

BUFF传送连的使用调试V1.27版分析
描述
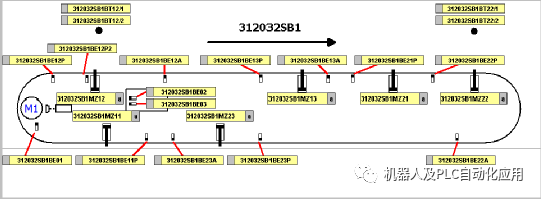
BE23A是存储区3满位的检测开关.
BE12A是存储区1满位的检测开关.
BE13A是存储区2满位的检测开关.
BE22A是存储区4满位的检测开关.
BT12零件检测
BT22零件检测
“SB1SKYP” 释放按钮
通行检测传感器 当小车通过通行检测传感器以及上件积放停止器上无小车时,传感器会将反馈给PLC ,PLC会给出一个可以通行的信号。
PLC将记录小车离开上件区域,一但第一辆小车达到积放停止器,则消除上一个信号。当小车被检测处于上件区域时,此记录会被删除。
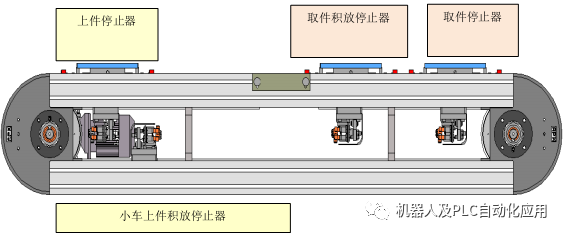
上件区域停止器
上件区域停止器的功能是让小车处于停止状态,直到小车被装上工件后才放行。小车将被锁定在上件区域停止器处,直到满足一定的条件才将小车放行至取件积放区域。条件如下:
(1) 有一辆小车在上件区域停止器处;
(2) 工件已被放置在小车上;
(3) 操作者或者上件机器人给出确认信号;
(4) 上件区域停止器未工作,处于待命状态。
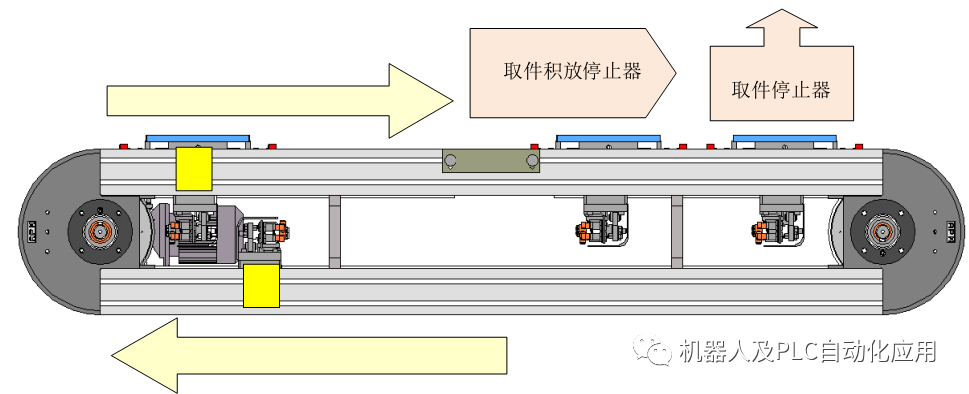
取件区域停止器
小车将被锁定在取件停止器处,直到满足一定的条件才将小车放行至上件积放区域。条件如下:
(1) 取件机器人给出“释放”信号;
(2) 小车处于取件区域停止器处;
(3) 定时(*)信号联通后
(4) 取件区域停止器未工作,处于待命状态。
当小车被检测到离开取件停止器时,该停止器会返回待命状态。
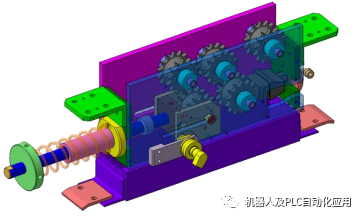
扭矩控制
积放链只要电机没有超载或者驱动器被检测到就有一个有效的信号,以防止过载。
这个信号必须被编写成一个可触发关闭程序来检测和解决积放链的过载问题的形式。
这个信号能连接到其它安装到积放装置安全信号的程序。包括紧急关闭信号、启动开关、安全保险和扫描仪等。
运行时通过一个位于电机区域的传感器检测。这个传感器通常感应电机支撑板的存在。如果电机过载,它沿轴自转直到移出覆盖探测器5°的面积。检测信号的变换,将停止输送工作。
这个信号禁止因为任何原因而关闭。由于此信号关闭而发生故障TUENKERS将不承担对器材、零件、设备或人造成损害的所有责任。
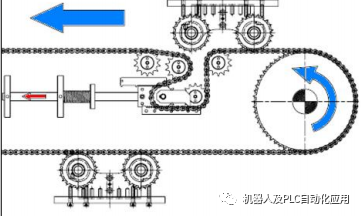
张紧机构
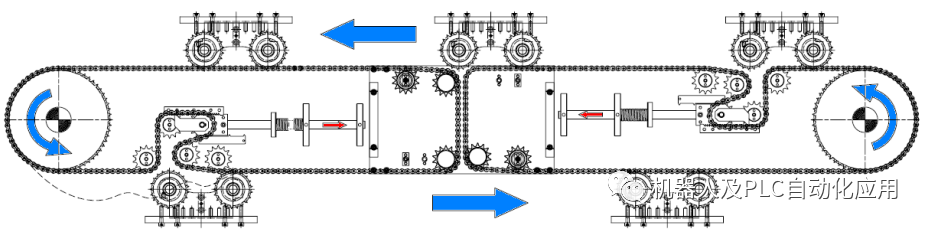
为了保证积放链链条的张紧力,TUENKERS设计了一个动态的张紧机构。
这个装置的组成是基于一个机械系统的动作,通过弹簧的压缩带动调节小齿轮并作用于链条上,从而达到链条张紧松弛。从而延伸链条循环的路径,保持链条在一个恒定的张紧力下。
特别注意镶嵌在板上的刻度尺,刻度尺显示目前链条拉紧的状态。当移动杆的中心,即安装小齿轮的中心,如图1中的位置,链条张紧装置的操作是无效的。
当移动杆的中心在另一侧在如图2中的位置时,为使这个设备能正常使用,当到达这个点时,必须要手工重新张紧,链条行程已经增加,需要重新启动设备。
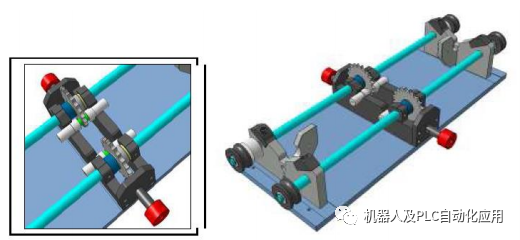
停止器
停止器是一种按照上件、取件和积放位置来定义积放链外形的一种装置。它的功能是确保输送小车停止在一个精确的位置。
它是唯一一个用气动来控制的部件。停止器停止或放行小车的动作,是通过一个双向动作气缸来执行的。
停止器装有检测传感器来检测气缸的打开状态,从而确保有一辆小车停止在停止器上。停止器上还有一个防倒退装置,来保证小车不会在停止器上后退。
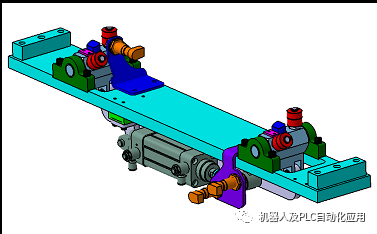
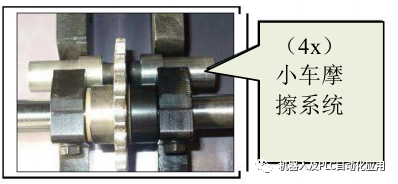
每个小车上的两个链轮处都要各配两个摩擦棒,以保证链轮上的摩擦力。
1.描述:
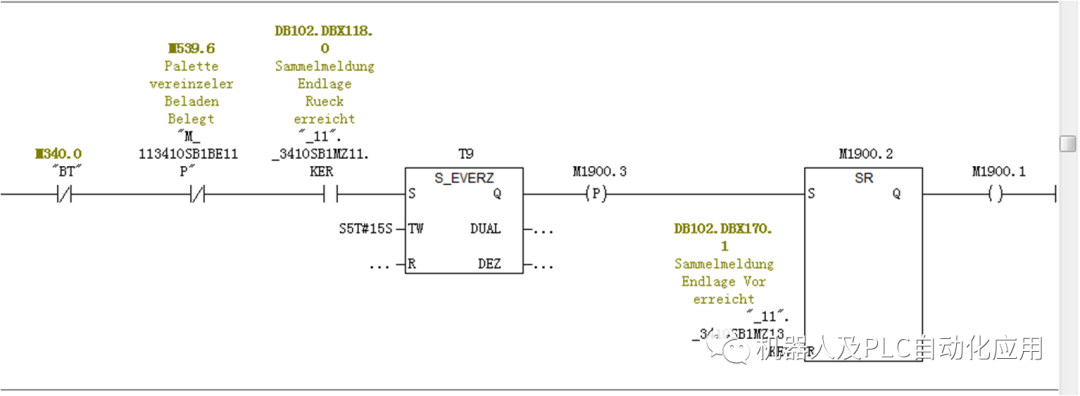
1.MZ11停止器的R是阻挡V是放行,当托盘在MZ11上方时B11P检测托盘,此时MZ12上没有托盘,没有BT12/1和BT12/2(零件检测),这是MZ11伸出V,放行托盘当没有B11P时MZ11立刻返回R.
2.MZ23停止器: 当托盘来到停止器MZ23处时被B23P检测到后,等待MZ11在R位和BE23A信号(存储区满位信号).如果存储区没有满,MZ11在R位则MZ23伸出V,释放空托盘,当B23P检测不到零件时,MZ23返回R.
3.MZ12停止器 :当托盘正在MZ12处 ,挡在 B12P托盘检查开关 ,BT12零件检测开关有件,1区满BE12A检测开关没有被接触,当操作者拍释放按钮时“SB1SKYP”MZ 12伸出V,当B 12P 检测不到托盘后MZ 12返回R 。
4.MZ13停止器 :MZ21在原位R,BE13A第2存储区没满,BE13P上有托盘,此时可以打开MZ13停止器伸出V,BE13P无检测则MZ13返回R
5.MZ21停止器 :BE22P上无挡板,MZ21的BE21处有挡板,机器人发出释放安全信号,MZ22在原位R位,则MZ21伸出V, BE21P无托盘信号检测则MZ21返回R
6.MZ22停止器 :BE22A前方存储区满位无信号,BE22P托盘检测有信号,MZ23在返回位置R,托盘上的零件被拿走SB1/KT22, 机器人发出释放安全信号,则MZ22伸出V放行托盘, , BE22P无托盘信号检测则MZ22返回R
托盘检测的转换.
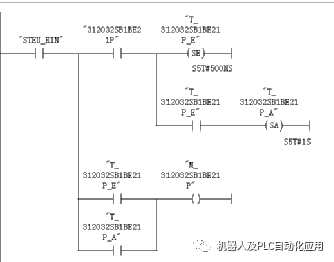
当BEXXP开关检测到零件的时候,先触发延迟接通,在触发延时断开,是为了避免出现托盘在经过时的停止器的误动作,造成夹紧发卡.
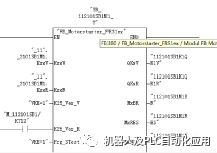
使用FB400控制各停止缸动作.
使用FB476和FB380来控制住电机旋转.
FB476
该模块用于电机的前向或后向行进控制。
电机后向行进控制:
出现实际联锁("Ve_rR" = TRUE) 和释放“ 自动 ” 信号时,电机可在“ 后向 ”(Back)释放信号("Frg_R" = TRUE) 的作用下向后行进。释放“手动” 期间,可在可视化功能中采用实际联锁功能打开电机。
有两个选件可以控制电机后向行进:
按钮 “打开”(On) 已经显示出来 ("Cfg Bit 00"= TRUE) 。
如果“打开”(On) 键显示出来,采用单击操作即可激活该键。
此后,如果按下了键“R”( 后向行进),电机将向后运动(“R” 发绿色闪烁光)。如果再次按“R” ,电机将停止转动(发闪烁光,并停止)。
按钮 “打开”(On) 被隐藏 ("Cfg Bit 00" = FALSE)
如果按钮“ 打开 ”(On)未显示出来,电机将后向行进,直至按钮“R” 被按下并保持不放。松开按钮后,电机将立即停止转动。
电机前向行进控制:
出现联锁 ("Ver_V" = TRUE) 信号和释放“ 自动 ” 信号时,电机可在“ 前向 ”(Front)释放信号("Frg_V" = TRUE) 的作用下向前行进。释放“手动” 期间,可在可视化功能中采用实际联锁功能打开电机。
有两个选件可控制电机前向行进:
按钮 “打开”(On) 已显示出来("Cfg Bit 00" = TRUE)
如果出现了按钮“打开”(On),单击该按钮即可激活该键。此时,按下“V” (前向行进)按钮后,电机将前向行进(“V” 显示为蓝色闪烁)。再次按下“V”, 电机将停止运动(“ 停止” 显示为闪烁状态)。
按钮 “打开”(On) 被隐藏("Cfg Bit 00" = FALSE)
如果未显示按钮“打开” (On) ,则电机只在按下“V”按钮且保持不放的情况下前向行进。 松开按钮后,电机将立即停止转动。
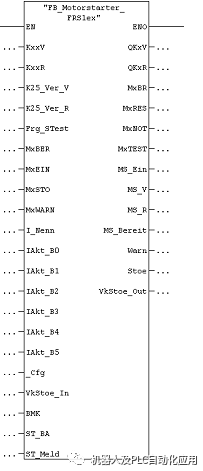
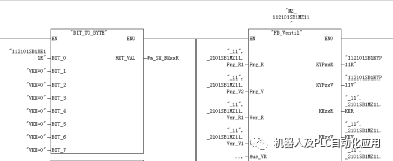
 FB380
FB380
采用该块,可以利用可选 X1/X2 制动器控制装置对 RS1e-x 电机起动器进行控制。
输入:
KxxV BOOL 前向行进使能
KxxR BOOL 后向行进使能
K25_Ver_V BOOL 采用信息画面控制功能对电机前向行进进行联锁
K25_Ver_R BOOL 采用信息画面控制功能对电机后向行进进行联锁
Frg_STest BOOL 分励脱扣/ 起动器断路器自检使能
MxBER BOOL 电机起动器就绪,来自电机起动器
MxEIN BOOL 电机起动器已打开,来自电机起动器
MxSTO BOOL 电机起动器组故障
输出位:
QKxV BOOL 电机起动器前向行进控制
QKxR BOOL 电机起动器后向行进控制
MxBR BOOL 电机起动器制动控制
MxRES BOOL 电机起动器复位控制
MxNOT BOOL 电机起动器紧急启动控制
MxTEST BOOL 电机起动器自检控制 F-RS1e-x
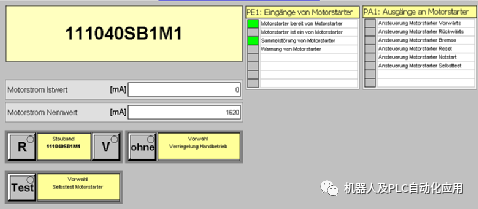
通过6个电流位实现了实际电流读取:
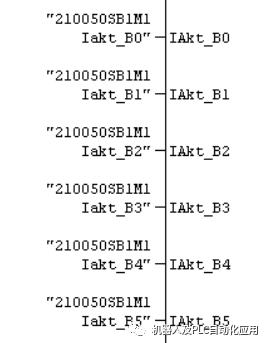
显示实际电流与额定电流

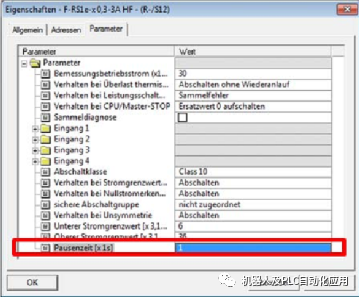
电机起动器空闲时间
该空闲时间是为运行停机(即,不是过载脱扣)后的冷却而定义的时间。该时间结束后,电机起动器的 “热记忆”被设置成 0% 。
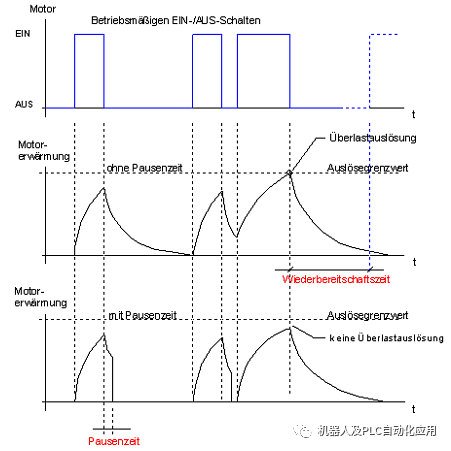
例如,对于以间隔时间定时打开和关闭的输送带(运行时间短),未成功设置空闲时间将可能因触发阈值变化而导致过载故障。
例如,通过设置 1 秒空闲时间避免热模型中因电机温度上升而触发过载。电机必须针对该功能进行相关设计。
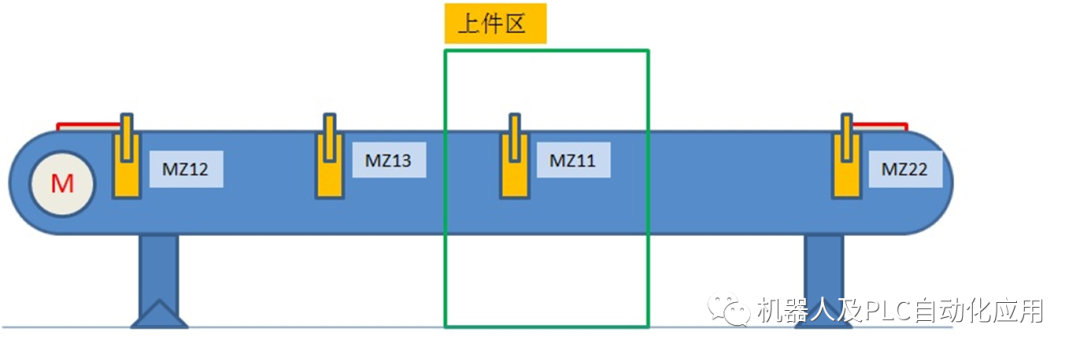
上件区的几种情况:
1.BT11P上有件,BT作为让MZ13释放的接近开关
在板足够长的情况下,BT和BT11P都被当上,可作为触发MZ13V释放的信号。
在板不长的情况下,BT和BT11P的非,可作处发现号释放MZ13V
2.BT11P上没有件,没有件挡住BT此时BT13P需要释放。
需要延时继电器和触发器保存住全无件的状态。用于释放MZ13的信号。
审核编辑:刘清
-
RTC和SD卡buff定义成局部2020-04-01 0
-
1.27BSC是什么意思2010-05-09 0
-
购买了TI 的SensorTag开发套件,现在没有1.27mm的调试线。请问哪里可以找到呢?2018-06-06 0
-
1.27mm分线板的资料分享2022-08-19 0
-
1.27MM间距90度简牛图纸2017-03-16 712
-
1.27MM加高SMD贴简牛图纸2017-03-16 860
-
1.27BOX贴片SMD简牛插座图纸2017-03-16 825
-
1.27MM180度DIP直插简牛图纸2017-03-16 878
-
1.27SMT贴片排针2017-03-17 1261
-
解析BUFF传送连的使用调试2021-05-08 1420
-
BUFF传送连的调试步骤和方法2022-07-08 587
-
Linux sk_buff四大指针与相关操作2022-10-13 3354
-
BUFF传送连的使用调试2022-12-28 353
-
BUFF传送连的使用调试V1版步骤简析2023-01-09 1456
全部0条评论

快来发表一下你的评论吧 !
