

基于自动驾驶汽车记录的3D激光扫描的SLAM闭环问题讨论
描述
简介
我们在之前的博客中讨论了一些激光回环检测的方法,但是基本都是围绕着点云特征去做的,并未涉足过深度学习的相关方法,之前作者在查找《经典文献阅读之—BoW3D》资料时看到了一个比较感兴趣的工作《OverlapNet: Loop Closing for LiDAR-based SLAM》,同时这个文章还拥有对应的开源源码Github,非常适合复现以及学习。
工作重心
同时定位和映射(SLAM)是大多数自主系统所需的基本能力。在本文中,我们讨论了基于自动驾驶汽车记录的3D激光扫描的SLAM闭环问题。
我们的方法利用深度神经网络,利用从激光雷达数据生成的不同线索来寻找环路闭合。
它估计广义到距离图像的图像重叠,并提供扫描对之间的相对偏航角估计。
基于这些预测,我们处理环路闭合检测,并将我们的方法集成到现有的SLAM系统中,以改善其映射结果。
简单来说,作者通过深度学习完成点云转换为影像,然后做回环检测, 输出Overlap和yaw的操作步骤,文中指出,本文的主要创新点有:
能够利用多个线索,不需提前知道两个雷达扫描的相对位姿,只利用范围、法向量、强度和语义等线索,使用深度神经网络直接估计两个激光雷达扫描的重叠率,以及相对偏航角。
结合里程计信息和重叠率预测实现闭环的检测、修正,可以检测到的闭环整合到现有SLAM系统中,可以提高整体位姿估计的结果,产生全局一致的地图。
无需先验位姿信息,解决在自动驾驶中3D LiDAR SLAM 的闭环检测问题,使用产生正确扫描匹配结果的OverlapNet网络预测初始化ICP
详细算法
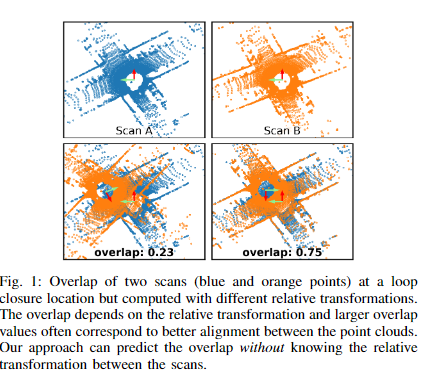
2.1 Overlap的概念
作者认为直接对比两个点云之间的距离不够精确,因为会受漂移的影响。
因此提出用重叠率来代替距离检测回环。具体思路是由影像的overlap中来,要成功匹配两个图像并计算它们的相对姿态,图像必须重叠。
这可以通过将重叠百分比定义为第一图像中的像素的百分比来量化,该像素可以在没有遮挡的情况下成功地投影回第二图像中。
请注意,该度量不是对称的:如果图像对存在较大的尺度差异。
例如,一幅图像显示一堵墙,另一幅显示该墙周围的许多建筑物,则第一到第二幅图像的重叠百分比可能较大,而第二到第一幅图像的交叠百分比较低。
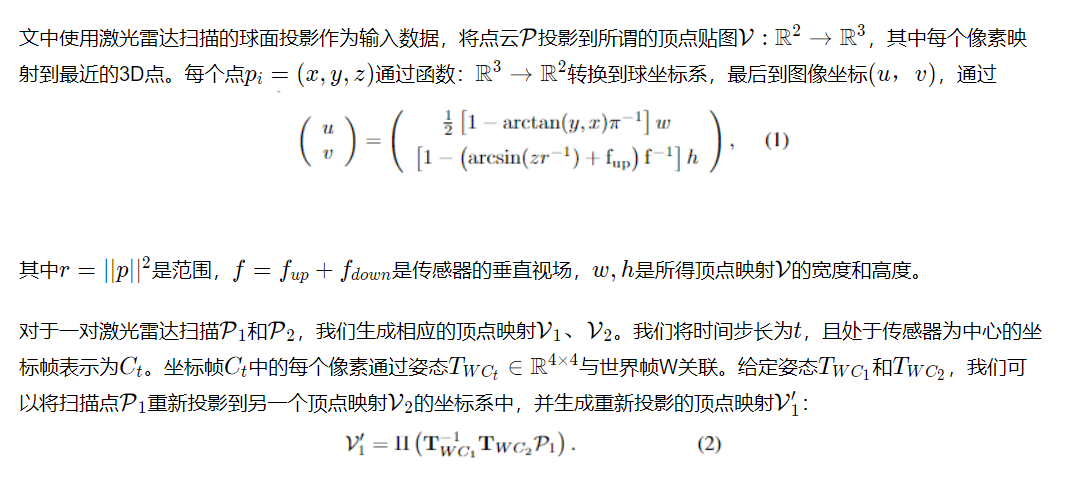
在本文中,我们使用了距离图像重叠的思想,明确地利用了距离信息
对于环路闭合,重叠百分比的阈值可用于决定两个激光雷达扫描是否在同一位置和/或环路闭合。
对于环路闭合,这种测量可能比一对扫描记录位置之间的常用距离更好,因为位置可能会受到漂移的影响,因此不可靠。
重叠预测与相对姿势无关,因此可用于查找环路闭合,而无需知道扫描之间的正确相对姿势。
2.2 激光雷达扫描对之间重叠的定义
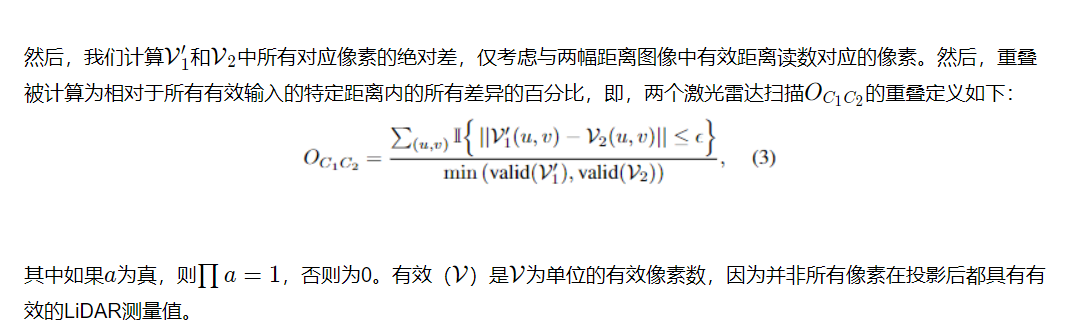
简单来说就是将两个点云转化为二维图并且坐标系对齐,如果两个坐标差小于阈值记为1,否则为零,求和再除以两个图中像素较小的那个,作者想用这个等式建立训练集。
对于旋转,作者选择旋转多个角度,用最大重叠值代表最终重叠值。
2.3 网络结构
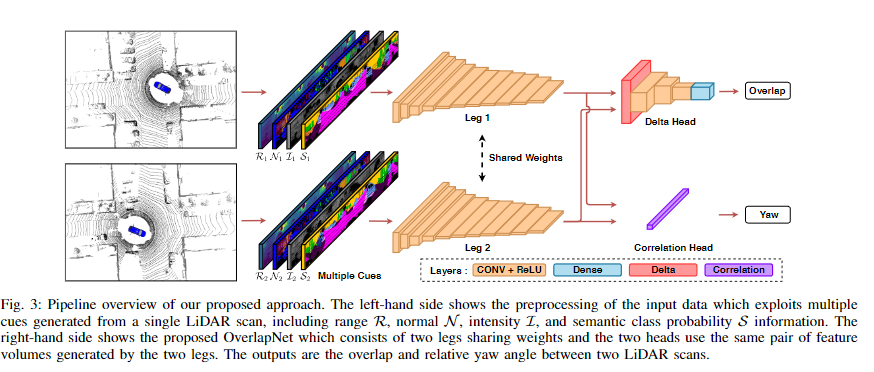
下图描述了所提出的重叠网络的概述。我们利用了多个线索,这些线索可以从单个激光雷达扫描中生成,包括深度、法线、强度和语义类概率信息。
深度信息存储在由一个通道组成的范围图R中。我们使用顶点映射的邻域信息来生成法线映射N,它有三个通道编码法线坐标。
我们直接从传感器获得强度信息,也称为缓解,并使用强度信息为单通道强度图I。使用RangeNet++计算逐点语义类概率,我们将其表示为语义图S。
RangeNet++提供20个不同类的概率。为了提高效率,我们使用主成分分析将20维RangeNet++输出缩减为压缩的三维向量。
信息被组合成一个大小为64×900×D64×900×D的输入张量,其中64900是输入的高度和宽度,$D$取决于使用的数据类型.
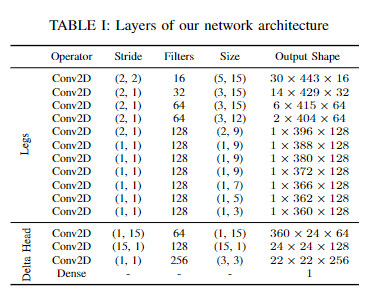
这里没有特别仔细去研究,具体就是由两个共享权重的Legs和由Legs生成的相同特征体积对的Head组成。
进一步说这个模型的作用就是将深度图,向量图,强度图,还用RangeNet++做了个语义图一起作为输入。
一个输出是角度特征向量,一个输出是两次扫描之间的重叠率。
同时使用基于surfel的映射系统SuMa作为的SLAM的 pipeline,并将OverlapNet集成到SuMa中,以取代其原始的启发式环路闭合检测方法。
所以说最后就是SuMa+OverlapNet的集合完成的。
审核编辑:刘清
-
谷歌的自动驾驶汽车是酱紫实现的吗?2011-06-14 0
-
汽车自动驾驶技术2016-04-14 0
-
自动驾驶真的会来吗?2016-07-21 0
-
[科普] 谷歌自动驾驶汽车发展简史,都来了解下吧!2016-10-25 0
-
浅析自动驾驶发展趋势,激光雷达是未来?2017-09-06 0
-
无人驾驶与自动驾驶的差别性2017-09-28 0
-
5 款激光雷达:iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-1282018-07-26 0
-
自动驾驶汽车的定位技术2019-05-09 0
-
如何让自动驾驶更加安全?2019-05-13 0
-
自动驾驶汽车的处理能力怎么样?2019-08-07 0
-
3D传感器如何为车内安全保驾护航?2020-07-29 0
-
自动驾驶这些年经历了什么?2020-08-04 0
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 0
-
谈一谈自动驾驶的激光雷达2021-06-17 0
-
基于视觉的slam自动驾驶2021-08-09 0
全部0条评论

快来发表一下你的评论吧 !
