

变桨控制系统的风力涡轮机的设计
工业控制
描述
在这种自然和可再生资源很容易获得的地区,风能在公用事业规模应用中变得越来越流行。像天气和气候的大多数因素一样,风速是可变的,从电力工程师的角度来看是非常不可预测的。因此,风力涡轮机的设计不仅要能够承受大自然的全部能量,还要能够在尽可能广泛的输入范围内有效地收集能量。以下公式告诉您风中有多少能量(而不是您可以提取多少):
可用风力(瓦)= 1/2 * Da * A * V³
其中:
Da = 空气密度 = 1.23(1 立方米空气在海平面重 1.23 公斤)
A = 风力涡轮机的扫掠面积,以平方米为单位。对于叶片直径为 3 m(约 10 ft.)的风力涡轮机,扫过面积约为 80 sq. ft.
V = 速度(风速)。注意 V 是立方的。这意味着如果您将风速翻倍,您将获得 8 倍的能量。设计用于以 10 mph 风速发电的风力涡轮机必须在 20 mph 风速下处理 8 倍的能量。
现代水平轴涡轮机是风力收集的最常见配置。几乎所有大型涡轮机的一个关键特性是能够控制叶片的桨距。通过控制叶片螺距,风车可以在更大的风速范围内产生有用的电力,并且可以防止在大风时超过额定轴速(再次,因为刚刚讨论的增加风速的 V3 效应)。因此,在使用微控制器进行传感和系统控制的所有风力发电机会中,最基本和最关键的是可变桨距叶片的转子速度。
查看从零时间(初始启动)开始的安装,我们可以认为最终目标是将发电机轴速度平稳提升到额定转速。普遍接受的方法是将风车的运行区域细分为四个区域。区域 1 是不足以运行风车的风。运行开始或切入速度定义了区域 2 的底部。涡轮机的全额定速度和功率定义了区域 3 的下边缘。需要安全切断的不安全风占据区域 3 的上边界。
考虑到控制系统必须使叶片在区域 2 中旋转并在整个区域 3 中保持额定规格,显然系统要求相当高。功率曲线迅速变化,因为如前所述,风能取决于风速的立方。控制器还需要解决覆盖 2 区和 3 区的整个运行范围内可能很严重的风速波动。
系统数据
在提供输入之前,变桨控制系统需要数据。有两种选择。风速可以通过位于风车上或附近的风速计独立于动力涡轮机来获取。这些设备通常用于确定风速是否足以启动涡轮机。这种类型的监督控制也可以集中用于集群或风电场。一旦涡轮机在线(区域 2 和 3),大多数设计使用轴速作为控制输入,因为它也可以用作系统设定点。
开环控制是设置风车叶片间距的一种选择。然而,这不是最好的方法,因为它可能会导致转子不稳定,从而产生不安全的机械应变。闭环控制是首选并且是风电行业中最常见的方法。比例积分微分 (PID) 控制器(图 1)是工业控制系统的行业标准。它提供了简单性和性能的平衡。PID 控制器将“误差”值计算为测量过程变量和所需设定点之间的差值。控制器试图通过调整过程控制输入来最小化误差。
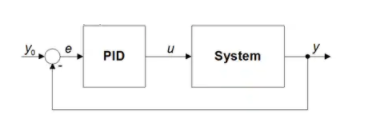
图 1:带有 PID 控制器的闭环系统。(由爱特梅尔提供。)
PID控制算法允许系统根据测量信号的历史和变化率做出响应,从而使系统准确稳定。对于桨距控制和电机控制等系统,通常会忽略导数项 (D),因为它易受噪声影响。这给我们留下了一个 PI 控制器。
作为开发 PI 控制器的起点,Atmel 提供了完整的文档和 C 中离散 PID 控制器(例如AVR221)的工作实现。¹ AVR221 代码适用于任何 Atmel AVR 设备,从 8 位到 32 位微控制器。在操作中,PID 控制器获取测量的输入,在本例中为轴速度,并将其从期望值中减去以提供误差值。该算法(图 2)通过比例项处理当前误差,通过整数项处理过去值,并使用导数项预测未来值。如前所述,电动机和发电机控制系统通常选择通过将微分系数设置为零来消除预测能力。
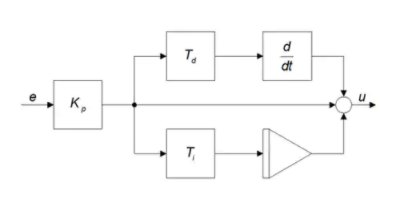
图 2:PID 控制器原理图。(由爱特梅尔提供。)
初始参数通常来自系统建模。为了优化控制器响应,系统通常会在尽可能接近模拟最终运行条件的环境中进行调整。至于 PI 算法本身,主要考虑的应该是避免系统不稳定。对于俯仰控制,系统设计人员应在积分项中添加饱和度校正。在离散控制器代码中,这可以通过设置 MAX_I_TERM 来完成。正确的值将取决于实际的风力涡轮机系统参数,并且可以通过模拟进行估计并在原型测试期间进行验证。
尽管示例控制系统处于操作控制级别,但离散 PID 控制器的灵活性意味着可以在子系统级别为任何低级别控制器部署类似的功能,以测量振动、齿轮箱温度或风速并将值报告给电子监管层。Atmel MCU 提供小至最小的 6 引脚 TinyAVR 设备,例如 8 位ATTINY10-TSHR,即使是最普通的任务,也可以在整个涡轮机中进行稳定控制。
调整 PI 控制器参数的最佳方法是使用涡轮机的运行模型或风洞模型。代码更改不需要从控制器板上移除 MCU 来闪存存储器,而是使用通用编程器。Atmel 允许设计人员在原型设计期间修改微代码,以开发最准确、最强大的控制系统。为了简化测试期间的代码下载,Atmel 提供了ATAVRISP2完整的系统内编程器(图 3)。
概括
随着为满足世界不断增长的能源需求而对清洁发电的需求增加,风能成为太阳能和其他能量收集系统的有吸引力的替代品(或补充品)。具有简单而强大的控制算法的小型微控制器使风力涡轮机设计人员能够创建高效的能量收集系统。这些相同的算法具有足够的通用性,甚至可以控制用于涡轮速度控制的叶片桨距调整的最基本和最关键的功能。桨距角控制是控制风力涡轮机转子产生的空气动力最常用的手段。俯仰角控制还对可以由 PI 控制器控制的空气动力负载产生影响,以实现更低的扭矩峰值以及更低的疲劳负载。本文讨论了合适的微控制器设备、控制算法、和用于风力涡轮机设计的编程工具。使用提供的链接访问 Digi-Key 网站上的产品信息页面,可以获得有关此处提及的产品的更多信息。
-
基于CAN 总线通讯的变桨距风力发电控制系统2009-09-11 0
-
Matlab风力发电机模型【含Matlab源码】 精选资料下载2021-07-12 0
-
【源码】风力涡轮机模型仿真 精选资料分享2021-07-12 0
-
求一款陆地风力涡轮机2021-07-12 0
-
风力涡轮机设计中的旋转编码器2009-08-27 1231
-
风力涡轮机和风力电场应用工业用光纤产品2016-01-06 358
-
怎么用纸板做风力涡轮机2018-09-20 3812
-
新型永磁技术-怒海中的超导风力涡轮机2018-11-14 4982
-
风力涡轮机的工作原理2018-12-25 11231
-
机舱式测风激光雷达,为风力涡轮机打造“风机之眼”2019-04-09 4388
-
风力涡轮机正在走向数字化2020-05-28 798
-
风力涡轮机可持续的能源解决方案2020-09-28 2170
-
无刷滑环在风力涡轮机上的应用2022-05-30 270
-
基于Arduino Uno的风力涡轮机MPPT调节器2022-12-21 281
-
如何使用波形分集雷达抑制风力涡轮机干扰2023-05-04 557
全部0条评论

快来发表一下你的评论吧 !
