

CKS32F4xx系列mcu的GPIO口配置方法
控制/MCU
描述
CKS32F4xx系列产品GPIO口配置
GPIO(General-purpose input/output)是通用输入输出端口的简称,CKS32F4xx系列产品通过GPIO引脚与外部设备连接起来,从而实现与外部通讯、控制以及数据采集的功能。最基本的输出功能是由CKS32F4xx系列产品控制引脚输出高、低电平,实现开关控制,如把GPIO引脚接入到LED灯,那就可以控制LED灯的亮灭,引脚接入到继电器或三极管,那就可以通过继电器或三极管控制外部大功率电路的通断。最基本的输入功能是检测外部输入电平,如把 GPIO引脚连接到按键,通过电平高低区分按键是否被按下。
GPIO硬件结构框图
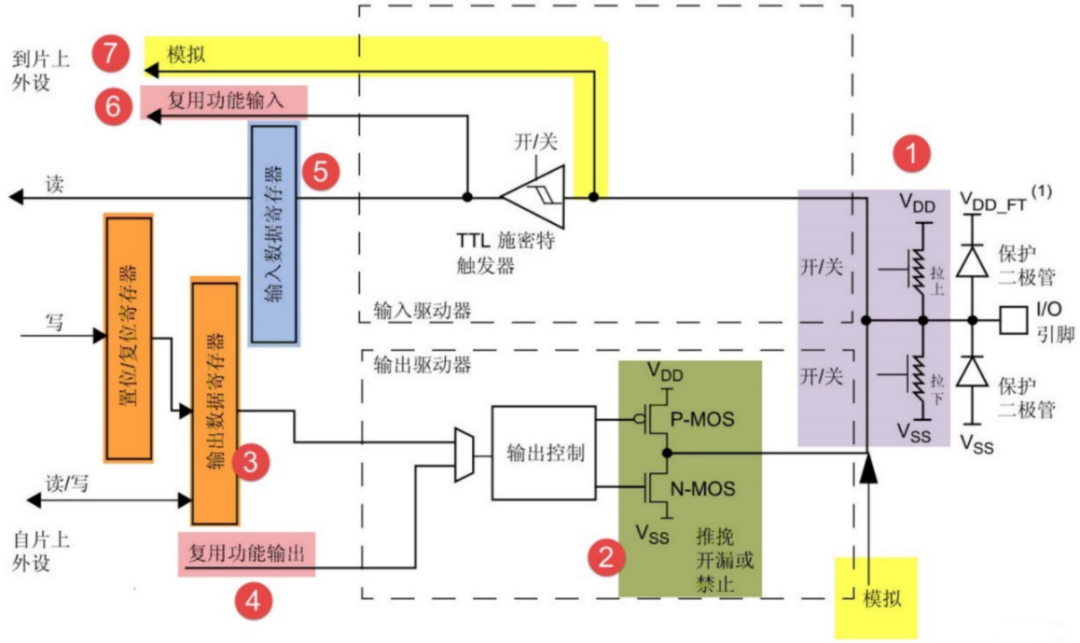
该图从最右端看起,最右端标注着“I/O”的就是代表CKS32F4xx系列产品引出的GPIO引脚,其余部件都位于芯片内部。引脚处的两个保护二级管可以防止引脚外部过高或过低的电压输入,当引脚电压高于VDD_FT时,上方的二极管导通,当引脚电压低于VSS时,下方的二极管导通,由此可以防止不正常电压引入芯片导致芯片的烧毁。这里要特别注意VDD_FT 代表IO口兼容3.3V和5V,如果没有标注“FT”,就代表着不兼容5V。在芯片数据手册的引脚定义中,会看到有“电平I/O”一列,有FT标注的即为支持5V,如下图所示:
标号1处是上拉、下拉电阻,从它的结构我们可以看出,通过上、下拉对应的开关配置,我们可以控制引脚默认状态下的电压,开启上拉的时候引脚电压为高电平,开启下拉的时候引脚电压为低电平。同时也可以设置“既不上拉也不下拉模式”,我们也把这种状态称为浮空模式。
标号2处是一个由P-MOS和N-MOS管组成的单元电路。这个结构使GPIO具有了“推挽输出”和“开漏输出”两种模式。上方的P-MOS管高电平导通,低电平关闭,下方的N-MOS低电平导通,高电平关闭。
标号3处是输出数据寄存器,它为标号2处的双MOS管结构电路提供输入控制信号,因此通过修改输出数据寄存器的值就可以修改GPIO引脚的输出电平。而图中“置位/复位寄存器 GPIOx_BSRR”可以通过修改输出数据寄存器的值从而影响电路的输出。
标号4处是复用功能输出,“复用”是指CKS32F4xx系列产品的其它片上外设可以对GPIO引脚进行控制,此时GPIO引脚用作该外设功能的一部分,算是第二用途。例如我们使用USART串口通讯时,需要用到某个GPIO引脚作为通讯发送引脚,这个时候就可以把该GPIO引脚配置成USART串口复用功能,由串口外设控制该引脚,发送数据。
标号5处是输入数据寄存器,它连接到图中的TTL施密特触发器,触发器的基本原理是当输入电压高于正向阈值电压时,输出为高;当输入电压低于负向阈值电压时,输出为低;IO口信号经过触发器后,模拟信号转化为0和1的数字信号,也就是高低电平,并且是TTL电平协议, 然后存储在“输入数据寄存器。因此,通过读取该寄存器就可以了解GPIO引脚的电平状态。
标号6处是复用功能输入,与“复用功能输出”模式类似,同样,如果我们使用USART串口通讯时,需要用到某个GPIO引脚作为通讯接收引脚,这个时候就可以把该GPIO引脚配置成USART串口复用功能,使USART可以通过该通讯引脚接收远端数据。
标号7处是模拟输入输出,当 GPIO引脚用于ADC采集电压的输入通道时,用作“模拟输入”功能,此时信号是不经过施密特触发器的,因为经过施密特触发器后信号只有0、1 两种状态,所以ADC外设要采集到原始的模拟信号,信号源输入必须在施密特触发器之前。同样的,当 GPIO引脚用于DAC作为模拟电压输出通道时,此时作为“模拟输出”功能,DAC 的模拟信号输出就不经过双MOS管结构了,在GPIO结构框图的右下角处,模拟信号直接输出到引脚。
GPIO的工作模式
- 4种输入模式 -
1.浮空输入
浮空输入状态下,IO的电平状态是不确定的,完全由外部输入决定。如果在该引脚悬空的情况下,读取该端口的电平是不确定的。
2.上拉输入
在该模式下,如果IO口外部没有信号输入或者引脚悬空,IO口默认为高电平。如果I/O口输入低电平,那么引脚就为低电平,MCU读取到的就是低电平。
3.下拉输入
在该模式下如果IO口外部没有信号输入或者引脚悬空,IO口默认为低电平,如果I/O口输入高电平,那么引脚就为高电平,MCU读取到的就是高电平。
4.模拟功能
当GPIO用于模拟功能时,引脚的上、下拉电阻是不起作用的,这个时候即使配置了上拉或下拉模式,也不会影响到模拟信号的输入输出。除了ADC和DAC要将IO配置为模拟功能模式之外,其他外设功能一律要配置为复用功能模式。
- 4种输出模式 -
1.开漏输出(带上拉或者下拉)
在该模式下,若MCU控制输出为高电平1时,输出指令是不会起到作用的。此时I/O端口的电平就不会由输出的高电平决定,而是由I/O端口外部的上拉或者下拉决定,如果没有上拉或者下拉,IO口就处于高阻态。虽然通过软件设置内部上拉,也可以输出高电平,但是CKS32F4xx系列产品内部上拉是"弱上拉",即通过此上拉输出的电流是很弱的,驱动能力很弱。但是在该模式下,当MCU控制输出为低电平0时,即使没有上拉或者下拉,I/O端口也会输出低电平。另一方面,在开漏模式下,施密特触发器是打开的,即输入可用,可以通过输入数据寄存器GPIOx_IDR读取I/O的实际状态。开漏输出主要有以下两点作用:
a. I/O端口设置成开漏输出模式时,可以用来连接不同电平的器件,用来匹配电平,因为开漏引脚不连接外部的上拉电阻时,只能输出低电平,如果需要同时具备输出高电平的功能,则需要接上拉电阻。因此我们通过改变上拉电源的电压,便可以改变传输电平。比如通过加上上拉电阻就可以提供TTL电平-CMOS电平的输出。
b.当多个设置为开漏输出的引脚连接到一条总线上时。通过外加一个上拉电阻,在不增加任何器件的情况下,这些引脚形成了“与逻辑”关系,即“线与”。如果有一个引脚输出为逻辑0,相当于接地,那么与之并联的回路“相当于被一根导线短路”,所以总线上的逻辑电平便为0。只有都为高电平时,总线上的电平才为1。在IIC通信中,引脚通常设置为开漏输出模式。
2.复用开漏输出(带上拉或者下拉)
此时GPIO复用为其他外设,输出数据寄存器GPIOx_ODR无效;即输出的高低电平来源于其它外设,除了输出信号的来源改变之外,其他的与开漏输出功能相同。 3.推挽输出(带上拉或者下拉)
在该模式下,如果我们控制输出为0,低电平,则I/O端口的电平就是低电平。若控制输出为1,高电平,则I/O端口的电平就是高电平。此时,外部上拉和下拉的作用是控制在没有输出IO口的默认电平。在该模式下,施密特触发器也是打开的,即输入可用,通过输入数据寄存器GPIOx_IDR可读取I/O的实际状态。
4.复用推挽输出(带上拉或者下拉)
此时GPIO复用为其他外设,输出数据寄存器GPIOx_ODR无效;即输出的高低电平来源于其它外设,除了输出信号的来源改变之外,其他的与推挽输出功能相同。
- 4种输出速度 -
1. 2MHZ(低速)
2. 25MHZ(中速)
3. 50MHZ(快速)
4. 100MHZ(高速)
GPIO的引脚速度又称输出驱动电路的响应速度,即一个驱动电路可以不失真地通过信号的最大频率。比如信号频率为10MHz,而我们把GPIO速度配置成了2MHz,则10MHz的方波很可能就变成了正弦波,发生了失真。芯片内部在I/O口的输出部分安排了多个响应速度不同的输出驱动电路,我们可以根据自己的需要选择合适的驱动电路,通过选择速度来选择不同的输出驱动模块,达到最佳的噪声控制和降低功耗的目的。因为GPIO口的速度配置越高,噪声越大,功耗也越大。比如在USART串口通信中,若最大波特率只需115.2k,那用2M的速度就够了,既省电,噪声也小;而在SPI接口中,若使用18M或9M的波特率,则需要选用50M的GPIO的引脚速度。 注意:CKS32F407用于配置PA13输出速度的GPIOA_OSPEEDR寄存器的端口 13配置位(GPIOA_OSPEEDR_OSPEEDR13[1:0])初始值为00,即PA13的I/O输出速度默认为低速。因此客户在实际使用CKS32F407时,要按照参考手册中的介绍来配置GPIOA_OSPEED寄存器中 OSPEEDR13[1:0]位,从而来选择PA13的I/O输出指定的速度。
GPIO的配置
接下来我们讲解如何利用CKS32F4xx系列固件库对GPIO口的工作模式进行配置。首先,固件库中定义了一个如下的结构体:
typedef struct
{
uint32_t GPIO_Pin;
GPIOMode_TypeDef GPIO_Mode;
GPIOSpeed_TypeDef GPIO_Speed;
GPIOOType_TypeDef GPIO_OType;
GPIOPuPd_TypeDef GPIO_PuPd;
}GPIO_InitTypeDef;
通过对该结构体成员中各个变量的初始化,就可以完成对2.2小节中所讲的GPIO口的工作模式配置。结构体中各个成员变量的介绍及初始化时可被赋的值如下:
1)GPIO_Pin:用来选择要控制的GPIO引脚,在标准库函数中可选择的值及其定义如下:
#define GPIO_Pin_0 ((uint16_t)0x0001) #define GPIO_Pin_1 ((uint16_t)0x0002) #define GPIO_Pin_2 ((uint16_t)0x0004) #define GPIO_Pin_3 ((uint16_t)0x0008) #define GPIO_Pin_4 ((uint16_t)0x0010) #define GPIO_Pin_5 ((uint16_t)0x0020) #define GPIO_Pin_6 ((uint16_t)0x0040) #define GPIO_Pin_7 ((uint16_t)0x0080) #define GPIO_Pin_8 ((uint16_t)0x0100) #define GPIO_Pin_9 ((uint16_t)0x0200) #define GPIO_Pin_10 ((uint16_t)0x0400) #define GPIO_Pin_11 ((uint16_t)0x0800) #define GPIO_Pin_12 ((uint16_t)0x1000) #define GPIO_Pin_13 ((uint16_t)0x2000) #define GPIO_Pin_14 ((uint16_t)0x4000) #define GPIO_Pin_15 ((uint16_t)0x8000) #define GPIO_Pin_All ((uint16_t)0xFFFF)
2) GPIO_Mode:用来设置已经选择的GPIO引脚的模式,在标准库函数中可选择的值及其定义如下:
typedef enum
{
GPIO_Mode_IN = 0x00, /*!设置为输入模式 */
GPIO_Mode_OUT = 0x01, /*!设置为输出模式*/
GPIO_Mode_AF = 0x02, /*!设置为复用模式 */
GPIO_Mode_AN = 0x03 /*!设置为模拟模式*/
}GPIOMode_TypeDef;
3) GPIO_Speed:用来设置已经选择的GPIO引脚的速度,在标准库函数中可选择的值及其定义如下:
#define GPIO_Speed_2MHz GPIO_Low_Speed #define GPIO_Speed_25MHz GPIO_Medium_Speed #define GPIO_Speed_50MHz GPIO_Fast_Speed #define GPIO_Speed_100MHz GPIO_High_Speed
4) GPIO_OType:用来设置已经选择的GPIO引脚的输出模式,只有输出模式才需要该配置,输入模式下不需要该配置。在标准库函数中可选择的值及其定义如下:
typedef enum
{
GPIO_OType_PP = 0x00, /*!设置为推挽输出模式 */
GPIO_OType_OD = 0x01 /*!设置为开漏输出模式 */
}GPIOOType_TypeDef;
5) GPIO_PuPd:用来设置已经选择的GPIO引脚的上下拉,在标准库函数中可选择的值及其定义如下:
typedef enum
{
GPIO_PuPd_NOPULL = 0x00, /*!设置为既不上拉也不下拉/浮空模式 */
GPIO_PuPd_UP = 0x01, /*!设置为上拉模式*/
GPIO_PuPd_DOWN = 0x02 /*!设置为下拉模式*/
}GPIOPuPd_TypeDef;
根据上面所讲解的配置方法,我们讲解标准库下的3个实际配置实例。
1) 作为普通的GPIO口输出,控制LED灯的亮灭,其GPIO口初始化函数如下:
void LED_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF,ENABLE);//使能GPIOF时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;//LED1对应的IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//速度100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOF, &GPIO_InitStructure);//初始化GPIO
}
2) 复用为CAN外设的输出。
void CAN1_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能PORTA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11| GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA11,PA12
GPIO_PinAFConfig(GPIOA,GPIO_PinSource11,GPIO_AF_CAN1); //GPIOA11复用为CAN1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource12,GPIO_AF_CAN1); //GPIOA12复用为CAN1
3) 当ADC采集的输入通道,作为普通模拟输入。
void ADC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能GPIOA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;//PA5 通道5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;//模拟输入
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;//不带上下拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化
}
编辑:黄飞
-
CKS32F4xx系列产品串口DMA传输2023-04-10 977
-
CKS32F4xx系列FSMC功能简介2024-04-14 808
-
MCU微课堂|CKS32F4xx系列产品时钟配置2022-12-12 790
-
CKS32F4xx系列RNG功能设置2023-09-08 542
-
CKS32F4xx系列DAC功能2023-11-06 800
-
CKS32F4xx系列ADC多通道DMA电压采集2023-11-06 1047
-
CKS32F4xx系列低功耗模式STANDBY模式2023-11-06 432
-
CKS32F4xx系列低功耗模式SLEEP模式2023-11-06 628
-
CKS32F4xx系列低功耗模式STOP模式2023-11-06 571
-
CKS32F4xx系列产品Timer的基本使用方法-定时器脉冲计数2023-11-09 979
-
CKS32F4xx系列产品Timer的基本使用方法-比较输出2023-11-09 785
-
CKS32F4xx系列产品Timer的基本使用方法-定时操作2023-11-09 556
-
MCU微课堂 | CKS32F4xx系列产品SPI通信2023-10-24 634
-
MCU微课堂 | CKS32F4xx系列产品GPIO口配置2023-10-24 716
-
基于CKS32F4xx系列的MCU互补PWM方案2023-12-02 553
全部0条评论

快来发表一下你的评论吧 !
