

低速CAN和高速CAN都有哪些区别呢
接口/总线/驱动
描述
1.低速容错CAN与高速CAN的定义
1986年Bosch在SAE(汽车工程人员协会)大会上提出CAN总线概念,CAN总线率先在汽车电子行业孕育。随后的1987年Intel推出第一片CAN控制器芯片82526,由此点亮CAN总线发展的星星之火。六年之后CAN国际标准ISO11898/ISO11519发布,CAN总线在通信领域的燎原之势由此展开。

图1 CAN总线应用行业
我们今天探讨的CAN总线分为:低速容错CAN、高速CAN,我们从物理层面上解读这两种总线。
高速CAN根据线缆的长度提供从5Kbit/s到1Mbit/s的波特率。这是物理层最流行的标准,这是因为它允许设备间简单的线缆连接。DeviceNet以及CANopen规范就是使用了这种物理标准。高速CAN网络在每个网络端点端接一个120欧姆的电阻。
低速/容错CAN提供从5 Kbit/s到125 Kbits/s的波特率。该标准允许在CAN总线连线失败时CAN总线通信得以继续进行。在低速/容错CAN网络,每种设备都有它自己的终端。
由于终端的类型不同,因此高速和低速/容错CAN设备不能在同一个网络中使用。
2.低速容错CAN和高速CAN的区别
这两种总线的主要区别在于电平逻辑。可以从以下几种情况来说明:空闲时、有效时、睡眠时、唤醒时。这里假设收发器的电源为标准的5V和12V。
1、空闲时(即通常说的隐性位)
2、有效时(即通常说的显性位)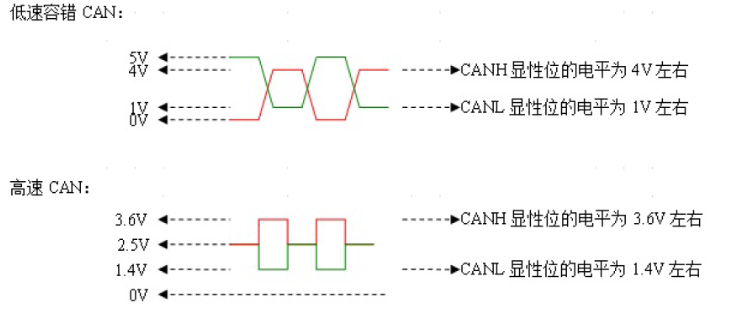
3、睡眠时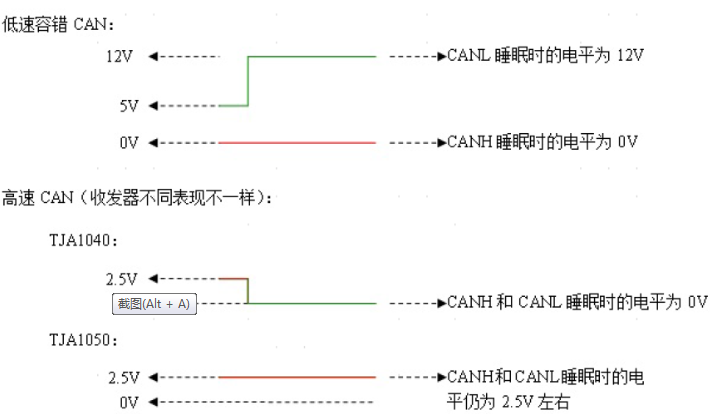
4、唤醒时
3.低速容错CAN和高速CAN电气特性比较
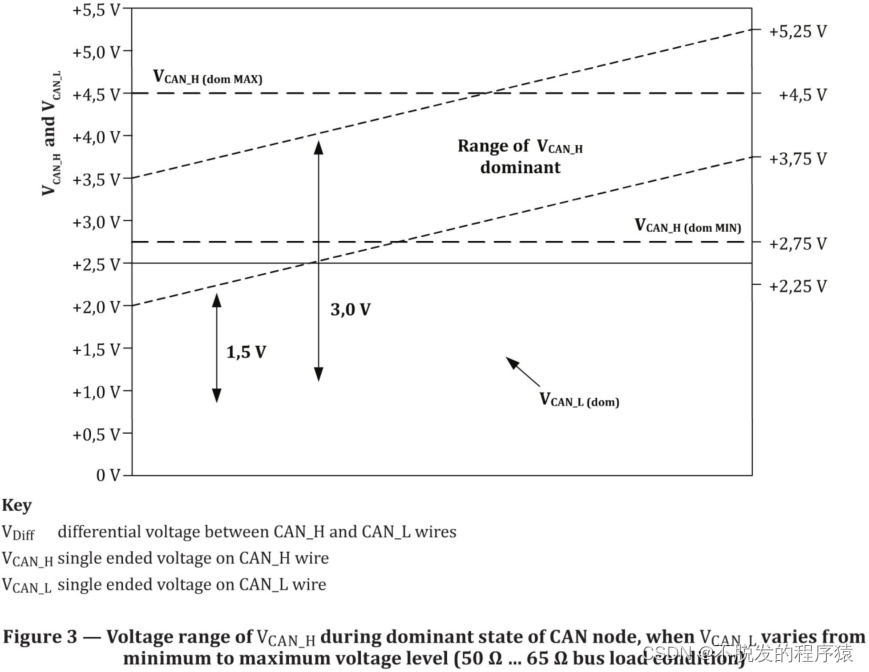
高速CAN总线上为显性电平(逻辑0)时,CAN_H为3.5V、CAN_L为1.5V,此时电压差是2V,显性状态的CAN总线电压范围如下图(标准来源:ISO 11898-2:2006)所示: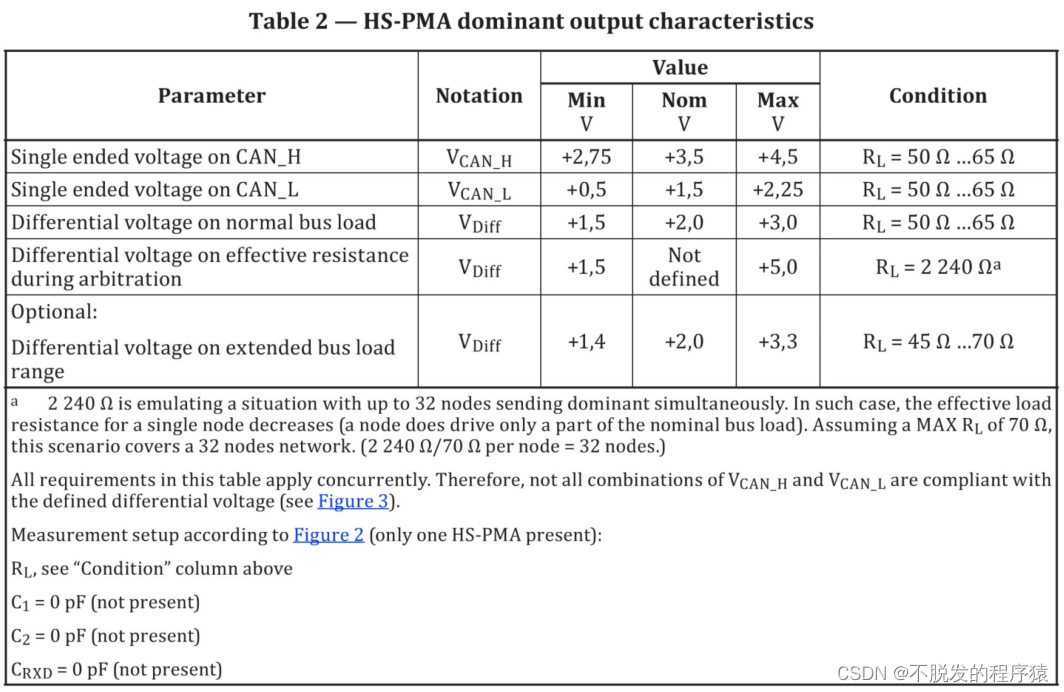
高速CAN总线上为隐性电平(逻辑1)时,CAN_H和CAN_L都为2.5V,此时电压差就是0V,隐性状态的CAN总线电压范围如下图(标准来源:ISO 11898-2:2006)所示: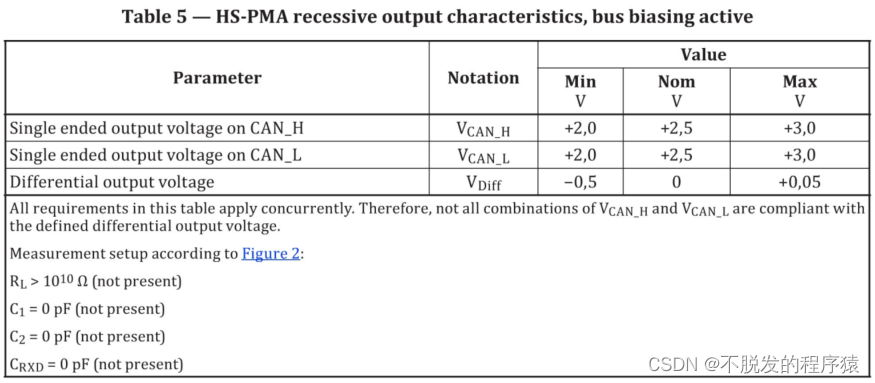
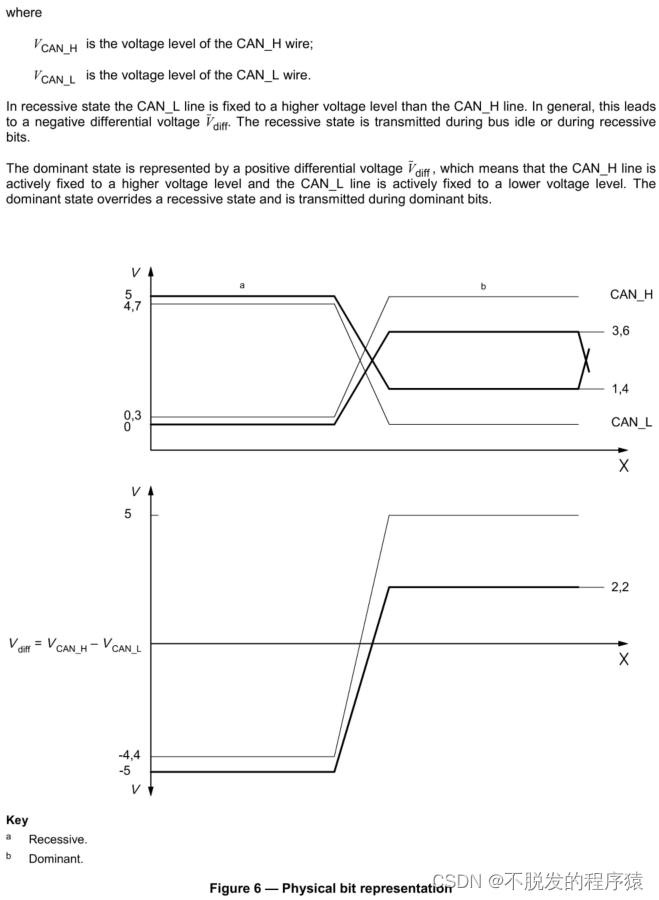
低速CAN总线上为显性电平(逻辑0)时,CAN_H为3.6V、CAN_L为1.4V,此时电压差是2.2V。总线上为隐性电平(逻辑1)时,CAN_H为0.3V、CAN_L都为4.7V,此时电压差就是-4.4V,显性状态和隐性状态的CAN总线电压范围如下图(标准来源:ISO 11898-3:2006)所示:

4.低速容错CAN和高速CAN终端电阻比较
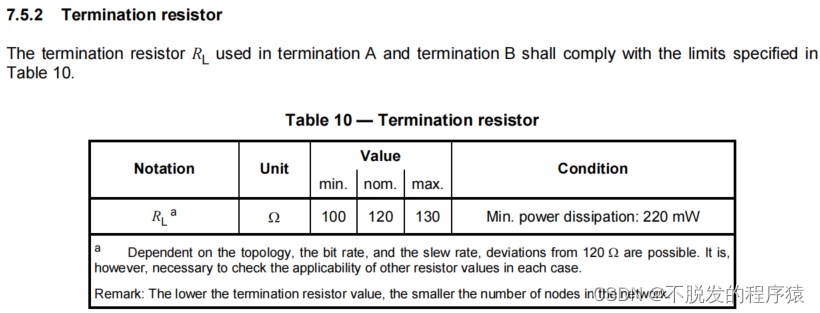
高速CAN线需要在CAN_H和CAN_L加终端电阻,电缆上的终端电阻应与电缆的标称阻抗相匹配,终端匹配电阻一般为120Ω,每个终端电阻应能消耗0.25W的功率(标准来源:ISO 11898-2:2003)。
如果高速CAN传输线路没有终止,线路上的每个信号变化都会导致反射,这可能会导致通信故障。由于通信在CAN总线上双向流动,因此CAN要求终止电缆的两端。然而,这一要求并不意味着每个设备都应该有一个终端电阻。如果沿电缆放置多个设备,只有电缆末端的设备应该有终端电阻。放置终端电阻位置如下所示: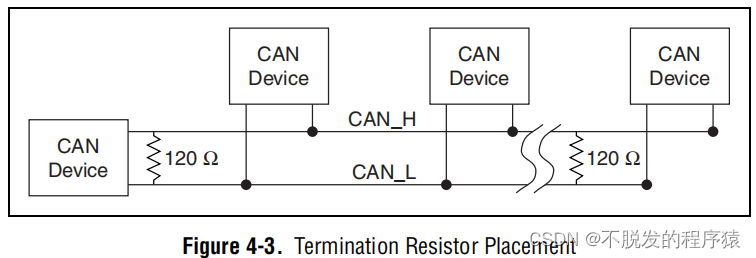
与高速CAN不同,低速CAN需要在低速CAN收发器上终止,而不是在电缆上。该终端需要两个电阻器:RTH用于CAN_H,RTL用于CAN_L。这种配置允许Philips fault-tolerant CAN收发器检测并从总线故障中恢复。 Philips建议低速CAN网络,一个整体的RTH和RTL终端电阻为100Ω到500Ω(每个)。整个网络终端电阻可以确定如下公式:

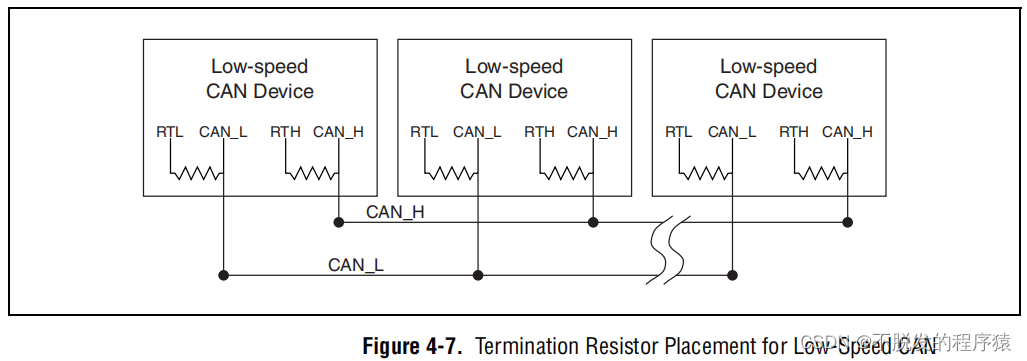
低速CAN网络上的每个设备每条CAN数据线都需要一个终端电阻:RTH用于CAN_H,RTL用于CAN_L,放置终端电阻位置如下所示:
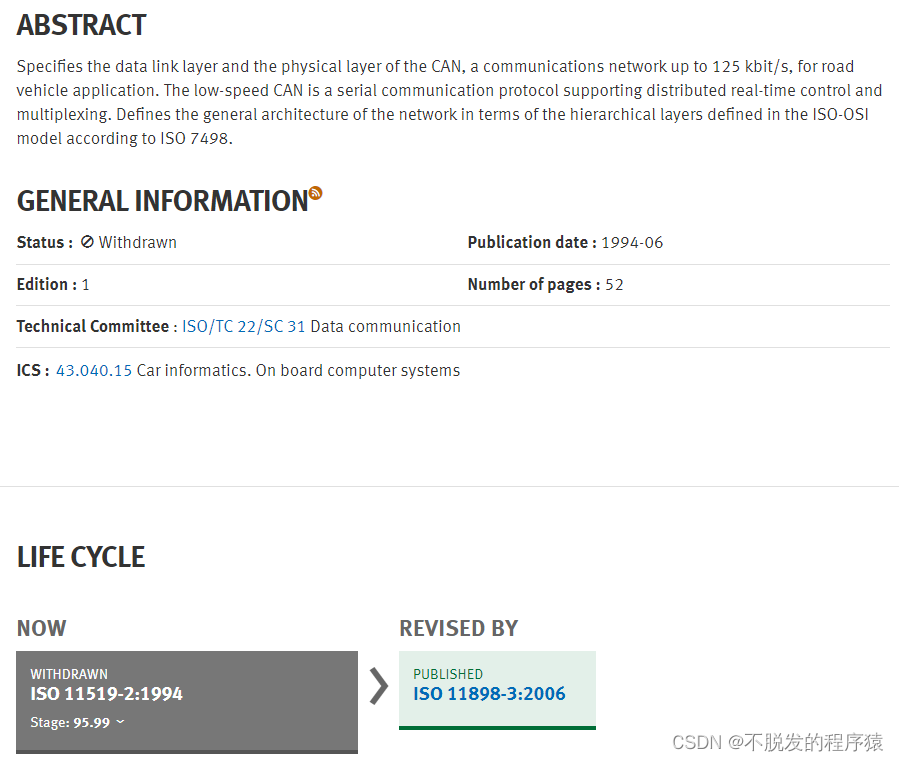
5.补充知识:ISO 11898-3与ISO 11519-2标准的关系
ISO 11519由以下部分组成,总称“道路车辆—低速串行数据通信”:
Part 1:General and definitions 概述和定义 Part 2:Low-speed controller area network (CAN) 低速控制器局域网(CAN) Part 3:Part 3: Vehicle area network (VAN) 车辆局域网(VAN) ISO 11519-2:1994(Low-speed controller area network (CAN), 低速控制器局域网(CAN)),指定CAN的数据链路层和物理层,这是用于公路车辆应用的高达125 Kbit/s的通信网络。低速CAN是一种串行通信协议,支持分布式实时控制和多路复用。根据ISO 7498在ISO-OSI模型中定义的层次结构层中定义网络的一般体系结构。该标准允许在CAN总线连线失败时CAN总线通信得以继续进行。
ISO 11898-3:2006( Road vehicles — Controller area network (CAN) — Part 3: Low-speed, fault-tolerant, medium-dependent interface,道路车辆—控制器局域网(CAN)—第3部分:低速,容错,介质相关的接口),规定了在配备有控制器局域网(CAN)的道路车辆电子控制单元之间以40 Kbit/s至125Kbit/s的传输速率建立数字信息交换的特性。
标准ISO 11519-2-1994已经在2006年被ISO 11898-3-2006代替了,符合标准ISO 11898-3的产品也是支持符合ISO 11519-2标准的产品。
总结
高速CAN和低速CAN的物理层电气特性不一样,因此不能把它们连接在一起
高速CAN主要应用在发动机、变速箱等对实时性、数据传输速度要求高的场合
低速CAN主要应用在对车身控制系统等对可靠性要求高的场合
CAN-H或CAN-L任意一根导线折断,高速CAN节点不能收发,但低速CAN节点可以接受。因此低速CAN的可靠性高于高速CAN,例如在发生事故时CAN线折断一根,车门控制器还可以接收CAN信号开门
低速CAN节点必须连接电源才能正常工作
通用汽车单线CAN(Single Wire CAN)和低速CAN应用一致。
审核编辑:刘清
-
高速信号和低速信号有什么区别,怎么定义高速和低速呢2014-12-18 0
-
can总线的容错can介绍2019-05-24 0
-
高速与容错CAN在数据链路层内容及性能2017-11-13 10137
-
高速CAN,低速CAN和单线CAN有什么区别?详细比较免费下载2018-07-31 10537
-
高速CAN、容错CAN、LIN总线的区别是什么2020-12-06 8119
-
高速CAN总线和低速CAN总线区别分析2022-09-13 3804
-
高速CAN总线和低速CAN总线两者的特性和区别2022-10-12 6694
-
使用 CAN 低速容错的设计注意事项2022-11-14 237
-
高速CAN总线和低速CAN总线的特性2023-04-07 2037
-
低速容错CAN的容错机制介绍2023-05-04 626
-
科普系列:低速容错CAN的容错机制介绍2023-03-06 514
-
高速can和低速can区别2023-12-07 3142
-
容错can和高速can的区别2024-01-05 550
-
高速CAN总线和低速CAN总线的区别2024-02-15 1031
全部0条评论

快来发表一下你的评论吧 !
