

 相位式激光测距仪全套方案
相位式激光测距仪全套方案
电子说
描述
描述:
相位式激光测距仪与脉冲式激光测距仪功能是一样的,都是为了测距,但是应用的原理却不一样。相位法原理:从物体反射的辐射被光电探测器接收,其相位与来自激光的参考信号的相位进行比较。波传播中存在延迟会产生相移,由测距仪测量。
距离由以下公式确定:

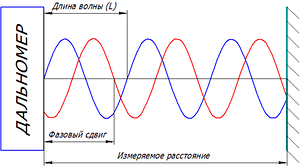
其中c是光速,f是激光的调制频率,phi是相移。
这个公式只有在到物体的距离小于调制信号波长的一半时才有效,这等于c/2f.
如果调制频率为10MHz,那么测得的距离可以达到15米,当距离从0到15米变化时,相位差将从0到360度变化。在这种情况下,将相移改变1度对应于物体的运动约4厘米,
当超过该距离时,会产生模糊性 - 无法确定测量距离中适合多少波周期。为了解决歧义,切换激光器的调制频率,然后求解所得方程组。
最简单的情况是使用两个频率,在低频下大致确定到物体的距离(但最大距离仍然有限),在高频率下确定距离以期望的精度-与测量相移的精度相同,当使用高频时,测量距离的精度会明显更高。
由于有相对简单的方法可以高精度地测量相移,因此在这种测距仪中测量距离的精度可以达到0.5 mm.这是测距仪中使用的相位原理,需要高精度的测量仪 - 大地测量仪,激光卷尺测量仪,安装在机器人上的扫描测距仪。然而,该方法有缺点 - 持续工作的激光器的辐射功率明显小于脉冲激光器的辐射功率,这不允许使用相位测距仪来测量长距离。此外,以所需精度测量相位可能需要一些时间,这限制了设备的速度。激光测距仪(Laser rangefinder)是利用激光的飞行时间(ToF)实现对目标距离测量的仪器,可以满足日常生活和工业自动化等基本测量要求,例如距离测量、面积测量、体积测量、高度追踪等。
方案:
本套方案包含原理图+pcb+源代码+光学部分资料+元件供应商+bom+调试指南等。激光测量比超声波测量更加精准,且较不易受到外界干扰,但需要复杂且快速的计算,因此需搭配32位Arm Cortex-M0+核心的STM32F030C8T6 MCU。
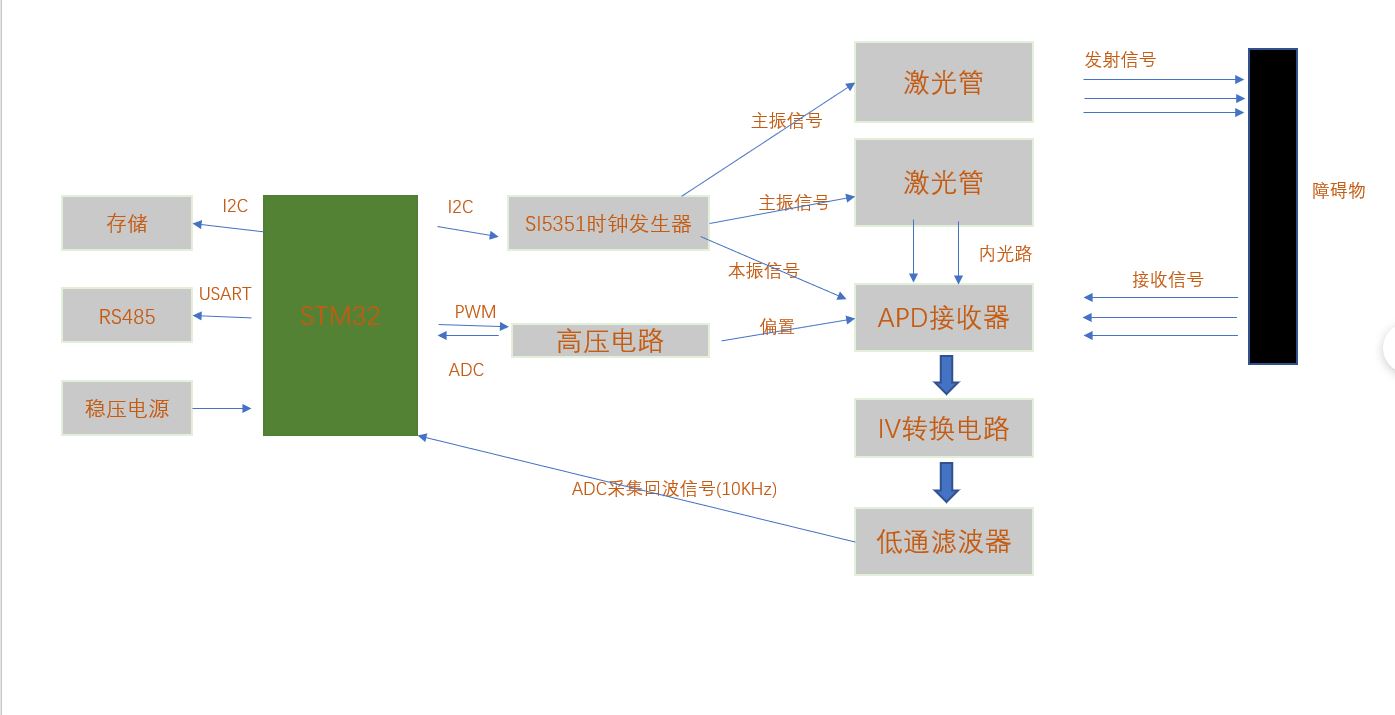
图1. 激光测距原理框图
方案采用相位法,测量激光往返所産生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离,即用间接方法测定出光往返测线所需的时间,理论测量精度可达到mm量级。
本方案采用3.3V电源供电,精度+-1.5mm,量程0.2m~60m,带TTL/RS485接口。
硬件设计
激光测距仪由主控板、激光接收板和光学部分组成,主控板MCU爲STM32F030C8T6,负责控制激光发射与接收,并计算出测距仪与物体之间的距离,激光接收板主要负责激光回波信号的接收与放大,将放大后的信号送回主控MCU。本激光测距仪采用相位测量法,因此使用两颗激光发射头(内、外光路),并由同一接收头接收激光的回波信号,通过内、外两路不同的激光信号相位差可推算出测距仪与物体之间的距离,当测距仪与物体之间距离较短时,内、外光路的相位差值较小,反之若物体较远时,内、外光路的相位差值会增加。相位计算需使用到快速傅里叶变换(FFT算法已集成在软件工程里面),并使用多个不同频率对同一距离的待测物进行测量,才可取得准确的距离。
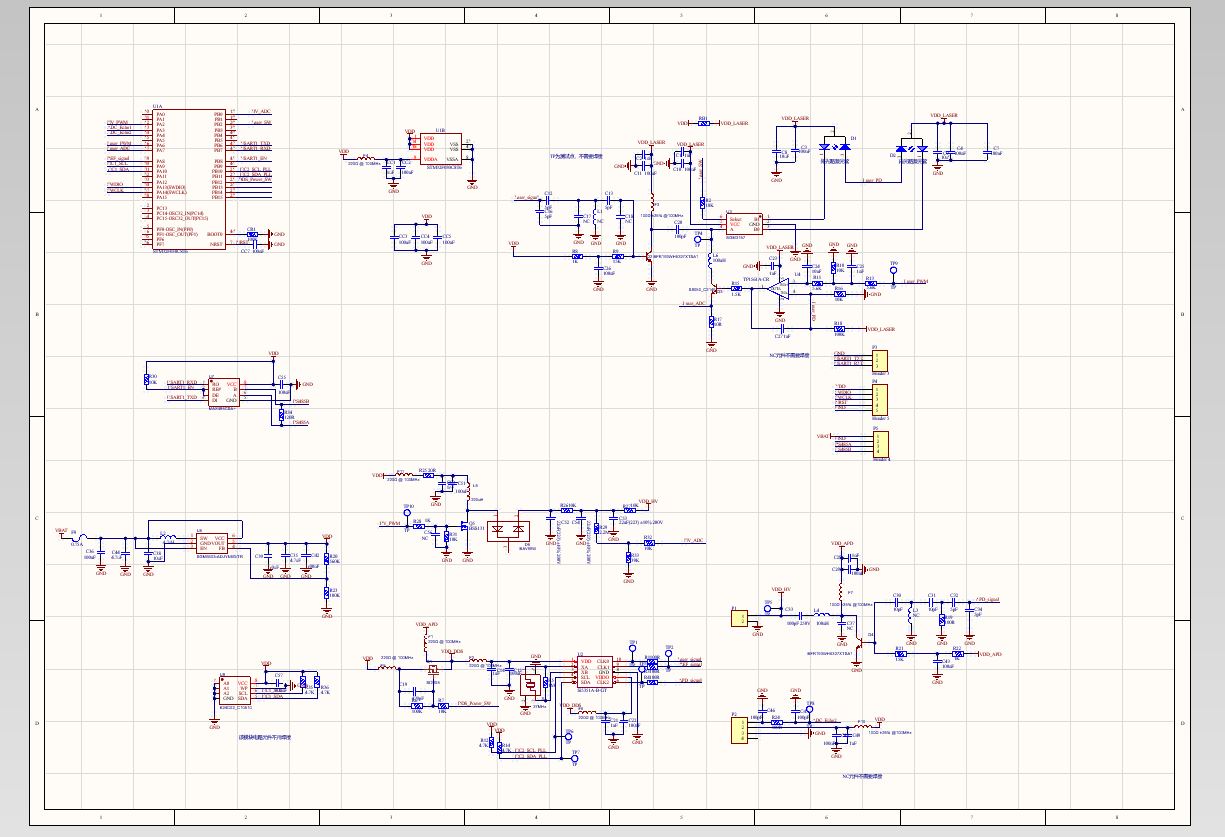
图2发射板原理图
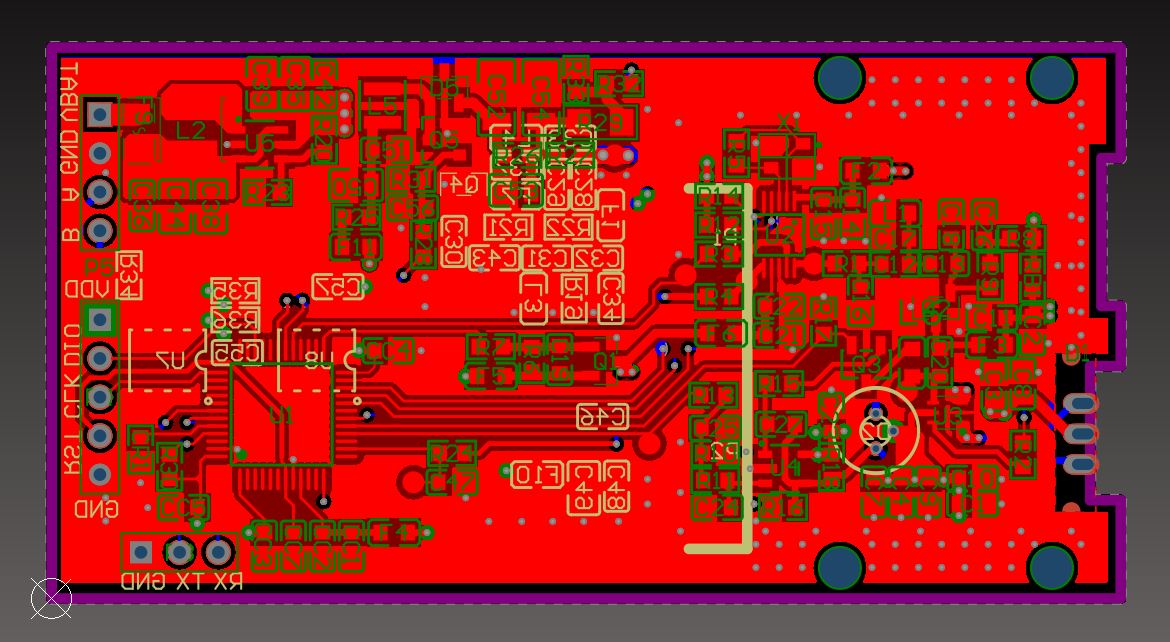
图3发射板PCB正面
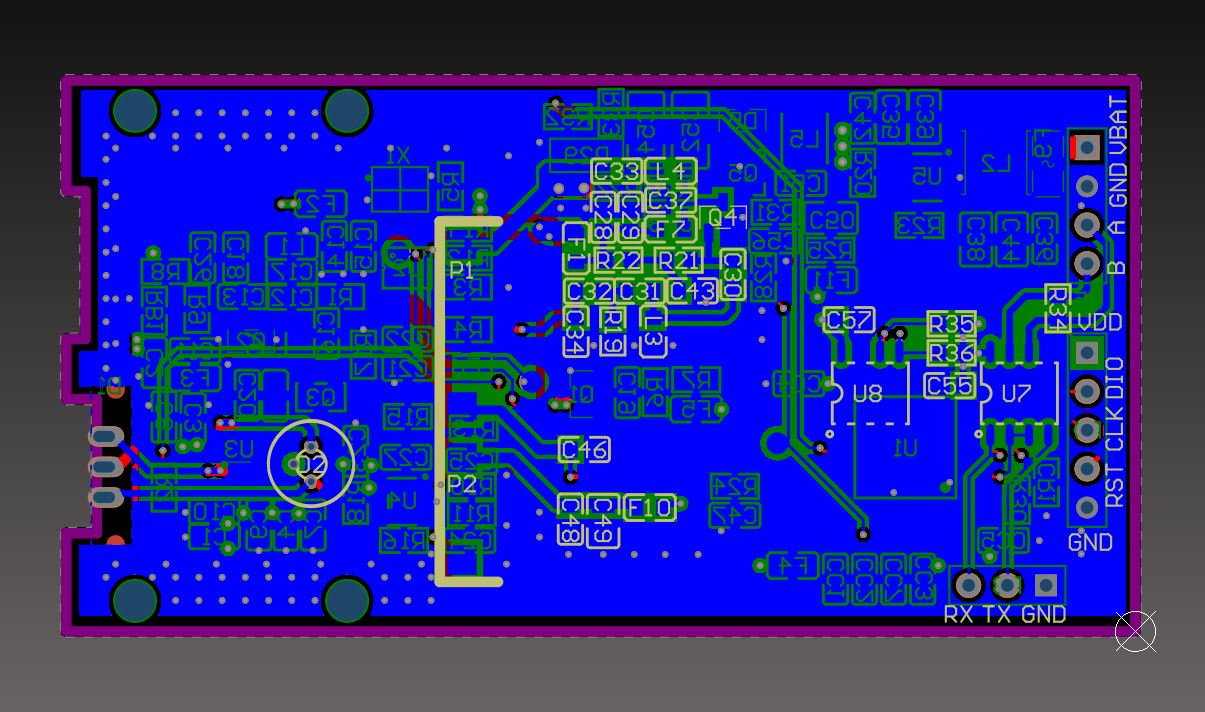
图4发射板PCB反面
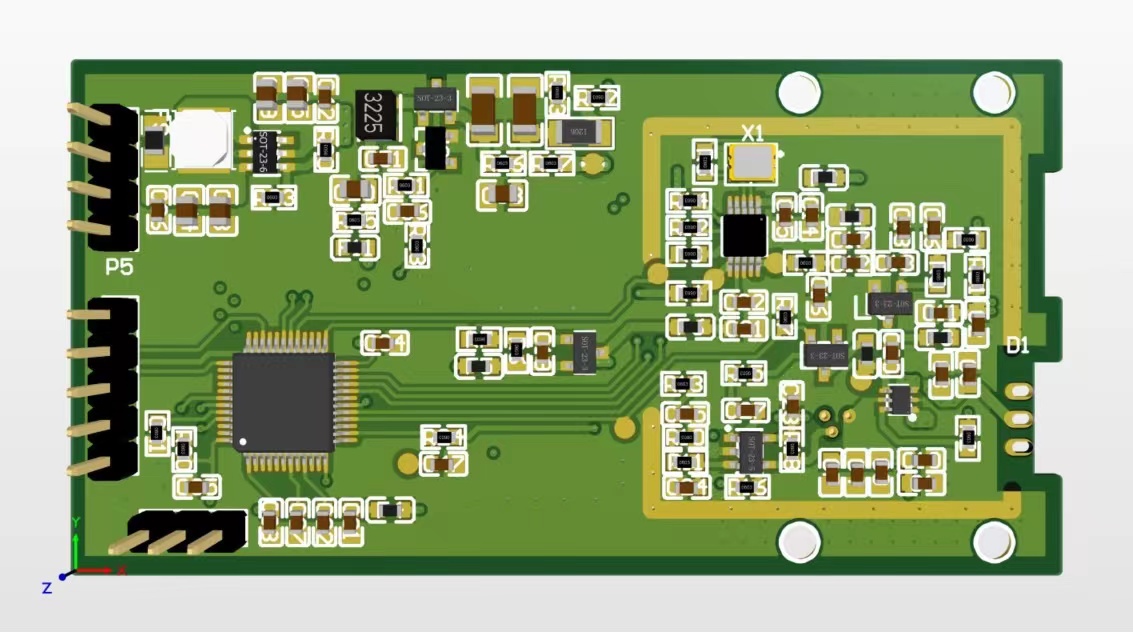
图5发射板3D效果图正面
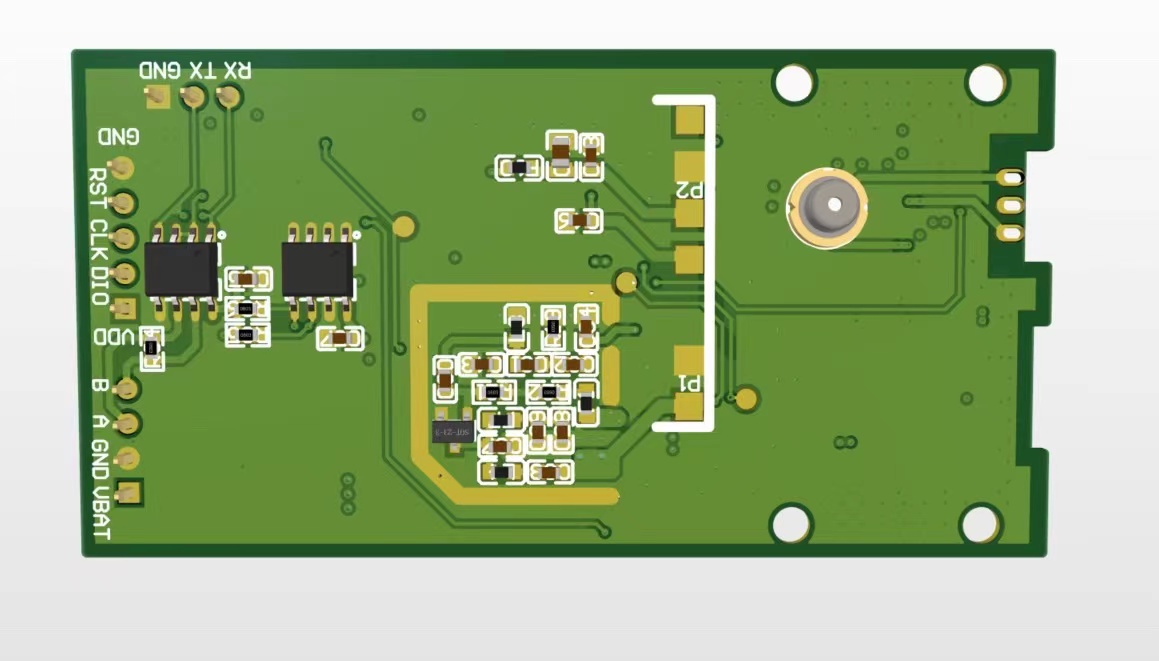
图6发射板3D效果图反面
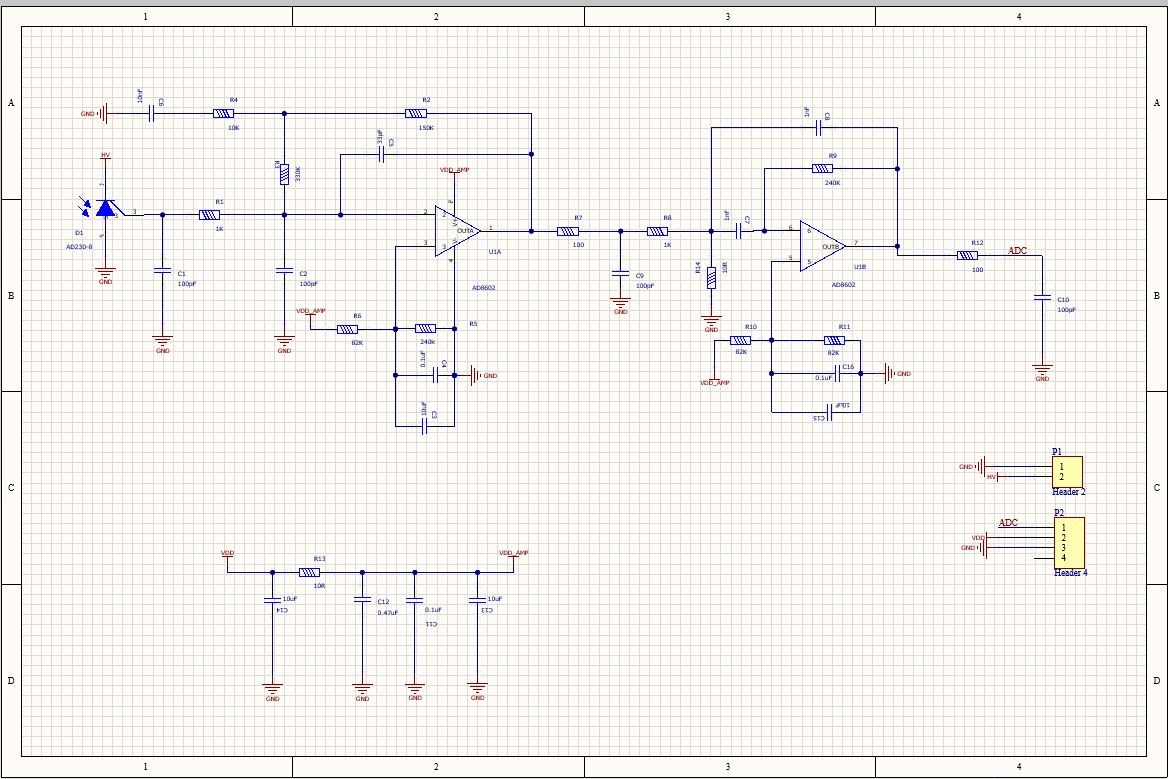
图7接收板原理图
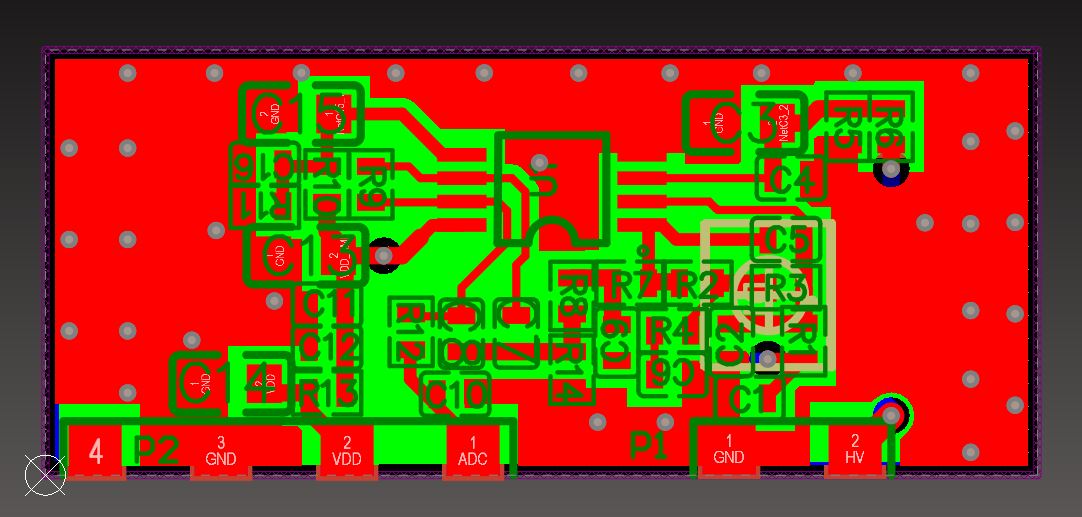
图8接收板PCB
图9光学结构架子
审核编辑 黄昊宇
-
基于MSP43O单片机的激光测距仪控制器开发2011-03-07 0
-
激光测距仪2013-04-14 0
-
DIY相位激光测距仪 (详解) 51单片机2015-07-13 0
-
激光测速测距仪的测量原理是什么?2015-09-03 0
-
【秀秀资源】+有关激光测距仪方面的资料2017-02-22 0
-
2W开发费用求手持式激光测距仪方案2017-03-11 0
-
激光测距仪的原理、使用方法以及日常维护2018-01-31 0
-
求助:手持式激光测距仪测量时的干扰有哪些??2018-04-19 0
-
望远镜测距仪的原理是什么?2020-03-25 0
-
激光测距仪基本知识2009-12-25 1324
-
激光测距仪的原理和应用2010-03-02 9584
-
相位式激光测距仪的改进设计2017-01-02 1009
-
DDS技术在数字激光相位测距仪中的应用2017-01-31 752
-
激光测距仪的发展状况如何及激光测距的开发资料概述2018-11-15 1772
-
激光测距仪的原理_激光测距仪是怎样工作的2019-11-08 10114
全部0条评论

快来发表一下你的评论吧 !
