分辨率必须做到1纳秒。要如此精确的测量时间,对应的测量系统的成本就很难降低,还需要使用巧妙的方法降低测量难度。
 激光雷达LiDAR系统组成
激光雷达LiDAR系统组成
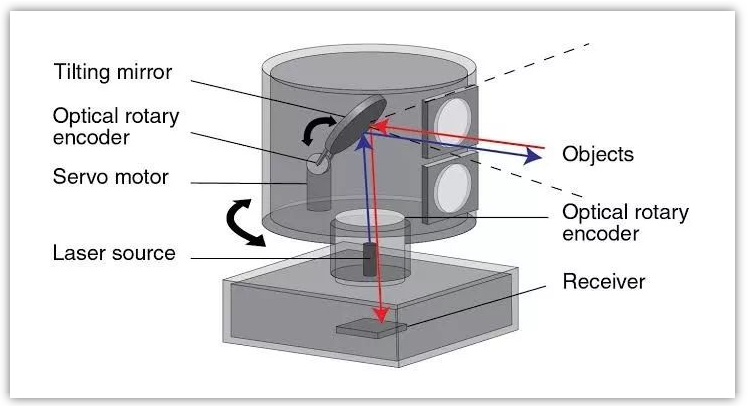
LiDAR系统一般包括激光发射光源、接收器、伺服电机、斜面镜和光学旋转编码器(又称圆光栅)几部分。通过旋转的机械镜面测量激光发出和收到回波的时间差,LiDAR可确定目标的方位和距离。由于激光雷达主动发射激光,因此受环境光变化的影响小,测距精确。
LiDAR与Arduino连接
LIDAR是激光科技与雷达技术的组合,不但应用前景广阔,使用也非常简便。通过Arduino开发板就能实现测距应用,必要的物料BOM表如下:
USB micro-B电缆 USB 2.0 A-B型 x1
电阻器 1/4W 500欧姆 x1
SparkFun Arduino开发板 DEV-15123 x1
LIDAR-Lite v3传感器 Garmin SEN-14032 x1
电容器 1000uF/25V去耦铝电解电容器 x1
面包板 x1
跳线 若干
 LIDAR-Lite激光雷达
LIDAR-Lite激光雷达
其中,LIDAR-Lite前方有两个镜筒,里面分别是激光发射器和接收器,用以发现和检测目标。侧面的电气接口用来连接6-wire电缆。底部的4个安装孔用来固定传感器,螺丝规格为 #6 or M3.5。
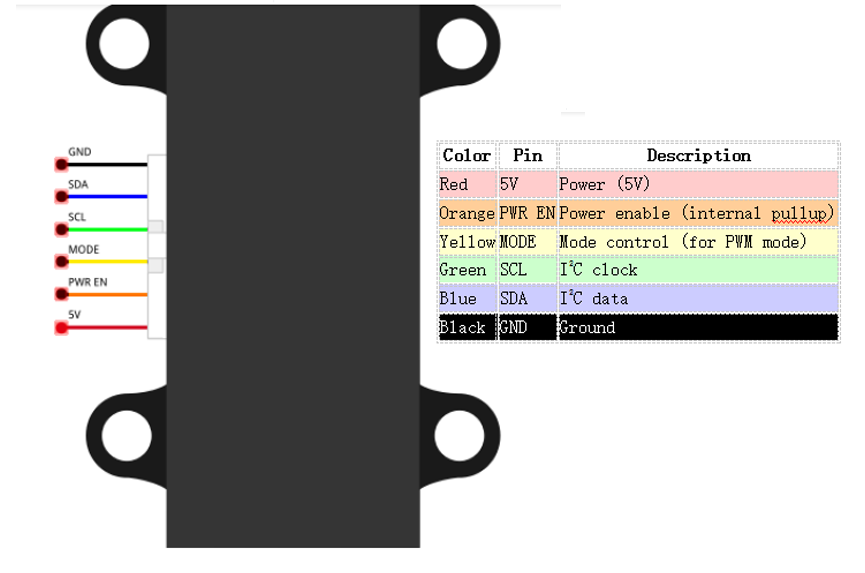
LIDAR-Lite有6个引线,用来与控制板通信。其功能分别为:
红色:5V,连接5V电源。
橙色:PWR EN,电源使能(内部上拉)
黄色:MODE,模式控制(用于PWM模式)
绿色:SCL,I2C时钟
蓝色:SDA,I2C数据
黑色:GND,接地线
 LIDAR-Lite的引线及功能说明
LIDAR-Lite的引线及功能说明
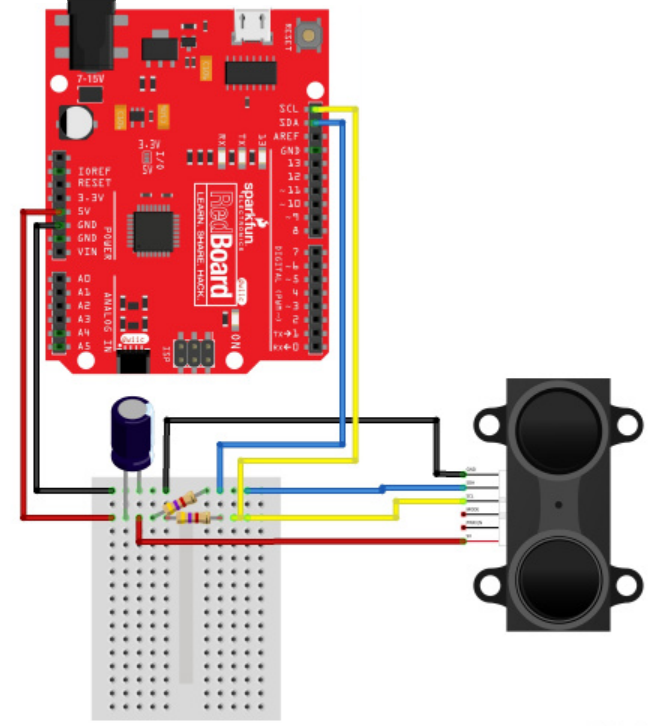
由于LIDAR-Lite工作于4.5V to 5.5V,消耗的连续电流高达135mA (待机状态为105mA),为了维持稳定工作,需要在5V电源和GND之间连接一个680μF电容器,并尽量靠近LIDAR传感器单元。
用于SCL和SD线路的I2C总线上拉电阻器一般为4.7kΩ,如果链路较长或系统器件较多,可改用较小阻值的电阻元件。当线路长度超过允许长度时,可采用总线扩展器。
 LIDAR传感器与Arduino开发板连接
LIDAR传感器与Arduino开发板连接
按照电路图将LIDAR传感器与RedBoard或者其他Arduino兼容开发板连接,IDAR-Lite就可以通过I2C总线来测量距离了。
LiDAR库文件及代码
连接好电路图后,用USB电缆将LiDAR连接到PC,就可以安装专门的Arduino库文件了。这很简单,打开Arduino Library Manager按照提示操作就OK了。如果这些库文件没有链接到Arduino IDE,就需要手动操作,过程也不复杂。
库文件装好后,打一个新的Arduino sketch,拷入如下代码:
/**
* LIDARLite I2C Example
* Author: Garmin
* Modified by: Shawn Hymel (SparkFun Electronics)
* Date: June 29, 2017
*
* Read distance from LIDAR-Lite v3 over I2C
*
* See the Operation Manual for wiring diagrams and more information:
* http://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf
*/
#include #include
// Globals
LIDARLite lidarLite;int cal_cnt = 0;
void setup()
{
Serial.begin(9600); // Initialize serial connection to display distance readings
lidarLite.begin(0, true); // Set configuration to default and I2C to 400 kHz
lidarLite.configure(0); // Change this number to try out alternate configurations
}
void loop()
{
int dist;
// At the beginning of every 100 readings,
// take a measurement with receiver bias correction
if ( cal_cnt == 0 ) {
dist = lidarLite.distance(); // With bias correction
} else {
dist = lidarLite.distance(false); // Without bias correction
}
// Increment reading counter
cal_cnt++;
cal_cnt = cal_cnt % 100;
// Display distance
Serial.print(dist);
Serial.println(" cm");
delay(10);
}
代码上传成功后,打开Serial Monitor,就可以看到如下显示的测量结果。
 LIDAR传感器的测距结果
LIDAR传感器的测距结果
如果Serial Monitor显示有误(nack error),大部分情况是I2C总线连接问题,因为I2C总线对接触不良非常敏感,最好是事先在面包板上焊接几根导线出来。当然,也可能是上拉电阻太大了,可换个小一点阻值的试试,直到正常测量为止。
-
激光雷达分类以及应用2017-09-19 0
-
常见激光雷达种类2017-09-25 0
-
消费级激光雷达的起航2017-12-07 0
-
北醒固态设计激光雷达2018-01-25 0
-
北醒固态激光雷达2018-01-25 0
-
固态设计激光雷达2018-01-25 0
-
激光雷达和相机之间的外参标定2019-04-12 0
-
TOF激光雷达2019-06-07 0
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 0
-
激光雷达知多少:从技术上讲讲未来前景2020-07-14 0
-
激光雷达2021-01-17 0
-
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享2021-07-22 0
-
洛微科技荣获“EAC 2023 激光雷达LiDAR卓越创新企业”奖2023-06-16 436
-
宏展LiDAR激光雷达TCT温循试验方案2023-01-13 655
-
激光雷达LIDAR基本工作原理2024-03-05 667
全部0条评论

快来发表一下你的评论吧 !
