

双轴遥感按键简介
电子说
1.2w人已加入
描述
一. 前言
在控制物体移动方面,像控制智能小车、平衡车、四轴飞控,双轴遥感按键远比按键要实用,而且引脚少,程序编写简单,是时候该放弃对按键的使用了,来看看双轴遥感按键吧!
二. 双轴遥感按键简介
双轴,可以输出X,Y两个方向上的电压值表示当前遥感所处的位置。按键,可以按下,具有按键的功能,看到这里是不是觉得它功能强大!!!。每个轴共有三个引脚,分别是VCC,GND和信号引脚。所以说,它一共用六个引脚,外加按键的四个引脚。VCC可以接3.3-5V。信号引脚输出的电压为0-VCC。遥感处于中间位置的时候,两个轴输出的电压为VCC/2。以X轴为例,如果遥感在最右边,那么输出为0V,在最左边,那么输出为VCC。是不是觉得采集它的数据很容易,通过STM32内部的ADC就可以很轻松的采集到了,(#^.^#)。

二. 双轴遥感信号采集
采集部分我打算略写,一共两个通道,X,Y,使用ADC采集,ADC的配置基本上是通用的。采集到的值理论上为0-4096。
三. 双轴遥感信号校准
由于实际上采集到的信号不为0-4096,这里需要有一个校准的操作。也就是采集多次各个方向上的遥感数据,然后取平均。X轴的最左边为例,这里采集了400次。同时对模拟量进行一个判断,在最左边的就要,否则舍弃。/*XL方向校准*/void Rocker1CalibrationXL(void){uint16_t i;uint32_t valueSum = 0;for(i = 0 ;i < 400; ){uint16_t value = getX1Value(); /*获取X轴的模拟量*/if(value > 0xf600) /*判断模拟值,是不是在左边了*/{valueSum += value;i++;}}XOffSetL = valueSum / 400;}
四. 双轴遥感信号归一化
这里将X,Y两轴的信号全部归一化到0-100区间内,至于为什么归一化到这个区间内,是为了方便计算遥感的角度值。具体做法如下- 获取原始数据
- 计算原始数据到对应两边界的距离
- 将计算得到的结果扩大100倍(避免小数),除以区间范围
- 左边 加 (100 - 右边)除以2得到最终结
XValue = getX1Value(); //获取X方向遥感数值if(XValue > XOffSetL)XtempL = 0; /*小于左边界,直接复制为0*/elseXtempL = XOffSetL - XValue ;if(XValue < XOffSetR)XtempR = 0; /*大于右边界,直接复制为0*/elseXtempR = XValue - XOffSetR;uint32_t XtL = XtempL * 100;uint32_t XtR = XtempR * 100;XtL = XtL / (XOffSetL - XOffSetR);XtR = XtR / (XOffSetL - XOffSetR);X = (XtL + (100 - XtR)) / 2; /*结果为遥感到左边界的距离,0 - 100*/
五. 计算双轴遥感的角度
计算出来的角度分布如下图所示。
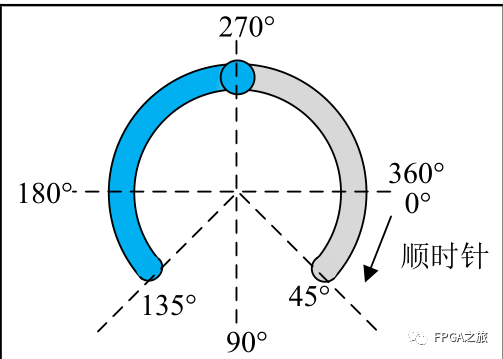
/*将输入的pos信息 转换为角度信息*//*左为180度 上为270度*/uint16_t ConvPos2Angle(uint16_t pos){uint16_t angle = 0;uint8_t X = pos;uint8_t Y = pos >> 8;uint16_t Xtemp = 180 * X;uint16_t Ytemp = 180 * Y;/*遥感位置中心 直接返回*/if(X < 55 && X > 45 && Y < 55 && Y > 45)return RockerNone;/*Y轴位于上方,就是180°加上X轴的偏移*/if(Ytemp < 9000)angle = 18000 + Xtemp;else /*Y轴位于下方,就是180°减上X轴的偏移*/{if(Xtemp > 18000)angle = 0;elseangle = 18000 - Xtemp;}/*由于遥感数据有误差,需要截取*/if(angle > 36000)angle = 36000;return angle / 100;}
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
全部0条评论

快来发表一下你的评论吧 !
