

简化GNSS接收机设计
描述
介绍
全球导航卫星系统 (GNSS) 接收器处理卫星信号以计算位置、速度和时间。这些接收器提供广泛的导航解决方案,从船舶和航空电子设备到车载和静态摄像头系统(图 1)。
尽管许多应用都可以使用通用GNSS接收机信息,但这些系统都依赖于接收机前端解决方案的功能。接收器的前端必须接收卫星的微弱模拟信号,并将其适当地调理为有用的数字输出。
本文讨论了典型接收器前端的要求和挑战,并提出了一种集成解决方案,该解决方案接收来自多个卫星导航系统的信号,从而将设计从多个接收器设备简化为一个。
全球导航卫星系统 – 全球导航卫星系统
存在几个轨道卫星星座,以提供自主的地理空间定位。GNSS接收器提供的任何导航解决方案都基于其与四颗或更多卫星的距离的计算以及对传入信号的解码。GNSS 接收器提取单个卫星信号,并使用它们来计算接收器位置的位置、速度和时间。
前端注意事项
RF 前端 IC 的主要功能是对 GNSS 信号进行放大、下变频、滤波和采样,同时尽可能减少噪声(图 2)。
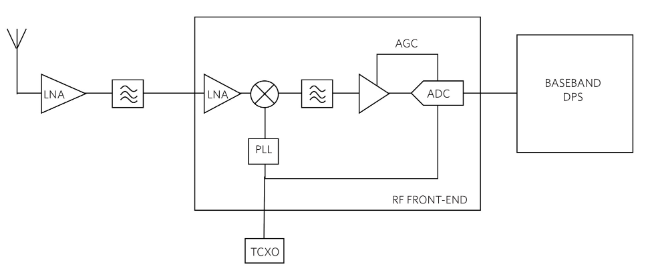
图2.典型的全球导航卫星系统接收系统
GNSS 接收器前端电路关注的关键领域包括低噪声/高增益/IF(中频)调制、滤波和模数转换。
在GNSS接收器的前端有一个有源或无源天线,用于捕获并可能放大非常微弱的卫星信号。还可以使用SAW滤波器来减少干扰信号。RF前端IC信号处理的第一阶段是通过低噪声放大器(LNA)进行低噪声放大。
低噪声:低GNSS信号强度需要高度灵敏的LNA级。在此阶段,低噪声系数(NF)是提供GNSS信号高灵敏度的最重要规格。
高增益:天线上接收到的GNSS信号通常约为-130dBm。在准备模数转换时,信号的总放大需要约为115dB。在该系统中,增益通过LNA、IF滤波器和可编程增益放大器(PGA)提供。PGA的增益可通过自动增益控制(AGC)环路进行控制,该环路可在ADC输入端保持最佳信号电平。
中频:前端接收器必须下变频至中频10MHz或直流。混频器级完成这种下变频,并产生同相(I)和正交(Q)信号分量。
滤波:混频级后滤波的主要目的是在主放大级之前降低噪声带宽并衰减干扰信号。
GNSS 接收器系统周围可能存在干扰信号。这些干扰源可能是无意的,例如GSM-1800蜂窝无线信号,也可能是敌对干扰信号。恶意干扰信号通常称为干扰器。一种常见的干扰抑制技术是使用SAW滤波器。虽然,如果干扰器就在 GNSS 信号的顶部,这将无济于事。
ADC:通常,前端使用1位、2位或3位ADC来产生数字I和Q输出信号。如果ADC位数增加到3位以上,则信噪比(SNR)的回报递减。但是,有时使用更高分辨率的ADC来提供抗干扰能力。
朝着简单解决方案前进
集成的前端接收器解决方案必须具有关键操作和规格,同时能够接收来自主要GNSS星座的信号。MAX2769C将必要的RF前端功能集成到一个芯片中,显著缩短了GNSS接收机的开发时间。
有两个 LNA。一个LNA具有0.9dB噪声系数和19dB增益,适用于无源天线。另一个LNA的噪声系数为1.5dB,增益略低。第二个LNA适用于有源天线使用(图3)。使用高增益LNA时,整个接收器的级联噪声系数通常为1.4dB。
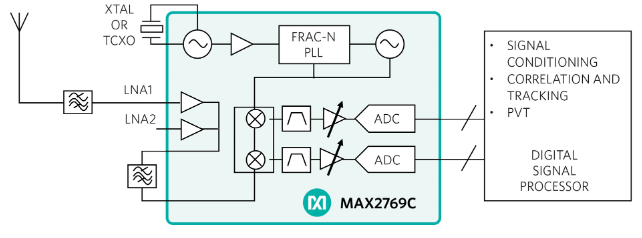
图3.MAX2769C 全球导航卫星系统接收器
MAX2769C可以检测有源天线的存在,并自动选择增益较低的LNA。
小数 N 分频 PLL 在 XTAL 频率和中频方面提供了灵活性。IF滤波器可配置为用于非零IF的复数多相滤波器或用于零IF的低通滤波器。可以为要接收的信号的带宽选择滤波器带宽。
如果首选使用外部更高分辨率ADC,则可以绕过片内ADC。
MAX2769C可以接收来自GPS、GLONASS、伽利略和北斗卫星系统的L1频段信号。
结论
MAX2769C的IF滤波器可调频率允许设计人员访问天空中不仅一个星座,而且访问所有四个星座。MAX2769C GNSS接收器具有接收来自GPS、GLONASS、伽利略和北斗卫星系统的信号的灵活性,同时提供高水平的集成性能。该器件用简单紧凑的解决方案取代了PCB上的多个独立接收器。
审核编辑:郭婷
-
差分跳频信号最佳接收机设计2009-03-01 882
-
MAX2769B下一代GNSS接收机2011-09-05 2219
-
基于SoC的星载微型GNSS接收机设计2016-01-04 661
-
扩频接收机设计实例2016-06-07 542
-
基于CBOC信号的导航接收机设计与实现2017-01-14 586
-
采用SOC的星载微型GNSS接收机设计方案2018-02-10 1852
-
如何简化GNSS接收机设计2022-06-24 1508
-
BD-GNSS-XK100GNSS接收机产品特性2023-02-28 455
-
BT-641G RTK GNSS接收机数据手册2023-04-25 205
-
简析GNSS接收机核心技术以及特点2022-11-30 1463
-
GNSS接收机维护保养方法2022-12-15 1171
-
GNSS接收机产品特性2023-02-22 614
-
地质灾害监测GNSS设备 GNSS接收机2023-03-14 1018
-
GNSS接收机是什么?怎么分类的?2023-10-30 1735
-
大坝安全监测GNSS接收机:保障水库安全2024-04-17 82
全部0条评论

快来发表一下你的评论吧 !
