

 其域创新手持激光雷达/手持SLAM其域灵光Lixel重建深圳规划馆
其域创新手持激光雷达/手持SLAM其域灵光Lixel重建深圳规划馆
今日头条
描述
深圳市当代艺术与城市规划馆位于深圳市福田区,总建筑面积约8.8万平方米,是一栋集艺术收藏与展示、信息查询和宣传、接待观光等为一体的综合性文化场馆,是深圳的地标性建筑。
进入场馆大厅,观众们都会被一个不规则金属球体装置所吸引。
这个名为“云”的雕塑建筑,造型来自于一颗火星卫星的逆向自转形态,高25米,分为上下三层,包含空间倾斜面、扭曲面、旋转曲面和大悬挑结构,主楼和外表皮钢结构既相互独立又相互联系,空间关系十分复杂。
场馆方面委托深圳市武测空间信息有限公司对“云”雕塑进行表面积计算,为雕塑保护管理提供新的思路方法和技术,助力艺术品研究、保护与合理开发工作。
-处理过程 -
其域创新合作伙伴深圳市武测空间信息有限公司接到需求后,结合测区实际情况,选用手持SLAM设备灵光LixelL1进行数据采集,并在此基础上进行测量与建模。
项目采集耗时2小时,内业建模8小时。
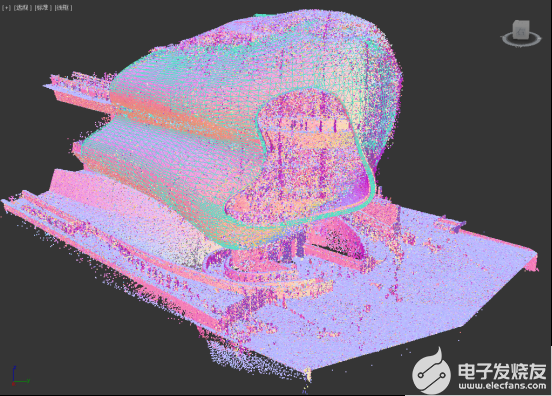
1)激光点云预处理。激光点云数据导入软件进行点云数据的切割、转换等细部处理。转换后的数据进行模型校正。
2)处理设计模型文件。提取与建模相关的部分,并依据激光点云数据对导入的设计模型进行复核并优化调整。
3)激光点云捕捉关键点。选取可能的建筑物角点,创建与激光点云对象形状一致的几何体。
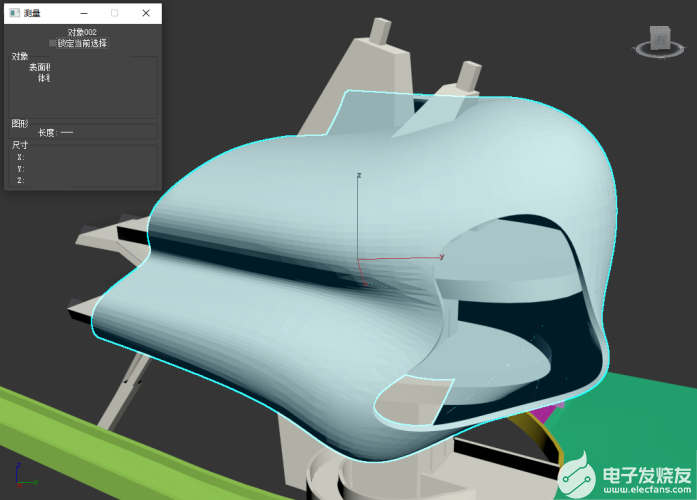
4)基于激光点云的逆向建模。通过激光点云切片进行立体模型绘制,并进行金属体表面积统计,将模型导出为模型成果。
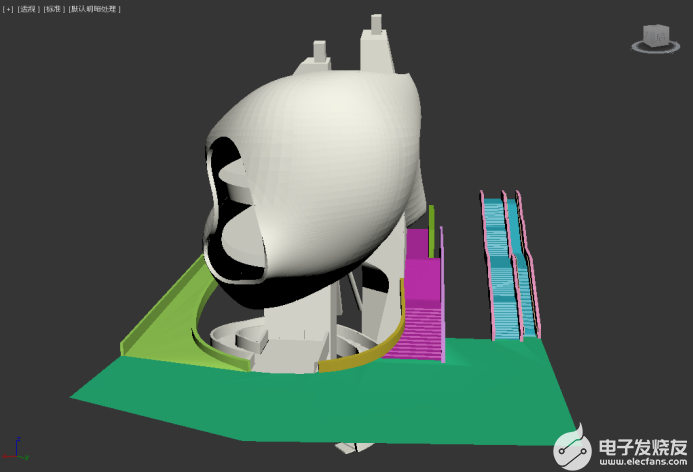
▲建模成果
-客户评价 -
武测空间表示,手持SLAM设备灵光Lixel L1方便携带操作,深度集成手持激光雷达、可见光相机、高精度惯导、高性能计算机与运动相机等模块,具有穿透性高、精度高、效率高的特点,可以有效应对测绘对象结构复杂、体积庞大的难题。
手持SLAM设备灵光Lixel L1一键操作自动作业,扫描过程实时解算,设备直出模型即刻可用。同时,结合其域创新的自主三维重建算法和后处理软件,可以计算位姿并生成厘米级精度模型,极大提升了项目内外业的执行效率。
武测空间认为,手持SLAM设备灵光LixelL1为艺术装置、雕塑、建筑等对象类型的测绘保护工作,提供了新思路、技术和设备。
*手持SLAM、移动激光扫描系统主要由激光扫描仪、惯性导航系统及相机组成,用于测量点的三维坐标和激光反射强度,相机用于测量点的三维坐标和颜色信息。根据移动激光扫描系统和数码相机采集的数据可以得到点云数据,包括三维坐标、激光反射强度、颜色信息。
Simultaneous Localization And Mapping,简称SLAM,通过对各种传感器数据进行采集和计算,生成对其自身位置姿态的定位和场景地图信息的系统。目前SLAM主要的两种形式是:基于激光雷达的SLAM(激光SLAM)和基于视觉的SLAM(Visual SLAM或VSLAM)。
手持激光雷达、手持SLAM设备的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到周围障碍物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离,脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体图像。激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了自身的定位。激光雷达距离测量比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易。同时,点云信息本身包含直接的几何关系,使测量和计算变得直观简单。
审核编辑 黄昊宇
-
激光雷达面临的机遇与挑战2017-09-26 0
-
激光雷达究竟为什么这么牛,这么贵2017-10-16 0
-
成熟的无人驾驶方案离不开激光雷达2017-10-23 0
-
消费级激光雷达的起航2017-12-07 0
-
5 款激光雷达:iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-1282018-07-26 0
-
AGV激光雷达SLAM定位导航技术2018-11-09 0
-
除了机器人行业,激光雷达还能应用于哪些领域?2018-12-10 0
-
当“思岚”激光雷达邂逅盲人拐杖2021-11-12 0
-
其域创新手持激光雷达/手持SLAM如何助力城市更新?2023-01-04 821
-
其域创新手持激光雷达/手持SLAM三维重建设备亮相深圳2022-12-29 934
-
一款优秀的手持SLAM/手持激光雷达设备应该是什么样的?2022-12-29 1605
-
其域创新手持激光雷达手持SLAM灵光Lixel,为地下停车场进行三维建模2023-01-05 1721
-
灵光Lixel L1助力高效堆体测量 |手持激光雷达手持SLAM2023-03-15 1054
-
无人机禁飞区如何进行三维重建 |手持激光雷达手持SLAM2023-04-10 1179
-
中国最大测绘地信展会,其域创新重新定义手持激光雷达、手持SLAM设备2023-04-27 1068
全部0条评论

快来发表一下你的评论吧 !
