

51单片机应用_超声波&定时器
电子说
1.2w人已加入
描述
前言
通过利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。
HC-SR04模块
**HC-SR04超声波模块常用于机器人避障、物体测距、液位检测、公共安防、停车场检测等场所。HC-SR04超声波模块主要是由两个通用的压电陶瓷超声传感器,并加外围信号处理电路构成的。
参数:
| Operating Voltage | Dc5V |
|---|---|
| Operating Current | 15ma |
| Operating Frequency | 40KHz |
| Max Range | 4m |
| Min Range | 2cm |
| Ranging Accuracy | 3mm |
| Measuring Angle | 15° |
| Trigger Input Signal | 10µS TTL脉冲 |
| Dimension | 45 x 20 x 15 |
控制流程
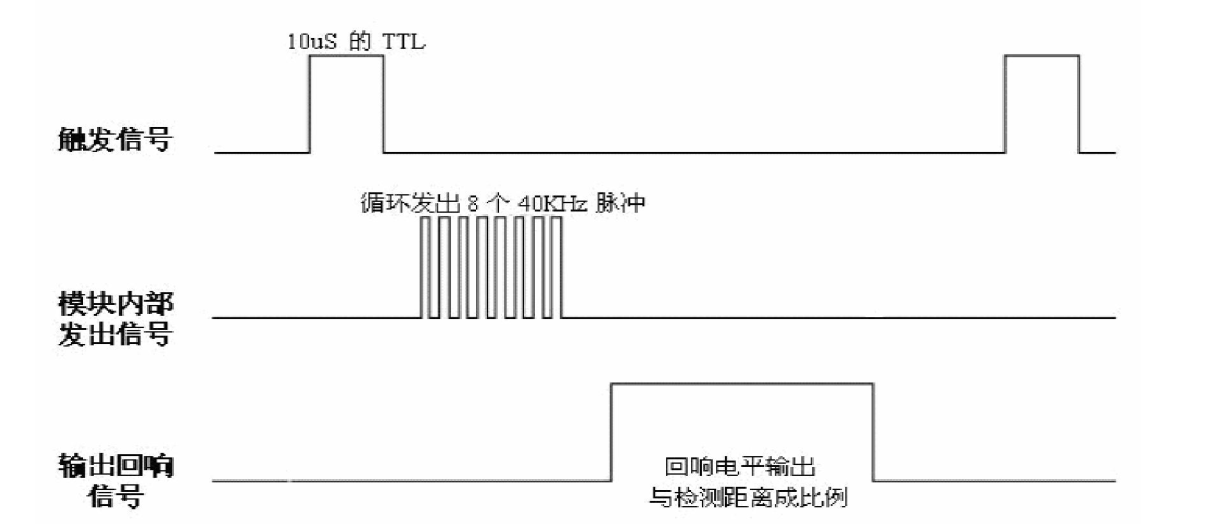
- 通过Trig引脚发一个 10US 以上的高电平,模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
- 有信号返回时,Echo有高电平输出,高电平时间即是超声波往返时间。
- 测试距离 = (高电平时间 *声速)/2
通过单片机的定时器获得计时功能来获得检测距离,开启定时器后TH和TL寄存器数值会自动增加。直到关闭定时器,再读出其中的数值即可计算距离。
/*开始计时*/
while (!ECHO);//当ECHO为高电平的时候,跳出循环,并开始记录时间
TR0 = 1;//启动定时器0,开启计时
while (ECHO);//ECHO不为0,即脉冲返回结束,计时结束
TR0 = 0;//停止计时,此时的ECHO的高电平时间就是 超声波发出到重新返回接收所用的时间
代码
#ifndef _HC_SR04_H_
#define _HC_SR04_H_
#include #include "HC_SR04.h"
/*******************************************************************************
** 函数名称: HC_SR04_Init
** 功能描述: 初始化定时器0,用以记录从发射到返回的时间Time
** 参数说明: void
** 返回说明: void
** 创建人员: Main
** 创建日期: 2020-06-01
**------------------------------------------------------------------------------
** 修改人员:
** 修改日期:
** 修改描述:
**------------------------------------------------------------------------------
********************************************************************************/
void HC_SR04_Init(void)
{
TMOD |= 0x01;
TH0 = 0;
TL0 = 0;
ET0 = 1; //允许T0中断,可关闭,只有特别大的才开
EA = 1;
TRIG = 0; //先使启动端置低,等待高电平启动
}
/*******************************************************************************
** 函数名称: HC_SR04
** 功能描述: 返回测量距离
** 参数说明: void
** 返回说明: 测量距离,单位(cm)
** 创建人员: Main
** 创建日期: 2020-12-22
**------------------------------------------------------------------------------
** 修改人员: Main
** 修改日期:
** 修改描述:
**------------------------------------------------------------------------------
********************************************************************************/
unsigned int HC_SR04(void)
{
unsigned int distance;//用于记录测得的距离
unsigned int time;//用于记录超声波发出到重新返回接收所用的时间
/*启动HC_SR04*/
TRIG = 1;//升高电平,打开触发信号
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
TRIG = 0;
/*开始计时*/
while (!ECHO);//当ECHO为高电平的时候,跳出循环,并开始记录时间,当为低电平时卡住不动
TR0 = 1;//启动定时器0,开启计时
while (ECHO);//ECHO不为0,即脉冲返回结束,计时结束
TR0 = 0;//停止计时,此时的ECHO的高电平时间就是 超声波发出到重新返回接收所用的时间
/*计算时间及距离*/
time = (TH0 * 256 + TL0) * 1.29; //可改变此数据来提高精确度
distance = (time * 0.034) / 2; //单位是cm,0.34是mm
TH0 = 0; //清零,进行下一次测距
TL0 = 0;
//返回距离
return distance;
}
/*******************************************************************************
** 函数名称: T0_Time_Sr04
** 功能描述: 超出测量距离的异常
** 参数说明: None
** 返回说明: void
** 创建人员: Main
** 创建日期:
**------------------------------------------------------------------------------
** 修改人员:
** 修改日期:
** 修改描述:
**------------------------------------------------------------------------------
********************************************************************************/
void T0_Time_Sr04() interrupt 1
{
HC_SR04_flag = 1;
//TI=1;
//printf("超出距离");
//TI=0;
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于51单片机的超声波测距系统2011-03-25 0
-
基于SLH89F5162的单片机超声波测距器设计2013-10-18 0
-
一个定时器控制两个超声波2015-01-31 0
-
超声波单片机超声波单片机超声波单片机超声波单片机超声波单片机超声波2016-04-14 0
-
求51单片机的超声波程序2017-07-08 0
-
基于51单片机的超声波测距设计与实现2020-04-24 0
-
怎样去设计一种基于51单片机的超声波避障小车2021-07-20 0
-
如何去设计一种STM32单片机的高精度超声波测量系统2021-12-06 0
-
最简单的51超声波测距程序分享2022-01-24 0
-
51单片机超声波控制舵机转向的创意制作资料2023-09-26 0
-
基于51单片机超声波测距设计2016-05-11 903
-
51单片机计数器与定时器的区别2022-05-12 458
-
51单片机内部定时器的使用2021-11-12 375
-
51单片机超声波测距(数码管显示)2021-11-12 633
-
51单片机定时器及其应用(3)(测量脉冲频率)2021-11-23 548
全部0条评论

快来发表一下你的评论吧 !
