

PI调节器介绍及设计
电子说
描述
导读:由现有文献指出,矢量控制的控制性能依赖内环的参数整定,所以本期文章重点分析和介绍常用的几种PI调节器:传统PI调节器、复矢量PI调节器、离散域下的PI调节器和基于MPC设计的PI调节器。
一、PI调节器介绍
1.1原理当不完全了解一个系统和被控对象, 或不能通过有效的测量手段来获得系统参数时,最适合用 PID控制技术。1.1.1 比例 (P) 控制
控制器的输出与输入误差信号成比例关系。偏差一旦产生,控制器立即就发生作用即调节控制输出,使被控量朝着减小偏差的方向变化。
Kp 越大,偏差减小越快。但易引起震荡,在延迟环节较大时,Kp 越小,引起震荡可能性越小,调节速度越慢。单纯的比例控制存在稳态误差不能消除。
1.1.2 积分 (I) 控制
控制器的输出与输入误差信号的积分成正比关系。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。
但积分 I 有 90 度的相位滞后,这会减小相位裕度,常见的结果是超调和震荡。
比例 + 积分 (PI) 控制器,可以使系统在进入稳态后无稳态误差。
性能影响:
积分控制可以增强系统抗高频干扰能力。故可相应增加开环增益,从而减少稳态误差。但纯积分环节会带来相角滞后,减少了系统相角裕度。
1.1.3 PI调节器分类
a)位置式PI电流调节器
PI 调节器的输出直接控制执行机构。这种算法的优点是计算精度比较高,缺点是每次都要对 e(k)进行累加,很容易出现积分饱和的情况,由于位置式 PI 调节器直接控制的是执行机构,积分一旦饱和就会引起执行机构位置的大幅度变化,造成控制对象的不稳定。
b)增量式PI电流调节器
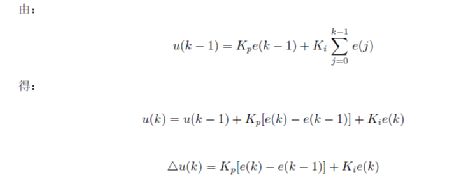
增量式 PI 算法与位置式 PI 算法并没有本质的区别,只是增量式 PI 算法控制的是执行机构的增量 △u(k),这种算法的优点在于:由于输出的是增量,因此计算错误时的产生的影响较小,控制量的确定仅与最近几次偏差采样值有关,运算量相对较小。这种算法的缺点在于:每次计算 △u(k) 再与前次的计算结果 u(k -1) 相加得到本次的控制输出。
这就使得 △u(k) 的截断误差被逐次的累加起来,输出的误差加大。当采用增量式算法时必须尽量减小定点运算带来的截断误差,否则,每一次运算的截断误差将会逐次累积,使系统的控制精度变差,造成系统的静态误差。
二、PI调节器设计
2.1传统PI电流调节器
传统PI电流调节器如公式(1)所示,对d、q轴电流进行分别调节。
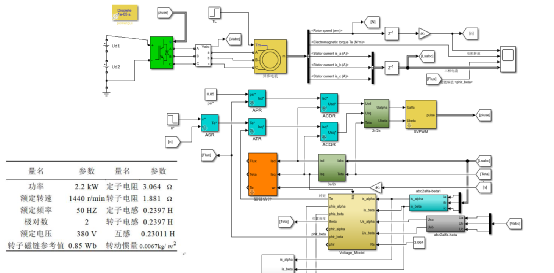
图1 传统PI电流调节器
图2 传统PI电流调节器q轴电流阶跃响应
基于传统PI电流调节器的FOC中q轴电流阶跃响应虽然具有较快的上升速度但超调量很大。
2.2复矢量PI电流调节器
传统的线性 PI 调节器将电流内环分离成 d、q 轴两个控制环,由于两个环路之间存在交叉耦合项并不能实现完全独立设计。而复矢量调节器将 d、q轴的电流环当作一个整体,与传统方法相比具有更优的控制性能和参数鲁棒性。
将电机数学模型的状态方程中的反电动势项略掉后进行拉普拉斯变换,得到定子电流到电压的传递函数如式(2)所示。
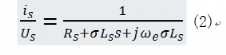
根据公式(2),可以设计复矢量调节器如式(3).

图(3)是基于复矢量调节器的电流环的控制框图。
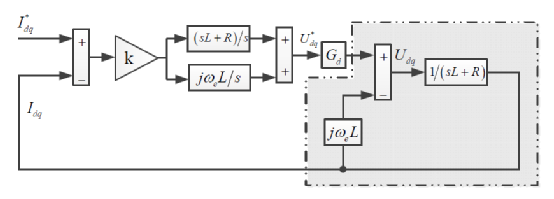
图3 基于复矢量调节器的控制框图
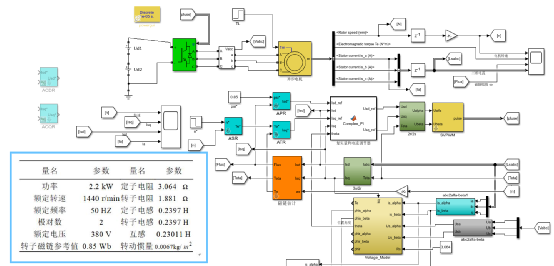
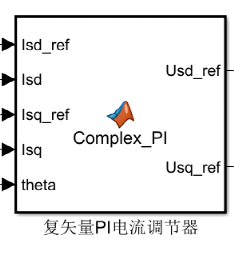
图4 复矢量PI电流调节器
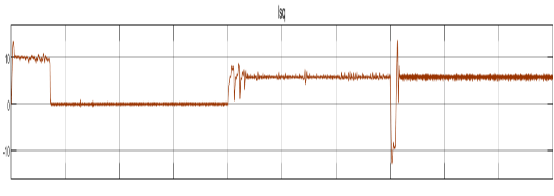
图5 复矢量PI电流调节器q轴电流阶跃响应
基于复矢量PI电流调节器的FOC中q轴电流相比较于基于传统PI电流调节器的动态效果要好一些,稳态时的谐波也更小一些。三、基于不同PI时的FOC波形对比分析
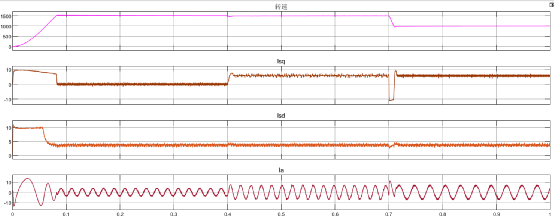
(a)传统PI电流调节器
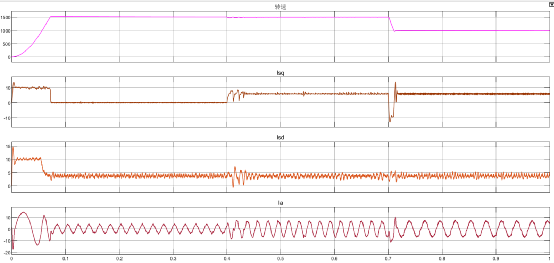
(b)复矢量PI电流调节器
图6 各工况下的运行仿真情况
从图6可以看出,在突加、减负载时,q 轴电流能迅速跟踪指令值,电机转速略有变化后很快恢复至稳定值,同时 d 轴电流基本维持恒定,验证了复矢量PI电流调节器的有效性。
四、总结
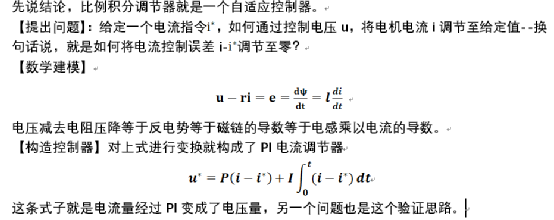
4.1对PI电流调节器的思考
为什么电压量自经过PID控制器就变成电流量?电流量自经过PID控制器就变为电压量?
4.2小结
未考虑改变电机参数和其他特殊的运行方式时,两种调节器在仿真中的性能区别不是很大。但是总体上而言,复矢量PI调节器不像传统 PI 调节器那样将两个电流环分开考虑,所以复矢量PI调节器的结构要简单很多。
-
PI控制器的介绍2021-08-27 0
-
FOC电机控制中的PI调节器2021-08-27 0
-
一种新的PI调节器在交流解耦控制系统中的应用2009-11-01 485
-
PI调节器电路2009-02-25 8275
-
简易平均值PI调节器的设计2011-12-15 913
-
一种新型交流PI调节器及其在逆变电源中的应用2016-03-31 872
-
pi调节器原理_pi调节器电路图_pi调节器参数作用2017-08-03 76110
-
pi调节器的输入和输出_pi调节器的传递函数2017-08-03 61819
-
简易平均值PI调节器的设计方案解析2017-12-08 1176
-
PI电流调节器的工作原理和种类2022-09-19 6654
-
PI调节器的概念及设计2023-02-28 12605
-
离散域下PI调节器设计学习与实现2023-06-16 1047
-
串联型PI和并联型PI调节器的比较2023-07-16 2164
-
pi调节器p和i都是什么 pi调节器参数怎么整定2023-08-01 9662
全部0条评论

快来发表一下你的评论吧 !
