

如何使用Simulink构建虚拟车辆仿真
描述
虚拟车辆是车辆产品开发生命周期的虚拟化,通常需要进行车辆行为的系统级仿真。虚拟车辆仿真使汽车工程师能够快速深入了解真实世界的行为,在不同场景下执行虚拟测试,并验证嵌入式软件的功能。以这种方式进行前置开发有助于加快变体评估,安全地研究边缘情形,并提高产品质量。 要开发虚拟车辆,您需要经过以下五个步骤:
创建车辆模型
集成嵌入式软件
定义测试场景
仿真和分析
部署仿真
“对于在整个开发周期中持续评估需求、模型和软件来说,虚拟车辆仿真至关重要。”
—— Robert ter Waarbeek,福特公司技术专家
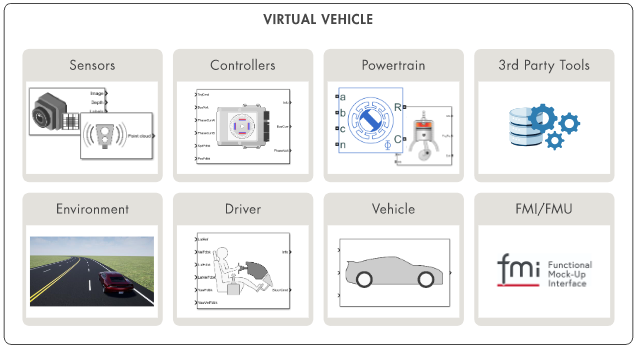
创建车辆模型您可以调节预置的参考应用以匹配您的车辆设计。这些参数化模型涵盖动力总成和车辆动力学,可以应用于车辆能量优化、燃油经济性分析、热分析和部件选型。您可以使用电气、机械、流体、热和多体库中的组件进一步自定义这些模型。 对于自动驾驶应用,您可以结合使用各种详细的传感器模型,例如相机、激光雷达、雷达和超声波传感器。 Simulink 是开放的集成平台,拥有超过 100 个连接合作伙伴,它们均为 Simulink 提供专用的集成接口。您可以利用 Simulink 内置的功能样机接口 (FMI) 支持功能来集成自定义 FMU。
集成嵌入式软件引入您自己的控制算法,或使用预置的组件和监督控制器,以快速评估整车的闭环性能。 要测试在 Simulink 和 Stateflow 中建模的控制器,您可以从模型在环 (MIL) 仿真开始。您可以很直接地将这些组件与虚拟车辆模型连接起来,用于在前期设计阶段有效地评估算法。 在开发后期,您可以使用产品级 C/C++ 代码进行软件在环 (SIL) 仿真。您可以通过 Simulink 内置的 C/C++ 接口调用或编译 C 代码,并分析导入代码的代码覆盖率。
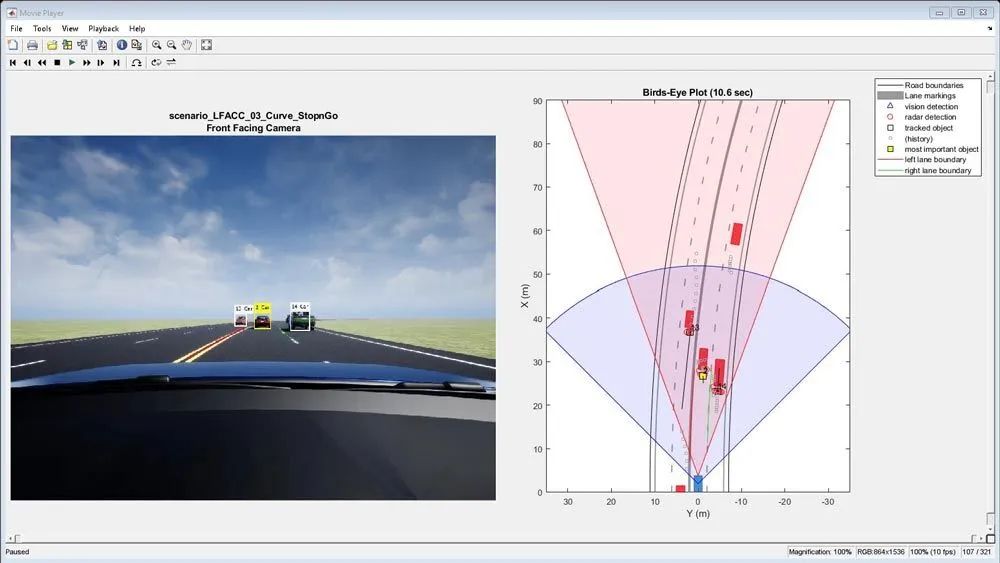
定义测试场景使用真实的参数化场景和驾驶场景进行仿真是虚拟开发过程中至关重要的一部分,对于自动驾驶而言尤其如此:要实现规定的数十亿英里试驾以确保其安全性,这是唯一现实可行的方法。借助 MATLAB、Simulink 和多种附加产品,您可以交互式创建复杂的三维路网和标记,或者通过导入高清地图数据生成路网区域,然后添加交通参与者和轨迹。为了对相机、雷达和激光雷达传感器进行仿真,您可以利用在 Unreal 环境中运行的传感器模型与 Simulink 协同仿真。 对于电气化动力总成系统开发或其他传统车辆应用,可使用一套预定义的驾驶操作或标准的行驶工况数据来帮助您快速评估车辆的性能。您可以轻松对其加以修改,也可以根据 MATLAB 中记录的车队测试数据合成自定义行驶工况。
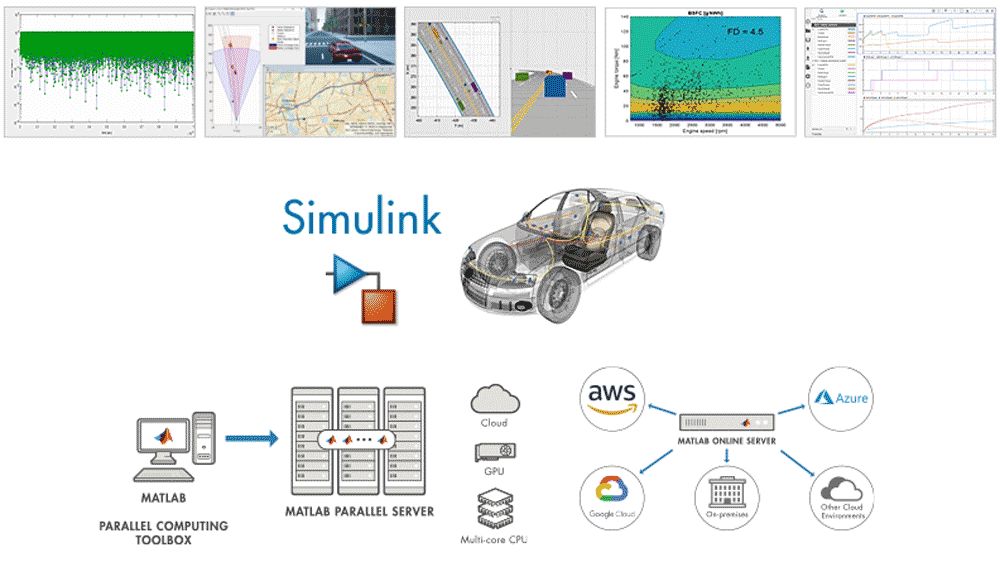
仿真和分析基于模型的设计支持您在建模时检测和更正系统设计缺陷。您可以向前和向后步进仿真,以深入了解车辆设计并理解其意外行为。 当整车模型的仿真与预期一致时,优化性能并运行大量仿真研究,以探查设计空间或验证整个系统行为。您可以将作业分发到本地多核、GPU、集群或云中进行并行执行,从而方便地扩展您的仿真。 得到仿真结果后,您可以使用内置的可视化工具和灵活的 MATLAB 数据可视化功能查看结果。此外,您可以根据您所在组织的标准自动生成仿真报告。
部署仿真仿真的受益者并不仅仅是建模专家;您可以让更多团队从中获益。使用 App 设计工具,您可以创建自定义 App,并将其打包为 MATLAB App、独立桌面 App 或 Web App 进行分发。 如果要将您的虚拟车辆仿真与真实世界的车队测试数据相集成,您还可以选择将仿真部署到云,利用其中存储的海量数据。 要验证硬件/软件集成,您可以使用 MathWorks 的代码生成产品部署整车模型以进行硬件在环 (HIL) 测试。
审核编辑 :李倩
-
基于MATLAB/Simulink的系统仿真技术与应用2008-06-19 0
-
THS系统的车辆平台Simulink模型搭建2021-08-27 0
-
虚拟同步电机simulink仿真并电网模型仿真参数设置2021-09-03 0
-
关于虚拟同步机matlab/simulink控制仿真不看肯定后悔2021-10-25 0
-
simulink建模与仿真 下载2008-06-16 1818
-
Simulink建模与仿真教材2009-04-19 681
-
simulink仿真pdf2009-04-19 764
-
SIMULINK仿真的运行2008-06-19 4004
-
SIMULINK仿真2008-10-17 3562
-
Simulink仿真教程介绍2015-12-28 1181
-
simulink建模与仿真12015-12-29 731
-
传动系统模型在环虚拟车辆仿真研究2018-03-01 789
-
基于Matlab/Simulink的车辆起步过程的仿真2021-06-03 674
-
并网型虚拟同步发电机控制Matlab/simulink仿真说明2023-03-28 334
-
VR车辆虚拟仿真驾驶带来哪些沉浸式体验?2023-05-15 1088
全部0条评论

快来发表一下你的评论吧 !
