

ARM通用寄存器及状态寄存器详解
描述
笔者来聊聊ARM通用寄存器以及状态寄存器的认识与理解。
ARM通用寄存器
对于处理器来说,寄存器可以作为暂存器,存储临时结果,也可以作为输入数据,方便运算,也可以作为一种索引,去访问存储器,其作用各种各样。
CortexM3/M4
CortexM3/M4是比较常用的ARM架构,很多厂商都采用了这样的架构,比如ST公司的stm32,广受大家欢迎,还有NXP的MK60芯片,一直在飞思卡尔比赛中很受欢迎,还有国产兆易创新的GD32,亚特力的AT32,国民技术的N32系列。
其在嵌入式领域非常受欢迎,相对方便上手,功能齐全,满足一般的对MCU的需求。
其寄存器模型如下: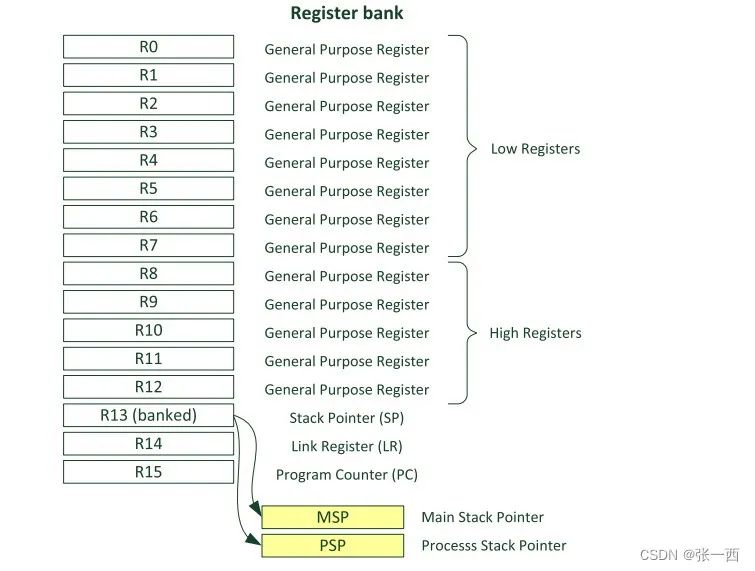
通用目的寄存器R0-R7
,低组寄存器,32bit,16位thumb以及32位的thumb-2指令均可以访问
可以看到R0、R1、R2三个作为参数传递进入。
后面R0作为结果传出进行比较。
传入参数是数组,为什么不直接传地址(LDR),而是通过DCD指令来传递呢?
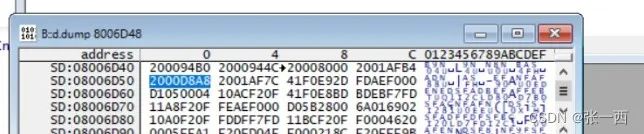
这是因为LDR取地址的范围有限,LDR Rn,#立即数地址,该地址只是是小范围(4KB?),所以可以看到DCD的地址就在不远处(6A92 - 6D48相差不远),而存储器的地址则在2000000范围,与其地址相差较大,从图二来看 DCD后的地址,其实是通过DCD的地址先寻址,寻址后再作为地址,继续寻址。
R0-R3一般作为参数传递,如果参数再多,则通过压栈的方式传递
R0、R1还会作为返回值进行传递,如果是32位则是R0,64位则会用R0-R1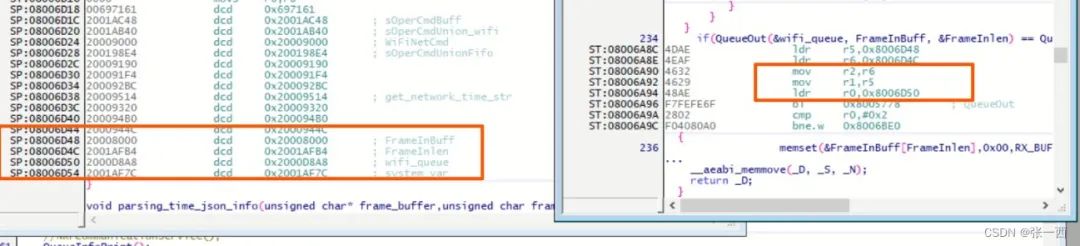
通用目的寄存器R8-R12
,高组寄存器,32bit,较少的16位thumb指令可以访问,一般是 thumb-2指令访问。
R11一般用作FP指针,保存栈帧(在加上编译选项时 ,见上篇文章,下文SP、LR同理ARM开发中几个常见的寄存器详解。
栈指针R13(SP) 指示当前栈所指位置。
链接寄存器R14(LR) 保存程序返回地址。
程序计数器R15(PC)
程序运行的当前位置。
下图一PC作为基址地址,然后去访问存储器,0x4079a1c+480 =0x4079c04
下图二直接将0x4079c04 作为地址给r0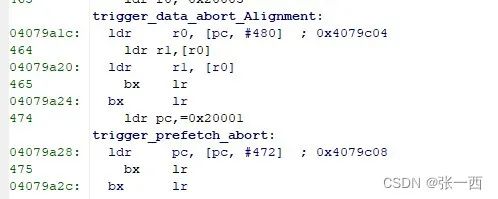
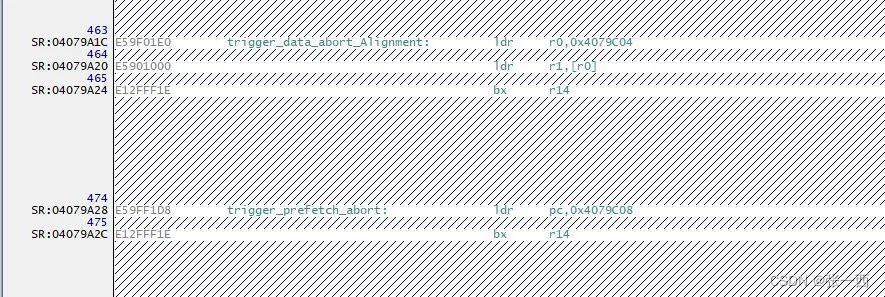
指令对齐半字或者字地址,最低位为0
特殊跳转指令,需要将PC 最低位表示Thumb状态,否则会触发异常。
PC有时候会作为基址寄存器,然后加地址偏移去访问数据
CortexR5
Cortex R系列继承了ARM7架构下的系统模型,有多组工作模式,每个模式都有自己的地址空间(堆栈地址SP)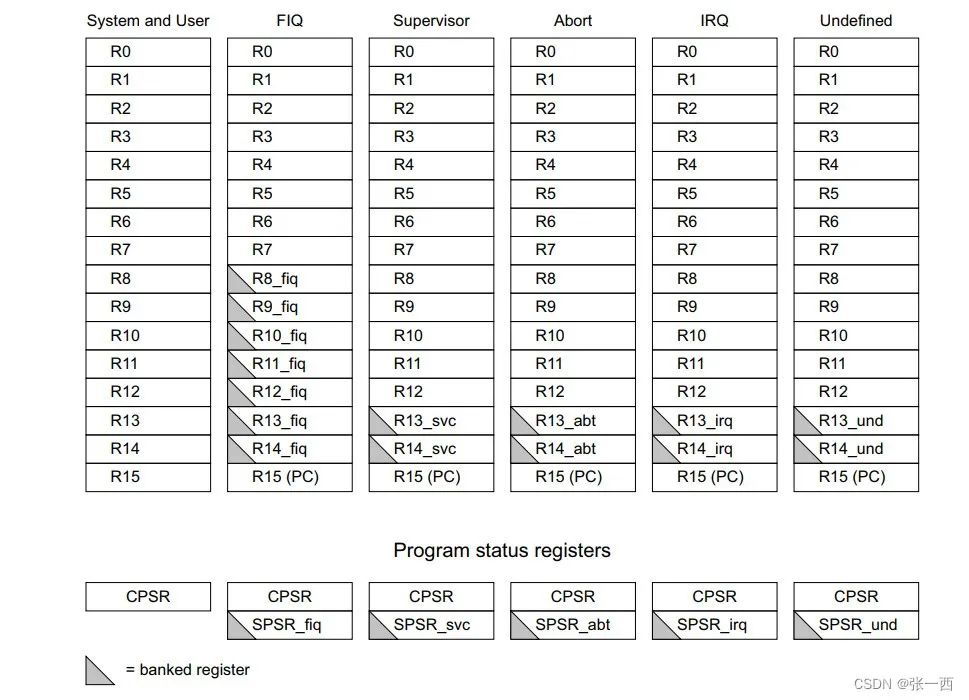
CortexR5 属于ARMv7指令集。
与CortexM3/4一致,其R0-R7 以及R8-R12的作用
user模式和sys模式共用一套寄存器,即共享
user/sys、FIQ、SVC、ABT、IRQ以及UND模式 下,LR、SP、SPSR均是独立,切换CPSR 模式之后,SP、LR及SPSR自动切换成相应模式下的寄存器值
FIQ 之所以被称之快速中断,是因为有独立的R8-R12寄存器,不需要压栈 ,直接使用,
SPSR是保存上一个模式的CPSR。
ARMv7的一般AR系列的寄存器模型和上述的基本相同,有一些新的扩展,
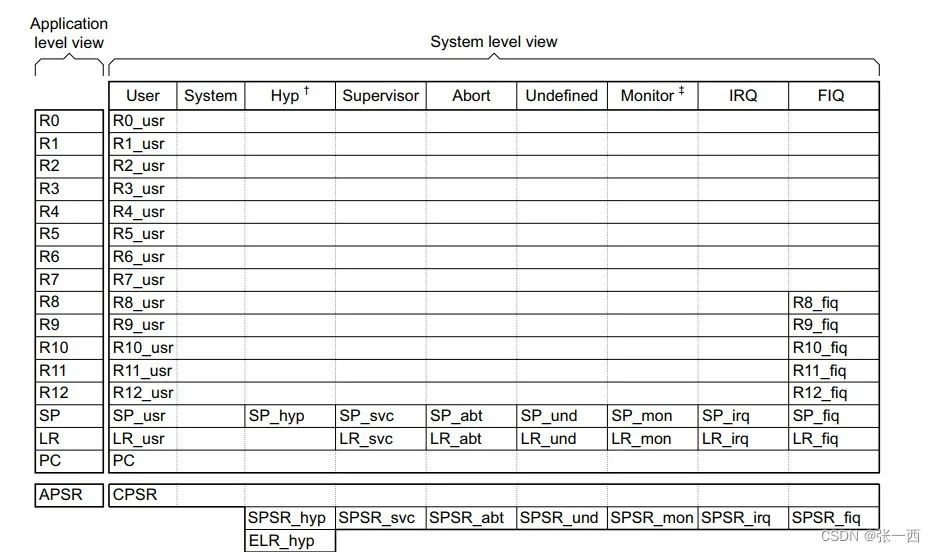
增加了Hyp模式以及Mon模式,分别用于虚拟扩展以及安全扩展,
Hyp模式下的LR为ELR,记录异常时的返回地址,其他均一致。
CortexA53
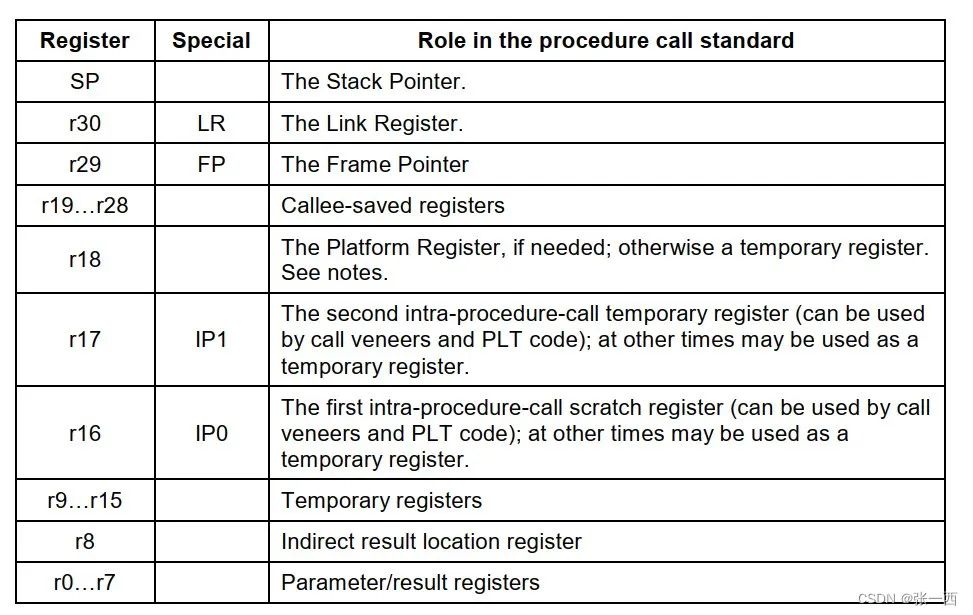
r0-r7 用来做参数传递或者发返回结果。
r8 间接的结果位置寄存器
r9-r15 暂存器 保存临时结果
r16-r17 动态链接(系统并不是所有地址都可以跳转)(链接器内部插入代码)所需要的寄存器
r18 the Platform ABI专用的寄存器 来保存内部程序状态(为了平台通用性 避免使用)
r19-r28 被调用者保存的寄存器(相对来说还有调用者保存寄存器 在CortexM3/4就有很好体现)
r29 FP寄存器,需要加编译选项
r30 链接寄存器
SP 栈指针,
PC 程序寄存器,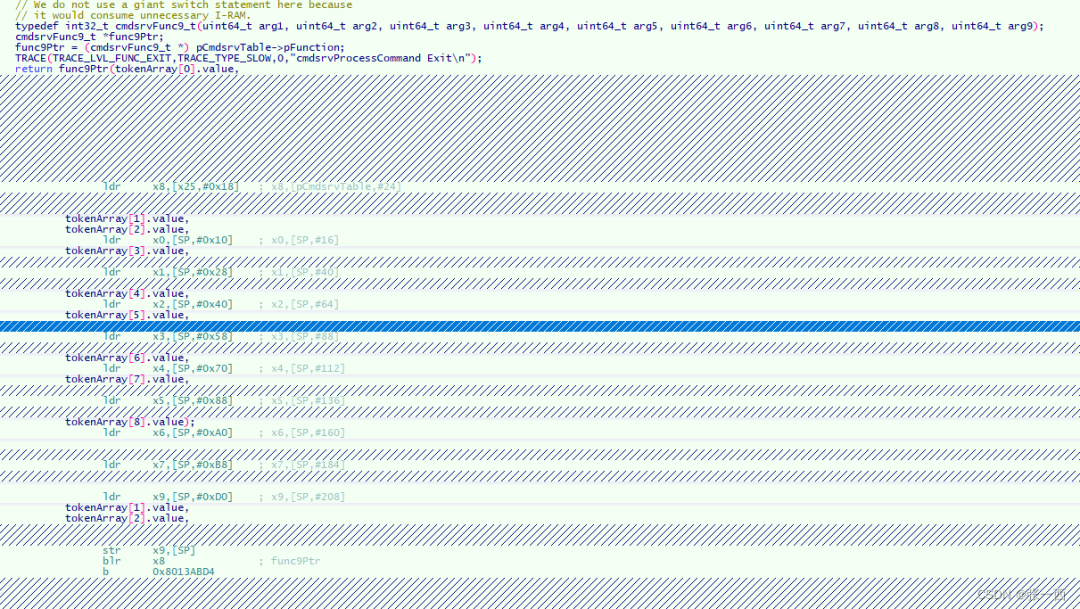 可以看到程序调用时,函数类型为9个参数,汇编代码x0-x7作为参数传递进去,最后一个参数,压栈进行传递,str x9,[SP] 。还用到了 blr 通过寄存器去进行链接跳转 最后通过b 跳转返回。
可以看到程序调用时,函数类型为9个参数,汇编代码x0-x7作为参数传递进去,最后一个参数,压栈进行传递,str x9,[SP] 。还用到了 blr 通过寄存器去进行链接跳转 最后通过b 跳转返回。
状态寄存器
寄存器通常是CPSR(Current Program state register),用来表示当前程序运行的状态、模式、运算结果状态、中断状态等。,比如下面这个CPSR寄存器模型。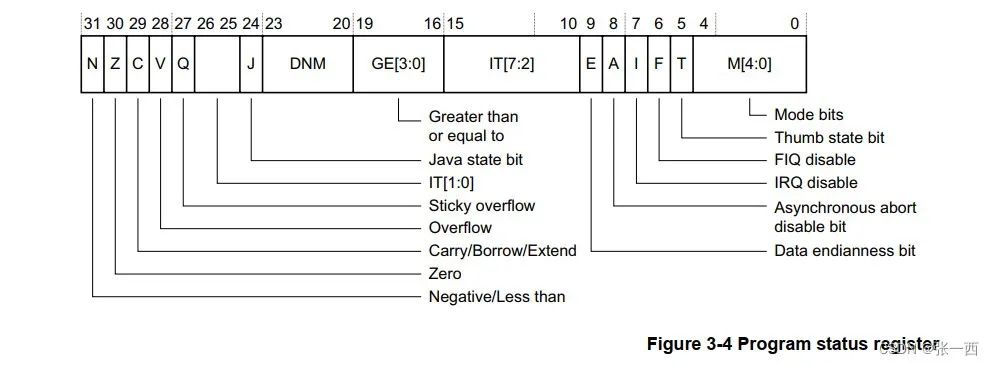
标志位域
说明解释:表示程序的运行结果的状态,可以用来跳转,例如:结果是否为0,结果是否有进位,结果是否溢出,结果是否为负数等等。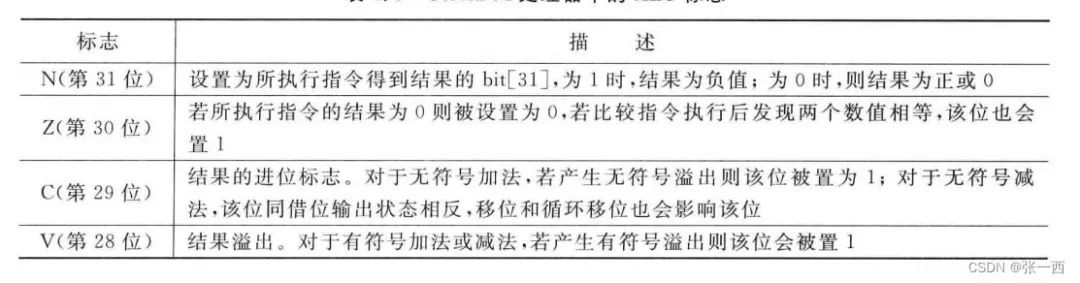
符号有NCVZ,分别是负数(Negative)、进位(Carry)、溢出(Overflow)、为0(Zero)标志。
衍生出许多跳转指令,近范围或者函数范围内跳转,比如以下这些指令
BEQ、BNE 通过判断Z==1,BEQ为相等则跳转,比如CMP X0,X1 BEQ
BCS、BCC通过判断C==1,BCS为大于等于则跳转,BCC为小于则跳转
BMI、MBL 通过判断N==1,BMI 为负数则跳转,BPL为整数则跳转
BVS、BVC 通过判断V==1,溢出则跳转,BVC为非溢出则跳转
BHI、BLS通过判断C == 1 and Z == 0 意思就是大于则跳转,
BGE、BLT 通过判断N == 1 and V == 1,或者 N == 0 and V == 0 有符号数大于等于
BGT、BLE 通过判断Z=0, N == 1 and V == 1 或者 Z=0 N == 0 and V == 0 有符号数大于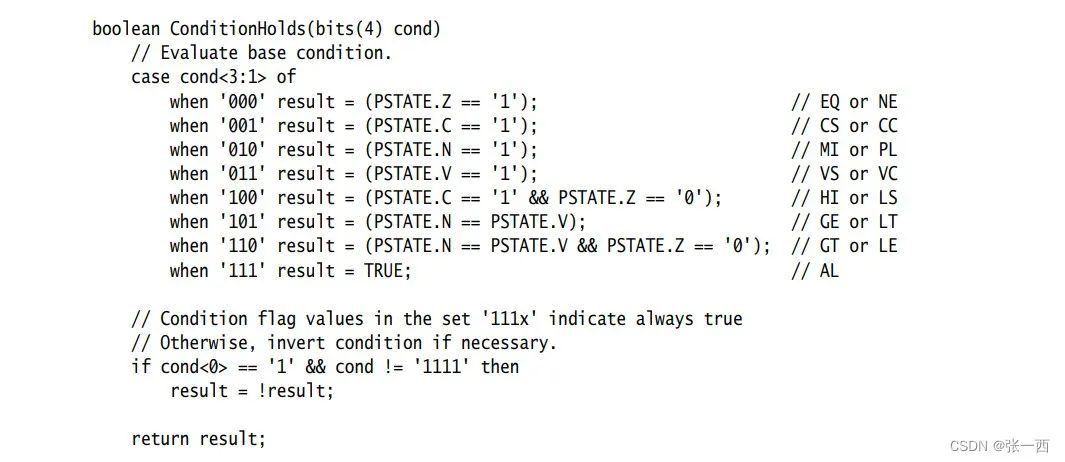
相关数字运算对标志位的影响。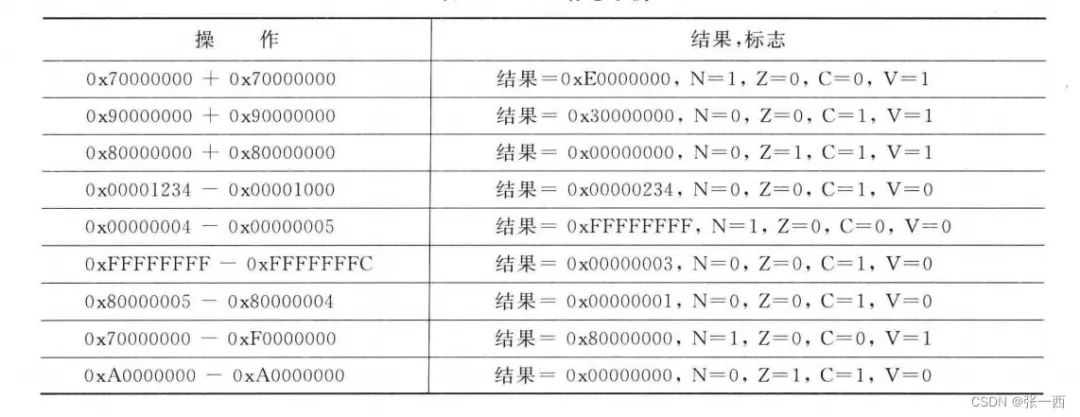
异常中断控制域
比如常见的DAIF 中断屏蔽位,分别为:
处理器状态debug中断 屏蔽位:查看点、断点以及系统单步运行
系统错误中断屏蔽位(通常是异步的错误)
普通中断屏蔽位
快速中断屏蔽位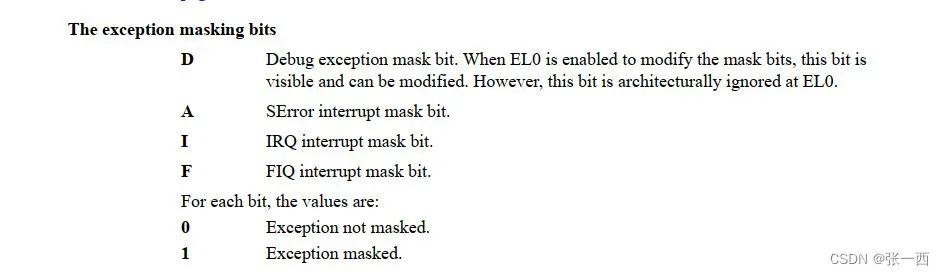 常见的中断控制域如上图所示,
常见的中断控制域如上图所示,
CortexM3/4 单独存在一个寄存器primask,可以屏蔽中断,只有普通中断,没有快速中断(支持嵌套,所以快速与否感觉关系不大,同时进入中断后,硬件自动压栈相关寄存器,也提高了中断速度),在cpsr中没有中断屏蔽相关,
CortexR5以及A53系列中均有这样的中断控制域,可以访问临界资源时屏蔽中断,
模式控制域
CPSR的低五位为模式控制位,控制当前CPU为何种模式,设置各种模式则是为了处理异常以及分层管理,低级无法访问特定资源,而特权模式则可以进行资源上的操作。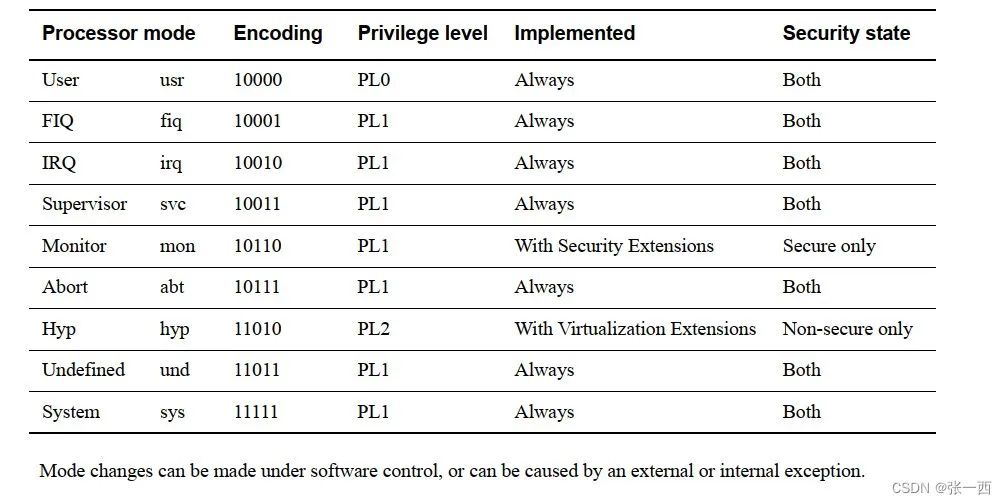
通过写CPSR的低五位,可以控制系统处于何种模式。
通过读CPSR的第五位 也可以知道当前处于何种模式,判断程序发生了什么故障。
| mode | description | restriction |
|---|---|---|
| User Mode | 运行用户程序,非特权模式 ,无法处理异常,除非异常,否则无法改变当前模式 | 对系统资源的访问进行限制(外设以及memory) |
| SVC Mode | 用于系统管理,比如系统下的资源访问,以及OS的调度管理,可以通过软件触发,特权模式 ,执行SVC指令可以进入到本异常,复位之后进入该模式 ,(正常行为,软件触发到) | |
| system Mode | 与用户模式共享所有寄存器,特权模式,不能通过异常进入,(正常行为,软件触发) | |
| Abort Mode | Data Abort或者Prefetch Abort,前者是数据访问出错,后面是取指令错误,特权模式,(异常行为,硬件检测到) | |
| Undefined Mode | 指令相关的异常处理,例如执行到未定义的指令,特权模式,(异常行为,硬件检测到) | |
| FIQ Mode | 特权模式,处理快速中断,(正常行为,硬件触发到) | |
| IRQ Mode | 特权模式,处理普通终端,(正常行为,硬件触发到) |
指令选择域
| T Value | 指令集 | 描述 |
|---|---|---|
| 0 | ARM指令集 | 32位DWORD对齐的指令 |
| 1 | Thumb指令集 | 部分为16位半字(half word)对齐的指令,增加代码密度,减少Image size |
| X | 关联 | 两种指令集可以混合使用,通过状态来表征,比如通过bx 、blx可以切换指令集 |
大小端控制域
| endian state value | 模式 | 描述 | 设置指令 |
|---|---|---|---|
| 0 | 小端模式 | memory 低字节在低位 | SETEND LE |
| 1 | 大端模式 | memory 低字节在高位 | SETEND BE |
执行状态控制域
一些控制系统状态的标志位,比如ARMv8-A系列
| 标志属性 | 描述 | HTML |
|---|---|---|
| SP_ELx | Stack pointer register selected,' | 比如SP_EL0 或者SP_EL3 |
| EL | "异常等级" | “EL0、EL1、EL2以及EL3” |
| SS | 软件单步控制 | for debugger make PE single-step instruction |
审核编辑:汤梓红
-
ARM状态下的通用寄存器有哪些2021-10-21 0
-
寄存器组CM3拥有通用寄存器组和一些特殊寄存器2021-12-16 0
-
ARM I2C 总线接口的寄存器设置2009-03-14 1650
-
寄存器,寄存器是什么意思2010-03-08 21044
-
ARM寄存器详解2010-07-10 2647
-
DSP2812寄存器详解2016-01-08 909
-
arm程序状态寄存器访问指令2017-01-04 525
-
51寄存器的所有寄存器名称,(包括寄存器每一位的作用及用法)资源详解2017-10-16 1068
-
浅谈ARM寄存器组织2017-10-18 939
-
数据传送指令之程序状态寄存器指令简述2017-10-18 1258
-
ARM处理器中的寄存器基本知识详解2017-12-11 16130
-
移位寄存器怎么用_如何使用移位寄存器_移位寄存器的用途2017-12-22 19258
-
寄存器操作方法_对寄存器操作的通用方法总结2018-05-22 20955
-
零基础学ARM:程序状态寄存器访问指令解析2020-12-24 2374
-
CPSR寄存器和APSR寄存器的组成2023-10-20 1797
全部0条评论

快来发表一下你的评论吧 !
