

【飞凌RZ/G2L开发板试用体验】SSH登录核心参数测试,PWM驱动编码器电机
描述
本文来源电子发烧友社区,作者:马猛, 帖子地址:https://bbs.elecfans.com/jishu_2309828_1_1.html
SSH登录首先设定板子的IP地址,OK-G2LD-C 开发板支持 SSH 服务并启动时已自动开启,设置好 IP 地址后就可以作为一台SSH 服务器。可以利用 SSH 登录开发板进行开发调试,也可用 scp 进行文件传输。
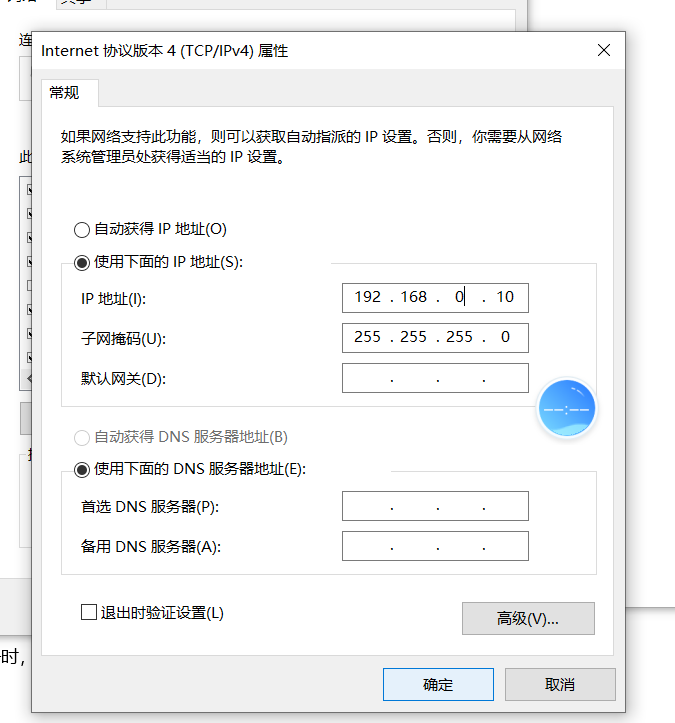
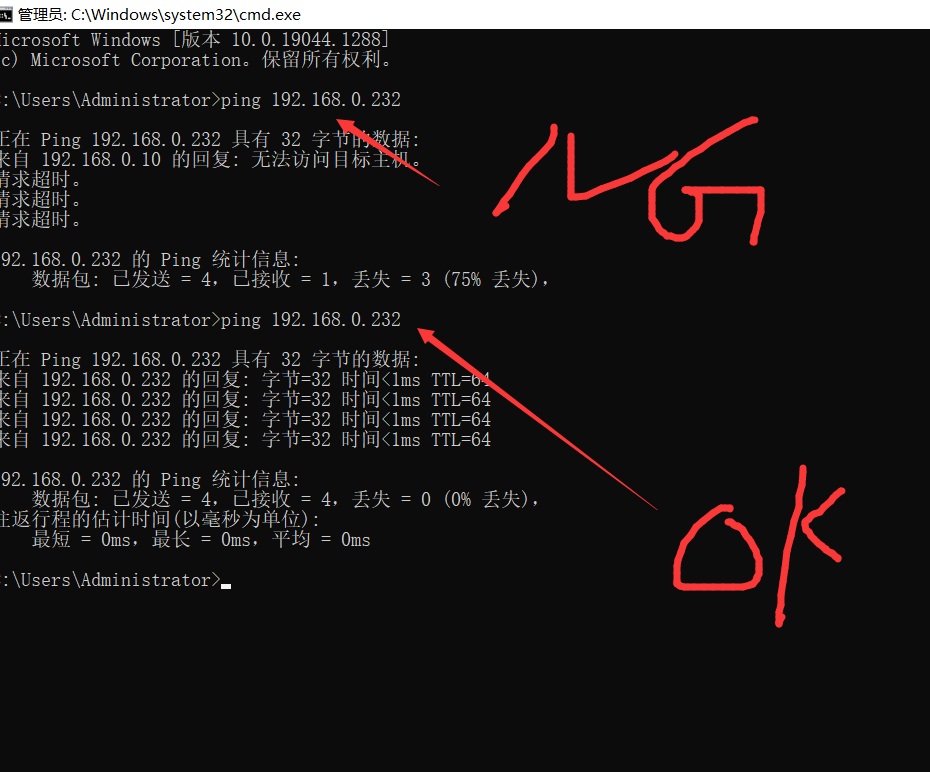
开发板有两个网口ENT0,ENT1:不要搞混了,首先和电脑ping .
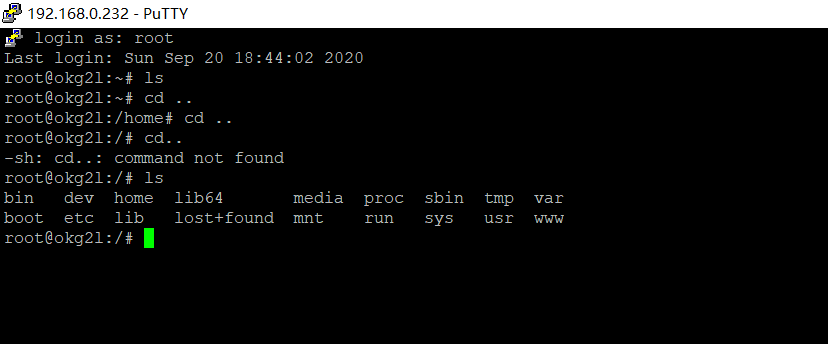
查看linux根目录
1 LED测试:
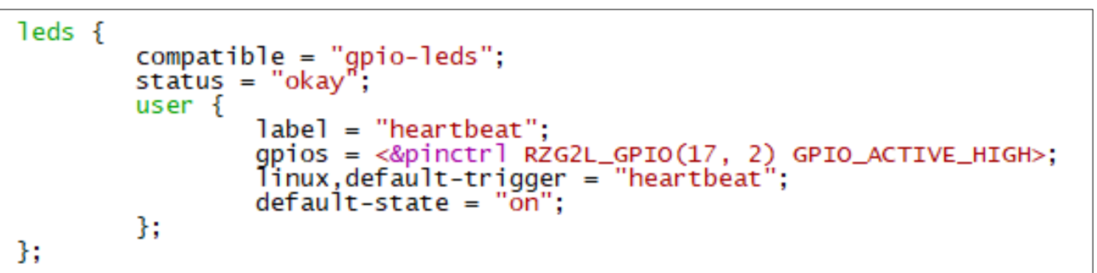
1) OK-G2LD-C 核心板有 1 个蓝色可控 LED 灯,板卡上电启动后该蓝色 LED 灯闪烁。若用户关闭该功
能, 需要修改源码中的设备树文件: OKG2L-linux-sdk10/OKG2L-linux-kernel/arch/ARM64/boot/dts/renes
as/OKG2L-C.dtsi,将 leds 节点属性 state=”on”改为”off”, linux,default-trigger = "heartbeat"改为”none”
2) LED : 用户控制
当将 led 的触发条件设置为 none 后,用户可以通过命令来控制 led 灯亮灭。
复制代码
3)将蓝色 LED 灯改为心跳灯
复制代码
2 GPIO PWM 测试
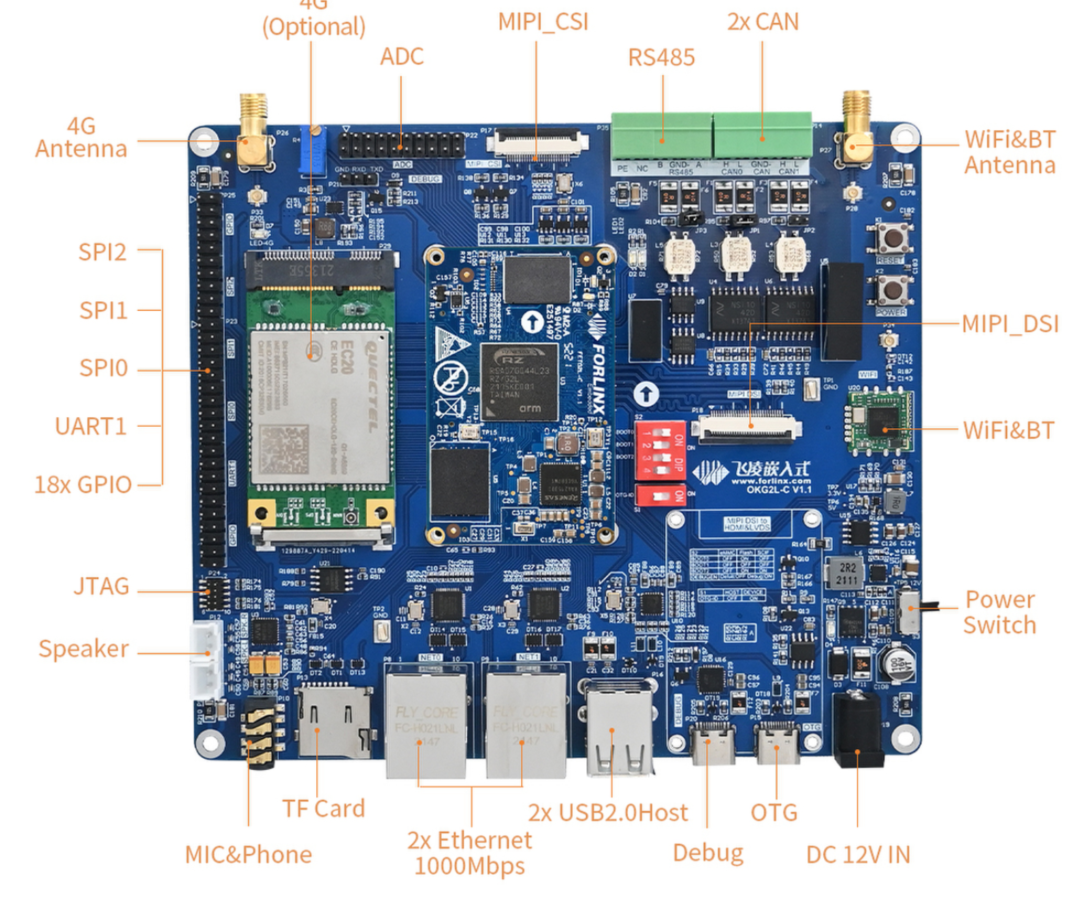
OK-G2LD-C 底板在 P23 ,P25 引出 gpio, 根据原理图标识的引脚名称,使用 sysfs 方式控制 gpio,设
置 gpio 输出电平高低。 (此原理图对应底板的 P25 丝印, 1 脚对应底板丝印小三角)
gpio 编号计算方式: GPIO_ID = GPIO_port * 8 + GPIO_pin + 120
例如引脚 P17_1 对应的 gpio 编号为 17*8+1+120=257;
目的:将一个小舵机直接连接到开发板的5伏电源上,并使用GPIO数字输出端口采用软件PWM的方式来控制它。警告:只能使用微型舵机(如:SG90),因为开发板5 V供电的限制,大型号的舵机电流过大对控制板安全不利。
连接舵机的棕色线(或黑色线)至开发板的 GND (pin #6), 舵机红色线至开发板的 5 V (pin #2),舵机黄色线连接至开发板的任意 GPIO 输出端口. 此时舵机由开发板的 5 V供电, GPIO的控制电压是 3.3 V。(开发板引脚可参见:开发板的外部I/O接口)当然我们也可以使用充电宝给舵机供电。
复制代码
打开APP阅读更多精彩内容
SSH登录首先设定板子的IP地址,OK-G2LD-C 开发板支持 SSH 服务并启动时已自动开启,设置好 IP 地址后就可以作为一台SSH 服务器。可以利用 SSH 登录开发板进行开发调试,也可用 scp 进行文件传输。
开发板有两个网口ENT0,ENT1:不要搞混了,首先和电脑ping .
查看linux根目录
1 LED测试:
1) OK-G2LD-C 核心板有 1 个蓝色可控 LED 灯,板卡上电启动后该蓝色 LED 灯闪烁。若用户关闭该功
能, 需要修改源码中的设备树文件: OKG2L-linux-sdk10/OKG2L-linux-kernel/arch/ARM64/boot/dts/renes
as/OKG2L-C.dtsi,将 leds 节点属性 state=”on”改为”off”, linux,default-trigger = "heartbeat"改为”none”
2) LED : 用户控制
当将 led 的触发条件设置为 none 后,用户可以通过命令来控制 led 灯亮灭。
- root@okg2l:/# echo none > /sys/class/leds/heartbeat/trigger //设置触发条件为 none
- root@okg2l:/# echo 1 > /sys/class/leds/heartbeat/brightness //点亮 led 灯
- root@okg2l:/# echo 0 > /sys/class/leds/heartbeat/brightness //熄灭 led 灯
3)将蓝色 LED 灯改为心跳灯
- echo heartbeat > /sys/class/leds/heartbeat/trigger //设置触发条件为 heartbeat
2 GPIO PWM 测试
OK-G2LD-C 底板在 P23 ,P25 引出 gpio, 根据原理图标识的引脚名称,使用 sysfs 方式控制 gpio,设
置 gpio 输出电平高低。 (此原理图对应底板的 P25 丝印, 1 脚对应底板丝印小三角)
gpio 编号计算方式: GPIO_ID = GPIO_port * 8 + GPIO_pin + 120
例如引脚 P17_1 对应的 gpio 编号为 17*8+1+120=257;
目的:将一个小舵机直接连接到开发板的5伏电源上,并使用GPIO数字输出端口采用软件PWM的方式来控制它。警告:只能使用微型舵机(如:SG90),因为开发板5 V供电的限制,大型号的舵机电流过大对控制板安全不利。
连接舵机的棕色线(或黑色线)至开发板的 GND (pin #6), 舵机红色线至开发板的 5 V (pin #2),舵机黄色线连接至开发板的任意 GPIO 输出端口. 此时舵机由开发板的 5 V供电, GPIO的控制电压是 3.3 V。(开发板引脚可参见:开发板的外部I/O接口)当然我们也可以使用充电宝给舵机供电。
- # Software PWM Servo.py
- import RPi.GPIO as GPIO
- import time
- P_SERVO = 22 # GPIO端口号,根据实际修改
- fPWM = 50 # Hz (软件PWM方式,频率不能设置过高)
- a = 10
- b = 2
- def setup():
- global pwm
- GPIO.setmode(GPIO.BOARD)
- GPIO.setup(P_SERVO, GPIO.OUT)
- pwm = GPIO.PWM(P_SERVO, fPWM)
- pwm.start(0)
- def setDirection(direction):
- duty = a / 180 * direction + b
- pwm.ChangeDutyCycle(duty)
- print "direction =", direction, "-> duty =", duty
- time.sleep(1)
- print "starting"
- setup()
- for direction in range(0, 181, 10):
- setDirection(direction)
- direction = 0
- setDirection(0)
- GPIO.cleanup()
- print "done"
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
飞凌嵌入式之瑞萨G2L核心板及开发板开箱体验2022-06-08 0
-
G2L系列 核心板 -RZ/G2L 处理器简介|框架图|功耗|原理图及硬件设计指南2022-06-21 0
-
【飞凌RZ/G2L开发板试用体验】+开箱测评2022-07-25 0
-
【飞凌RZ/G2L开发板试用体验】第一篇 飞凌RZ/G2L开发板初体验2022-07-26 0
-
【飞凌RZ/G2L开发板试用体验】01、OK-G2LD-C开箱与入门讲解2022-08-04 0
-
【飞凌RZ/G2L开发板试用体验】开箱帖子,飞凌质量YYDS2022-08-15 0
-
【飞凌RZ/G2L开发板试用体验】+01.开箱(zmj)2022-08-28 0
-
【飞凌RZ/G2L开发板试用体验】+02.开发环境体验(zmj)2022-08-28 0
-
【飞凌RZ/G2L开发板试用体验】+04.RZ/V2L开发板的温度测试(zmj)2022-08-28 0
-
【飞凌RZ/G2L开发板】飞凌RZ/G2L开发板试用测评报告2022-08-29 0
-
【飞凌RZ/G2L开发板试用体验】+07.RZ/V2L开发板的Camera测试(zmj)2022-09-06 0
-
【飞凌RZ/G2L开发板试用体验】+08.RZ/V2L开发板的QT测试(zmj)2022-09-06 0
-
【飞凌RZ/G2L开发板试用体验】SSH登录核心参数测试,PWM驱动编码器电机2022-10-11 0
-
【米尔瑞萨RZ/G2L开发板-试用体验】米尔瑞萨RZ/G2L开发板使用SSH登录2023-06-11 0
-
【米尔瑞萨RZ/G2L开发板-试用体验】认识一下米尔瑞萨RZ/G2L开发板的核心板2023-07-29 0
全部0条评论

快来发表一下你的评论吧 !
