

KUKA创建新的SUB程序操作步骤
描述
借助模板创建程
Cell:现有的 Cell 程序,只能被替换或者在删除 Cell 程序后重新创建。
Expert:模块由只有程序头和程序结尾的 SRC 和 DAT 文件构成。
Expert Submit :附加的 Submit 文件 (SUB) 由程序头和程序结尾构成。
Function:SRC 函数创建,在 SRC 中只创建带有 BOOL 变量的函数头。函数结尾已经存在,但必须对返回值进行编程。
Modul:Modul(模块)由具有程序头、程序结尾以及基本框架 (INI 和 2 个 PTP HOME) 的 SRC 和 DAT 文件构成。
Submit:附加的 Submit 文件 (SUB) 由程序头、程序结尾以及基本框架 (DECLARATION、INI、LOOP/ENDLOOP) 构成。
操作步骤
1.在数据列表中选中要创建该程序的文件夹。(不是在所有的文件夹中都能建立程序。)
2. 按下按钮 新。 选择模板 窗口打开。
3. 选中模板 Submit 或 Expert Submit 并用 OK 确认。
4. 输入程序名称,并用 OK 确认。
“Submit” 模板:
Submit 模板用于生成具有以下结构的 SUB 文件:
1 DECLARATIONS
2 INI 初始化部分。用于在启动之后只执行一次的指令。
3
4 LOOP
5 USER PLC
含有 USER PLC 折叠夹的 LOOP 指令。
USER PLC 规定用于要在后台连续运行的程序。
6 ENDLOOP
7 USER SUBROUTINE 用于自定义的子例程
“Expert Submit” 模板:
Expert Submit 模板生成空的 SUB 文件。对 于该模板,所有的都必须由用户自己编程设定。
在编程时使用 LOOP 指令。提交解释器只执行不带 LOOP 指令的 SUB 程序一次。然后自动将其取消。
在 SUB 程序中几乎所有 KRL 指令均可用。但下列指令不可用:
机器人运动指令
机器人运动只能由机器人解释器解释。
因此,从 SUB 程序中也无法作为子程序调用包含运动指令的 SRC 程序。
针对机器人运动的指令
其包括 BRAKE 和所有 TRIGGER。
与此完全相反,附加轴的运动指令可用在 SUB 程序中。
示例: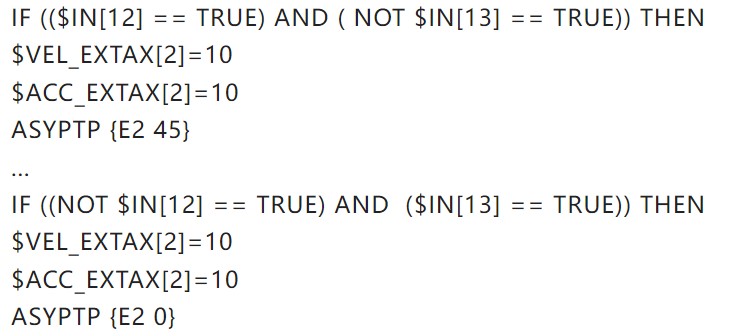
附加轴 E2 根据特定的输入端运动。
在此不使用 WAIT 指令或等待循环,因其包含循环。
提交解释器可以读取访问所有系统变量,也可以写入访问许多系统变量。即使在系统变量同时被一个运动程序使用时,也可访问。
如果在 SUB 程序中更改提交解释器对其无写入访问权限的系统变量,则在启动程序时出现一个错误信息并且提交解释器停止。
在 SUB 程序中常用的系统变量:
| $MODE_OP = 值 | |
| 值 | 说明 |
| #T1 | 机器人控制系统在运行方式 T1 下。 |
| #T2 | 机器人控制系统在运行方式 T2 下。 |
| #AUT | 机器人控制系统在自动运行方式下。 |
| $MODE_OP = 值 | |
| 值 | 说明 |
| #EX | 机器人控制系统在外部自动运行方式下。 |
| #INVALID | 机器人控制系统无定义的状态。 |
| $OV_PRO = 值 | ||
| 元素 | 数据类型 | 说明 |
| 值 (%) | INT | 程序倍率的大小 |
示例: 如果没有达到编程设定的速度,则将输出端 2 设定为 FALSE。
| … IF (($MODE_OP == #T1) OR ($OV_PRO < 100)) THEN $OUT[2] = FALSE ENDIF … |
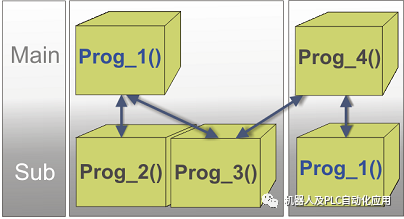
在SUB程序中可以调用用作子程序的程序。可以是:
其他的 SUB程序
不带机器人运动指令的 SRC程序
从程序 SPS.SUB 中可以用 CWRITE 指令和 RUN 调用程序 CELL.SRC。调用只在冷启动时有效。也可以用cwrite指令来调用其他的主程序,可成和Ringo都已用过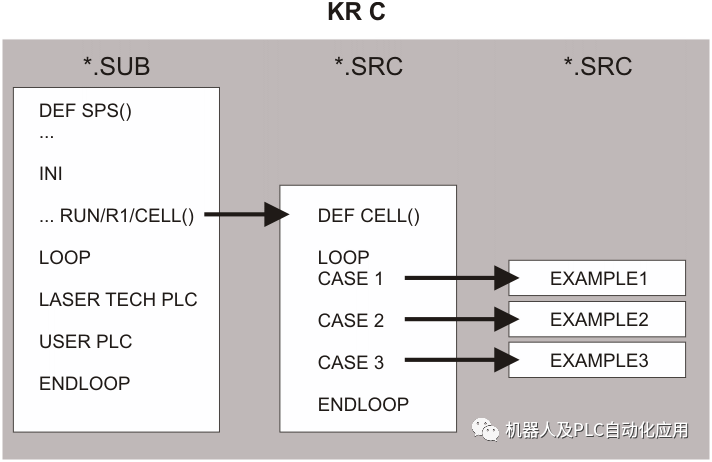
sps.sub 在机器人解释器中选择 CELL.SRC
为了在运行中的运动程序和 SUB 程序之间实现二进制信息交换,可以使用机器人控制系统旗标。旗标由提交解释器设定并且由机器人解释器读取。
审核编辑:刘清
-
大众版KUKA程序的轨迹程序分解2022-07-08 2738
-
窗口看门狗操作步骤程序2021-07-30 0
-
如何创建一个DSP/BIOS程序2010-04-07 757
-
KUKA机器人KRC4操作说明书2015-12-23 1890
-
PLC系统控制电机详细的转换程序和操作步骤2015-12-31 775
-
JDBC的操作步骤和实例2018-02-05 6446
-
KUKA 机器人SPS.SUB程序解析2018-02-09 1773
-
在OrCAD中轻松创建并调整shape的操作步骤详解2020-11-26 4098
-
库卡(KUKA)机器人的操作手册免费下载2021-03-02 2472
-
多负载电源解决方案的创建步骤2021-05-28 616
-
KUKA 8.2系统远程连接步骤介绍2022-07-27 1441
-
KRL指令如何在SUB程序中使用2023-05-23 685
-
更改KUKA机器人系统时间的操作步骤2023-05-29 4821
-
KUKA大众标准与标准版机器人程序的不同2023-06-08 2278
-
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤2023-07-05 4849
全部0条评论

快来发表一下你的评论吧 !
