

用于智能医疗的智能传感器和医疗物联网
描述
人体运动姿态跟踪和肌肉分析通过各类传感器或多种类型摄像头来捕捉骨关节的连续运动,从而实现连续评估运动部位的肌肉活动值。准确跟踪人群的运动姿态,分析其肌肉运动情况,对于制定个性化的康复方案具有重要的价值。分析人体肌肉状态已引起社会的广泛关注。基于肌肉状态分析工作的肌电图(EMG)模式识别方法已经提出多年。然而,由于佩戴不适且价格昂贵等原因,在日常生活中使用机械臂和惯性传感器进行运动跟踪与肌肉状态分析非常不方便。
近年来,利用集成了柔性传感器的智能可穿戴传感器来监测人体健康状态引起了广泛的兴趣。该方法用户体验好、穿着舒适、价格便宜。因此在本研究中,研究者提出利用集成了柔性传感器的智能服饰来收集手臂运动数据,以评估手臂连续运动的运动学信息,并预测手臂每块肌肉的EMG信号。
据麦姆斯咨询报道,近日,厦门大学信息学院郭诗辉副教授课题组在Hindawi旗下开源期刊Journal of Sensors发表了以“Intelligent Sensors and Internet of Medical Things for Smart Healthcare”为主题的研究论文。郭诗辉副教授为该研究论文的通讯作者,主要从事虚拟现实、人机交互、计算机图形学的研究工作。
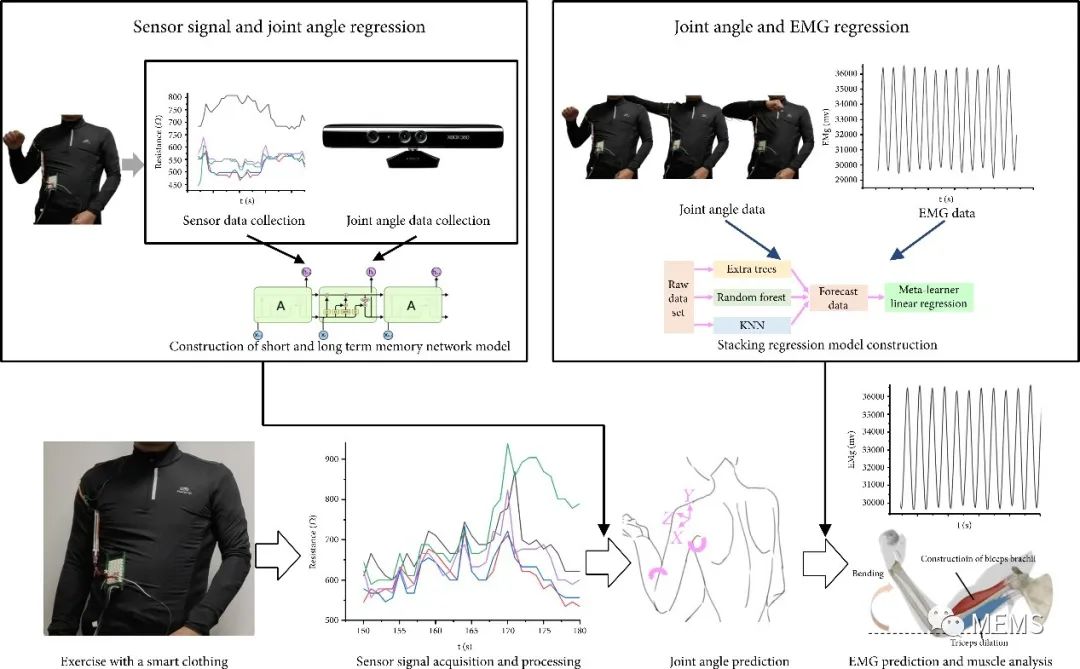
肌肉状态分析的工作流程图
这项研究提出了一种基于柔性传感器的人体姿态跟踪方法。通过分析计算捕捉到的姿态以获得上肢的关节角度,并利用该角度连续评估上肢运动的EMG信号。
首先,利用集成了长短时记忆(LSTM)模块的神经网络回归模型,对智能服饰采集到的传感器电阻和Kinect采集到的角度数据进行连续评估。然后,对5名实验对象的六种肩肘运动角度及相应的EMG信号进行预处理并校准。回归分析采用基于极端随机树(extra trees)的堆叠回归模型。研究实验结果表明,传感器电阻对关节角度的平均估计绝对误差为3.45度,关节角度对EMG信号的绝对百分比误差仅为1.82%。
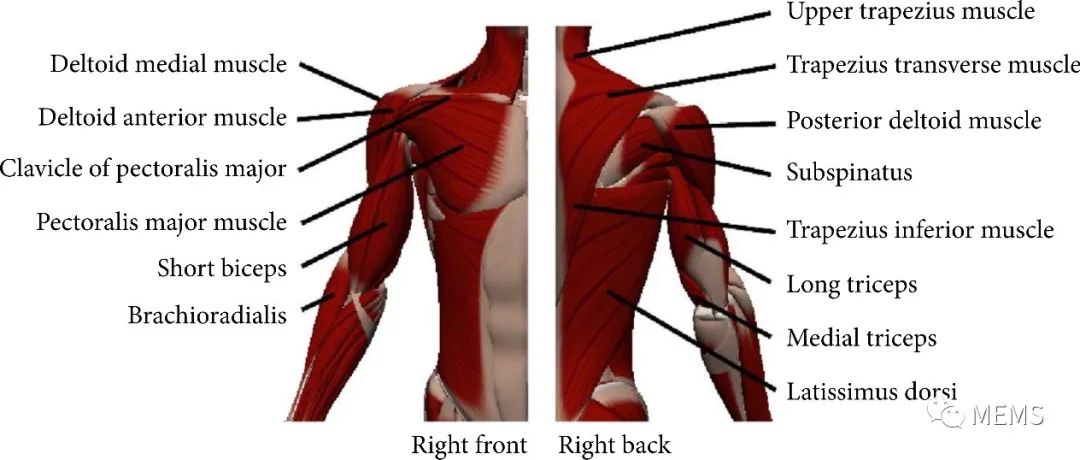
从14块主要上肢肌肉采集EMG信号
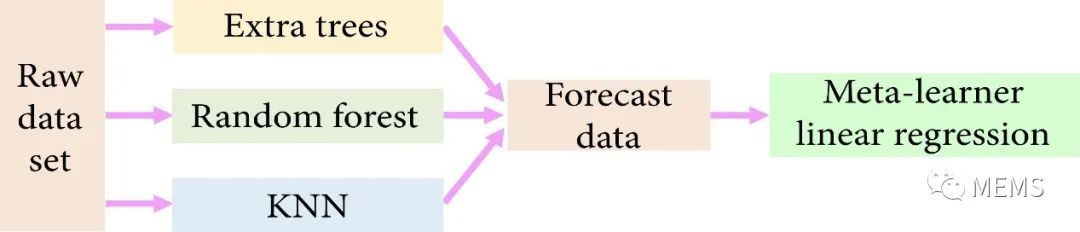
堆叠模型主要包括极端随机树、随机森林和KNN基本模型
这项研究的实验结果表明,长短时记忆网络能够有效解决柔性传感器的非线性和迟滞问题,堆叠模型能够很好地回归出关节角度数据和EMG信号数据。该方法为未来家庭健康监测和运动指导提供了更多的可能性,例如,用户可以基于该系统实现在线医疗和在线诊断。然而,该领域仍有许多问题亟需解决和研究,如传感器位置偏移、服装褶皱引起的变形等,这些因素都会影响预测结果的准确性。因此,研究人员表示将在后续工作中继续解决上述问题,并将其所提出的基于机器学习的流程应用于生物信息学和计算生物学等其他领域。
这项研究工作获得国家自然科学基金(62072383、61702433、62077039)、中央高校基本科研业务费专项资金资助(2072019006)、北京航空航天大学虚拟现实技术与系统国家重点实验室开放课题资助项目基金(VRLAB2020B17)的支持。厦门大学生命科学学院的Zhiyong Chen和北大荒集团总医院的Qingsuo Wang为该研究的共同第一作者。
论文链接:
https://doi.org/10.1155/2022/5227955
审核编辑 :李倩
-
智能穿戴及便携健康医疗心率传感器2014-05-04 0
-
智能医疗市场发展的规模及趋势2014-08-06 0
-
智能家庭远程医疗系统2017-08-11 0
-
物联网在智慧医疗领域的应用有哪些?2017-12-07 0
-
你了解物联网卡在医疗行业的这些作用吗?2018-01-18 0
-
物联网给传感器产业带来巨大机遇:五大领域需求将暴涨2018-10-23 0
-
物联网技术在智能医疗的应用2018-10-26 0
-
远程医疗:物联网设备市场的前沿2018-11-20 0
-
人工智能、大数据、物联网+医疗是这样落地的(二)2018-12-10 0
-
物联网在医疗保健领域的当前和未来应用2018-12-17 0
-
基于智能传感器的物联网应用开发2019-07-22 0
-
智能医疗系统项目案例分享!2019-09-17 0
全部0条评论

快来发表一下你的评论吧 !
