

如何优雅且体面的图像分割
描述
图像分割,作为计算机视觉的基础,是图像理解的重要组成部分,也是图像处理的难点之一。
那么,如何优雅且体面的图像分割?
5行代码、分分钟实现的库——PixelLib,了解一下。
当然,如此好用的项目,开源是必须的。
为什么要用到图像分割?
虽然计算机视觉研究工作者,会经常接触图像分割的问题,但是我们还是需要对其做下“赘述”(方便初学者)。
我们都知道每个图像都是有一组像素值组成。简单来说,图像分割就是在像素级上,对图像进行分类的任务。
图像分割中使用的一些“独门秘技”,使它可以处理一些关键的计算机视觉任务。主要分为2类:
语义分割:就是把图像中每个像素赋予一个类别标签,用不同的颜色来表示。
实例分割:它不需要对每个像素进行标记,它只需要找到感兴趣物体的边缘轮廓就行。
它的身影也经常会出现在比较重要的场景中:
无人驾驶汽车视觉系统,可以有效的理解道路场景。
医疗图像分割,可以帮助医生进行诊断测试。
卫星图像分析,等等。
所以,图像分割技术的应用还是非常重要的。
接下来,我们就直奔主题,开始了解一下PixelLib,这个神奇又好用的库。
快速安装PixelLib
PixelLib这个库可以非常简单的实现图像分割——5行代码就可以实现语义分割和实例分割。
老规矩,先介绍一下安装环境。
安装最新版本的TensorFlow、Pillow、OpenCV-Python、scikit-image和PixelLib:
pip3 install tensorflow pip3 install pillow pip3 install opencv-python pip3 install scikit-image pip3 install pixellib
PixelLib实现语义分割
PixelLib在执行语义分割任务时,采用的是Deeplabv3+框架,以及在pascalvoc上预训练的Xception模型。
用在pascalvoc上预训练的Xception模型执行语义分割:
import pixellib from pixellib.semantic import semantic_segmentation segment_image = semantic_segmentation() segment_image.load_pascalvoc_model(“deeplabv3_xception_tf_dim_ordering_tf_kernels.h5”) segment_image.segmentAsPascalvoc(“path_to_image”, output_image_name = “path_to_output_image”)
让我们看一下每行代码:
import pixellib from pixellib.semantic import semantic_segmentation #created an instance of semantic segmentation class segment_image = semantic_segmentation()
用于执行语义分割的类,是从pixellib导入的,创建了一个类的实例。
segment_image.load_pascalvoc_model(“deeplabv3_xception_tf_dim_ordering_tf_kernels.h5”)
调用函数来加载在pascal voc上训练的xception模型(xception模型可以从文末传送门链接处下载)。
segment_image.segmentAsPascalvoc(“path_to_image”, output_image_name = “path_to_output_image”)
这是对图像进行分割的代码行,这个函数包含了两个参数:
path_to_image:图像被分割的路径。
path_to_output_image:保存输出图像的路径,图像将被保存在你当前的工作目录中。
接下来,上图,实战!
图像文件命名为:sample1.jpg,如下图所示。
执行代码如下:
import pixellib from pixellib.semantic import semantic_segmentation segment_image = semantic_segmentation() segment_image.load_pascalvoc_model(“deeplabv3_xception_tf_dim_ordering_tf_kernels.h5”) segment_image.segmentAsPascalvoc(“sample1.jpg”, output_image_name = “image_new.jpg”)
可以看到,在执行代码后,保存的图像中,所有对象都被分割了。
也可以对代码稍作修改,获取一张带有目标对象分割重叠(segmentation overlay)的图像。
segment_image.segmentAsPascalvoc(“sample1.jpg”, output_image_name = “image_new.jpg”, overlay = True)
添加了一个额外的参数,并设置为True,就生成了带有分隔叠加的图像。
可以通过修改下面的代码,来检查执行分割所需的推理时间。
import pixellib
from pixellib.semantic import semantic_segmentation
import time
segment_image = semantic_segmentation()
segment_image.load_pascalvoc_model(“pascal.h5”)
start = time.time()
segment_image.segmentAsPascalvoc(“sample1.jpg”, output_image_name= “image_new.jpg”)
end = time.time()
print(f”Inference Time: {end-start:.2f}seconds”)
输出如下:
Inference Time: 8.19seconds
可以看到,在图像上执行语义分割,只用了8.19秒。
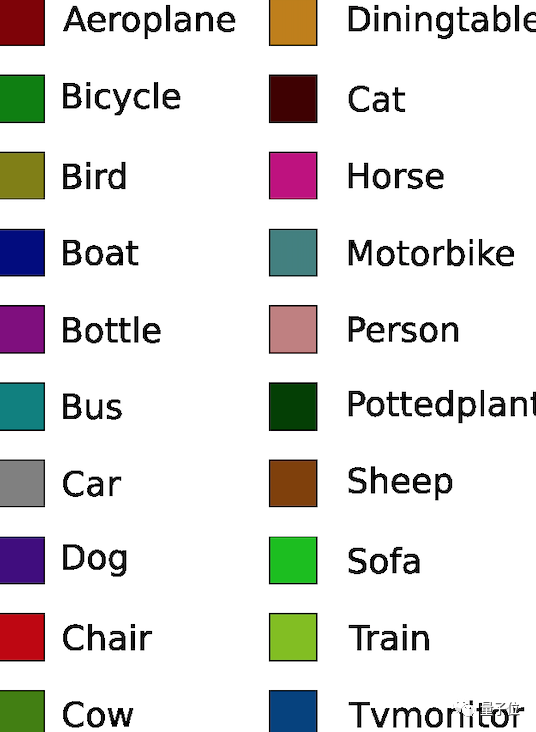
这个xception模型是用pascalvoc数据集训练的,有20个常用对象类别。
对象及其相应的color map如下所示:
PixelLib实现实例分割
虽然语义分割的结果看起来还不错,但在图像分割的某些特定任务上,可能就不太理想。
在语义分割中,相同类别的对象被赋予相同的colormap,因此语义分割可能无法提供特别充分的图像信息。
于是,便诞生了实例分割——同一类别的对象被赋予不同的colormap。
PixelLib在执行实例分割时,基于的框架是Mask RCNN,代码如下:
import pixellib from pixellib.instance import instance_segmentation segment_image = instance_segmentation() segment_image.load_model(“mask_rcnn_coco.h5”) segment_image.segmentImage(“path_to_image”, output_image_name = “output_image_path”)
同样,我们先来拆解一下每行代码。
import pixellib from pixellib.instance import instance_segmentation segment_image = instance_segmentation()
导入了用于执行实例分割的类,创建了该类的一个实例。
segment_image.load_model(“mask_rcnn_coco.h5”)
这是加载 Mask RCNN 模型来执行实例分割的代码(Mask RCNN模型可以从文末传送门链接处下载)。
segment_image.segmentImage(“path_to_image”, output_image_name = “output_image_path”)
这是对图像进行实例分割的代码,它需要两个参数:
path_to_image:模型所要预测图像的路径。
output_image_name:保存分割结果的路径,将被保存在当前的工作目录中。
上图,实战第二弹!
图像文件命名为:sample2.jpg,如下图所示。
执行代码如下:
import pixellib from pixellib.instance import instance_segmentation segment_image = instance_segmentation() segment_image.load_model(“mask_rcnn_coco.h5”) segment_image.segmentImage(“sample2.jpg”, output_image_name = “image_new.jpg”)
上图便是保存到目录的图片,现在可以看到语义分割和实例分割之间的明显区别——在实例分割中,同一类别的所有对象,都被赋予了不同的colormap。
若是想用边界框(bounding box)来实现分割,可以对代码稍作修改:
segment_image.segmentImage(“sample2.jpg”, output_image_name = “image_new.jpg”, show_bboxes = True)
这样,就可以得到一个包含分割蒙版和边界框的保存图像。
同样的,也可以通过代码查询实例分割的推理时间:
import pixellib
from pixellib.instance import instance_segmentation
import time
segment_image = instance_segmentation()
segment_image.load_model(“mask_rcnn_coco.h5”)
start = time.time()
segment_image.segmentImage(“former.jpg”, output_image_name= “image_new.jpg”)
end = time.time()
print(f”Inference Time: {end-start:.2f}seconds”)
输出结果如下:
Inference Time: 12.55 seconds
可以看到,在图像上执行实例分割,需要12.55秒的时间。
-
图像分割和图像边缘检测2017-12-19 10262
-
基于改进遗传算法的图像分割方法2009-09-19 0
-
图像分割和图像定位的c语言算法代码2011-12-16 0
-
【Firefly RK3399试用体验】之三——基于阈值的图像分割2017-07-06 0
-
图像分割—基于图的图像分割2015-11-19 741
-
基于Matlab图像分割的研究2016-01-04 728
-
图像分割技术的原理及应用2017-12-19 40334
-
图像分割的基本方法解析2017-12-20 108419
-
图像分割技巧资料2020-09-24 1611
-
如何使用Arduino和图形LCD创建体面的游戏2022-11-15 1417
-
AI算法说-图像分割2023-05-17 883
-
没你想的那么难 | 一文读懂图像分割2023-05-16 611
-
什么是图像分割?图像分割的体系结构和方法2023-08-18 2595
-
使用PyTorch加速图像分割2023-08-31 489
-
机器视觉(六):图像分割2023-10-22 516
全部0条评论

快来发表一下你的评论吧 !
