

图达通的激光雷达产品工作原理及应用优势
描述
激光雷达是市面上争议很大的一个传感器,摆在最前面的一个争议就在使用它的必要性上。
坚定的激光雷达派,以Waymo为领头羊的L4路线目前遇到了很大的阻碍,从L2开始演进的特斯拉,虽然Autopilot进步不达预期,但是确实是铁杆的反激光雷达派。而用上激光雷达的量产车型,虽然有奥迪和奔驰,但是我们并没有看到整体的效果有太大的起色。
中国的新势力汽车在智能化的道路上一贯是走在了世界的前列。今年,蔚来汽车的ET7,小鹏G9和理想L9车上,分别用上了具有代表性三家激光雷达企业的产品:图达通(Innovusion)、速腾和禾赛,确实是值得我们观察的。
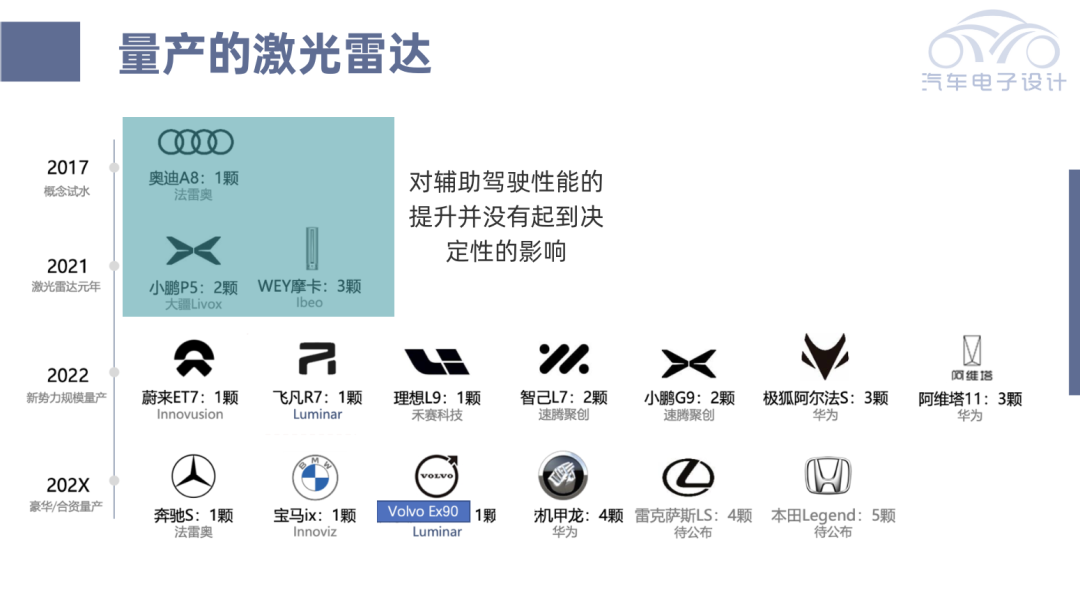
▲ 图1. 激光雷达市场一直存在使用的价值问题
从激光雷达的点云分割创造三维立体图像,分辨度精准度高;在读取物体信息(包括探测距离/角度分辨率等)方面优势突出,且无需依赖深度算法——这是目前所有除了特斯拉以外,所有面向开发L3以上的智能辅助驾驶都会采用的解决方案。

▲图2. 不同产品的特性比较
Part 1
图达通产品工作原理
图达通年度媒体沙龙刚结束,正好聊聊用在蔚来汽车上的这个量产产品。
激光雷达由四个基础组成部分:激光发射器、扫描器、接收器以及处理设备组成。
图达通在这里的解决方案是,分别采用了 1550nm 光纤激光器、转镜+振镜方案、APD 雪崩二极管以及 FPGA 处理器。转镜+振镜二维扫描方案,1550nm激光发射器的采用使其激光雷达能够以更大功率扫描更远的范围,可以实现最远500米的探测距离,10%反射率下250米的探测距离,最高分辨率0.06°*0.06°,水平视场角达到120°。
▲图3. 图达通产品的设计
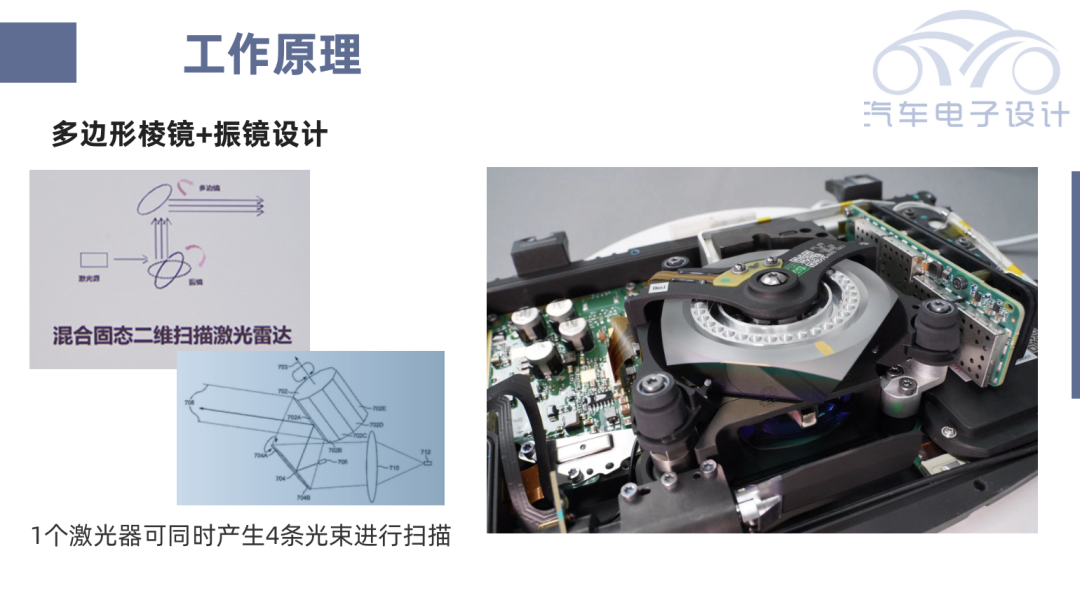
在这款产品中,转镜负责水平扫描,振镜负责垂直扫描。激光光束从光源射出后打在振镜上,反射到转镜之后到外界,再从被测物体处原路返回到接收光路中,并且被处理电路获取。如果把多个光源呈现略微不同的角度,同时向振镜发光,实现多线扫描。光纤是采用了一分四的方法,四路同时进行扫描。
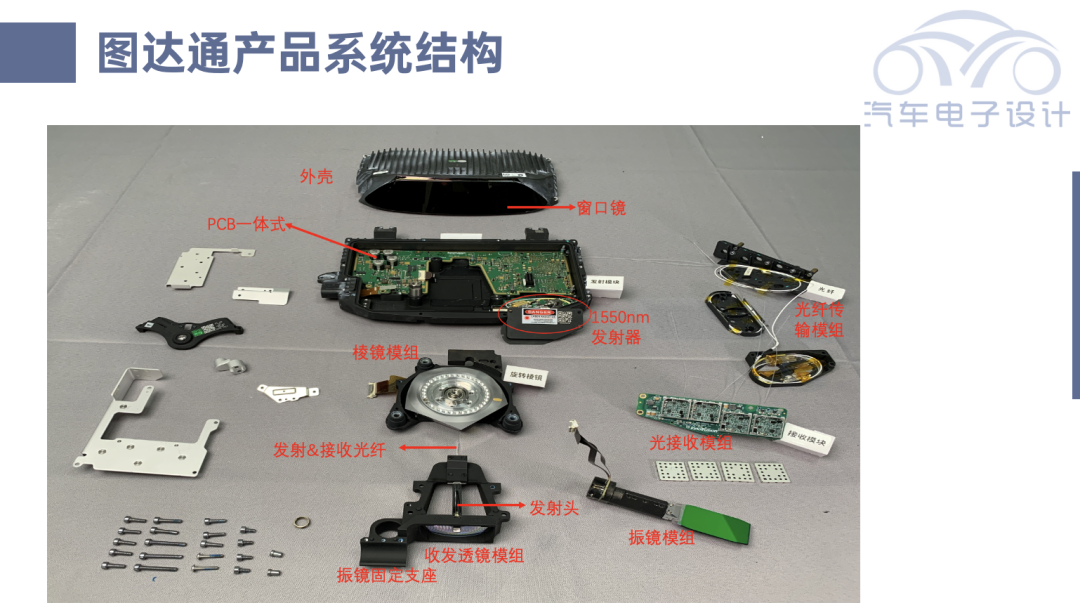
▲图4. 图达通激光雷达整体结构的分析
下图我们看到整个光纤发射器,通过一分四的模式(1根红色的发送,4根蓝色是接收)
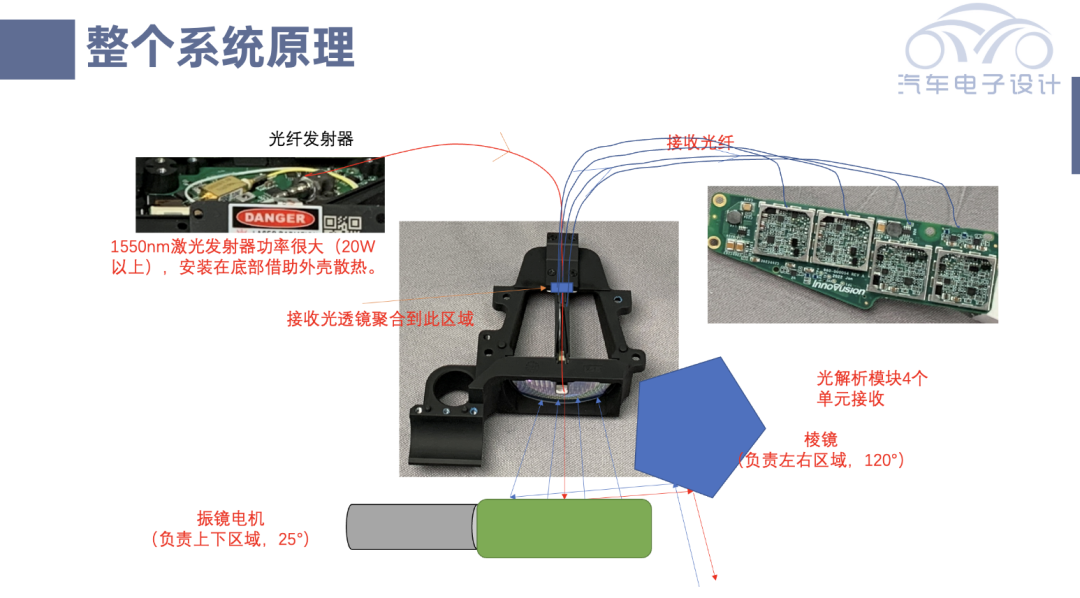
▲图5. 整个工作原理
1550 路线的激光器一般只需要一个光纤激光器 ,图达通 Talcon 采用 1分4 设计,1个激光器可同时产生4条光束进行扫描。光纤激光器内包括了泵浦光源和种子光源,由于1550nm激光发射器功率比较大,从位置来看,安装在底部借助铝合金外壳散热。

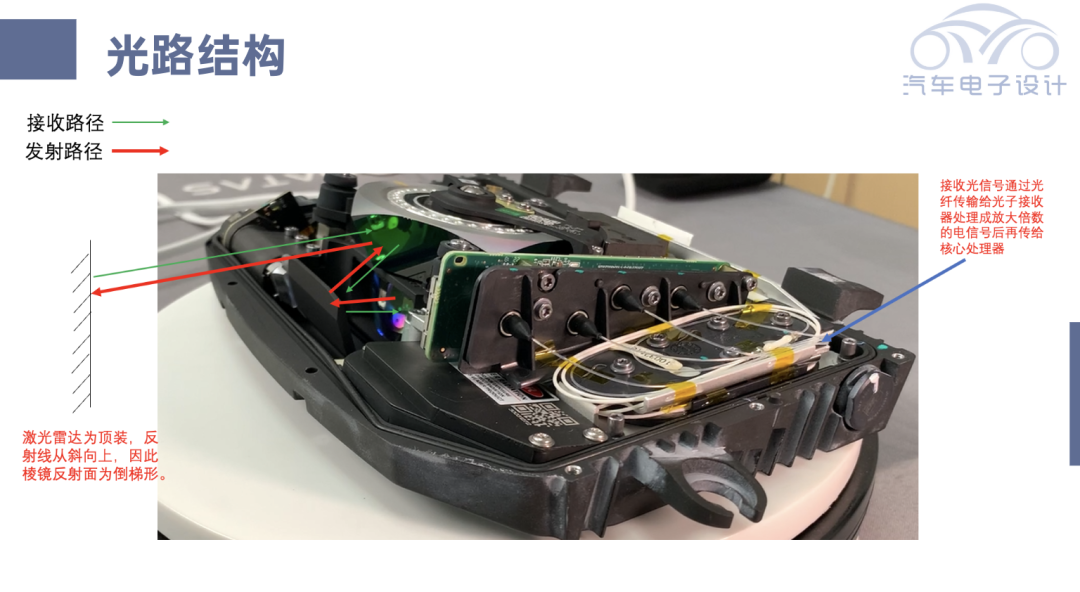
▲图6. 光路收发模块
激光雷达为顶装,反射线从斜向上,因此棱镜反射面为倒梯形,在这里4路返回的光纤接口对应4路APD(接收稳定、可靠性最好)进行处理,接收光信号通过光纤传输给光子接收器处理成放大倍数的电信号后再传给核心处理器。
▲图7. 整个模块的概览
从系统成本来看,光路结构、APD和光纤成本较高,整个电路部分的成本控制得比较好。

▲图8. 电路结构
Part 2
图达通的优势
从应用层面来看,我觉得围绕整个前方视野探测中,这款激光雷达属于预警和扫盲的作用。 100米处的抛洒物都对于人眼识别来说很有挑战,通过可探测到100米之外20*40cm大小的抛洒物且点云清晰(5-6个点),比如道路前方的20cm的轮胎,通过可行驶区域的点云输出来给自动驾驶域控制器进行预警。
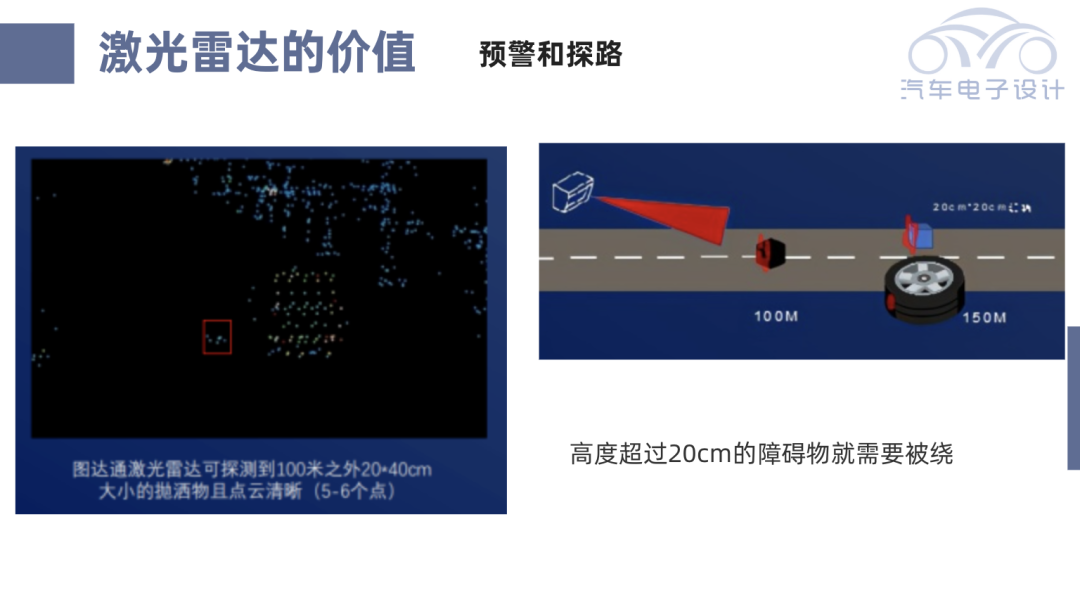
▲图9. 激光雷达的价值
图达通的激光雷达扫描采用二维扫描模式,中间高密度区域为ROI 区域,点云密度是非ROI 区域的6 倍左右。通过域控下发指令给LiDAR,ROI 区域可以在整个FOV 内实现实时动态调整,在大曲率转弯以及远距离小目标的检测跟踪等方面有重要意义。
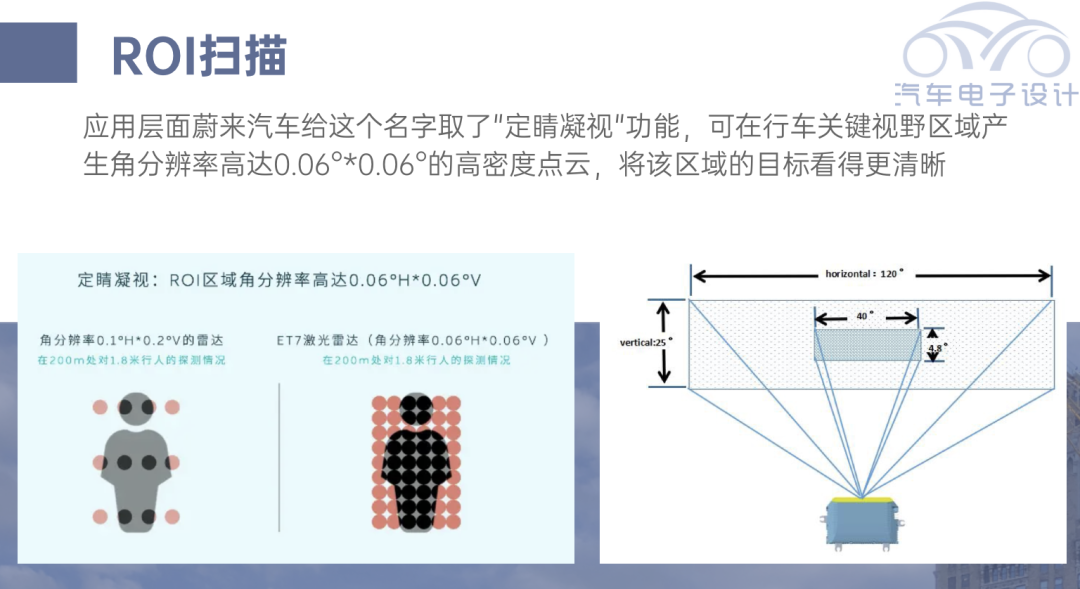
▲图10. 设计的目标和效果
小结:不管是1万块的激光雷达还是4000块的激光雷达,价格是不是值,在早期不那么重要,更多是一种技术探索。从长期角度来看,在激光雷达部署以后,自动辅助驾驶在感知、规划层面到底能做成啥样,值得我们持续观察。
审核编辑:郭婷
-
激光雷达分类以及应用2017-09-19 0
-
常见激光雷达种类2017-09-25 0
-
北醒固态设计激光雷达2018-01-25 0
-
北醒固态激光雷达2018-01-25 0
-
固态设计激光雷达2018-01-25 0
-
激光雷达的核心重要指标到底是什么?2018-02-07 0
-
机器人和激光雷达都不可或缺2019-02-15 0
-
毫米波雷达VS激光雷达VS超声波雷达2019-09-19 0
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 0
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 0
-
激光雷达产品选择指南2021-05-26 1425
-
激光雷达产业链梳理2022-08-28 6197
-
国外激光雷达产业链图谱2022-10-28 1641
-
速腾聚创发布超长距激光雷达产品M32024-01-10 441
-
激光雷达LIDAR基本工作原理2024-03-05 649
全部0条评论

快来发表一下你的评论吧 !
