

使用TDMoP器件的FDL网络环回支持
描述
本应用笔记解释了如何使用Maxim的TDM包(TDMoP)器件支持FDL(设施数据链路)网络环回。本文重点介绍TDMoP产品线,其中包括本文档中称为DS34T10x的几种器件。具体的TDMoP器件包括DS34T108、DS34T104、DS34T102和DS34T101。
介绍
在许多应用中,系统管理员需要使用操作支持系统(OSS)对网络中的元素进行操作和管理控制。使用OSS,管理员可以向“测试头”发出命令,以启用或禁用FDL网络环回。本应用笔记介绍了如何使用DS34T10x系列TDMoP器件实现这些FDL命令。
FDL 环回命令函数
在典型应用中,FDL 环回命令在测试头生成(图 1)。
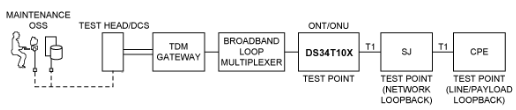
图1.测试头上的FDL环回激活和停用。
测试头被定义为维护系统中的一个组件。每当报告TDM线路故障时,FDL环回都可以用作诊断工具,以确定故障发生的位置。在传统 T1 网络中,TDM 线路物理连接到测试头,以便发出环回命令并评估结果。
在正常运行的网络中,TDM 流量在客户端设备 (CPE) 处终止。考虑图 1 中的示例网络。当检测到网络损坏时,网络将进入维护模式;OSS 的命令将通过 TDM 网关发出,然后通过 ONU 或 ONT 发出。在本示例中,TDM网关支持电路仿真服务(CES),这意味着TDM网关是CES伪线的端点。所有 CES 流量在 TDM 网关终止。ONT 或 ONU 也可以是 GPON 终端,因此需要终止 GPON 流量。在这种情况下,ONU 需要终止从 TDM 网关传输的 GPON 流量和 CES 流量。在图1中,ONU是用Maxim的TDMoP产品实现的。此图中还显示了智能插孔 (SJ),这在许多传统 PDH 网络中很常见。
内部硬件连接
要实现GR-312-CORE标准中定义的网络环回,需要两个FDL命令。
网络环回激活(00010010 11111111) 在 ESF 数据链路上传输的面向位的命令和响应消息将使 SJ 处于维护状态,并将环回接收到的 T1 流量。当环回激活消息的传输停止时,SJ 将保持维护状态。TDMoP 设备将监视位 9 到 14 (001001) 以激活环回命令。
网络环回停用(00100100 11111111) 在ESF数据链路上传输的面向位的命令和响应消息将使连接器处于正常状态,以像中继器一样传递T1流量。当环回停用消息的传输停止时,连接器将保持正常状态。同样,TDMoP 器件将监视位 9 到 14 (010010) 以停用环回命令。
这些环回激活和停用命令可通过DS34T10x器件实现。图2显示了DS34T10x中LIU和成帧器的硬件连接。
要实现环回激活和停用,每个 T1 端口都需要一个额外的 T1 成帧器。如图 2 所示,如果在网络中实现了两个 T1 端口,则还会为成帧器环回 (FLB) 应用实现两个额外的 T1 成帧器。本例使用DS34T104,它包含四个T1端口(两个用于所需的T1端口,两个用于FDL环回支持)。如果需要8个T1端口,可以使用DS26401提供额外的8个成帧器。这些额外的成帧器用于敲击原始成帧器;这些成帧器仅用于环回激活和停用。在图2中,DS34T104用于实现两个T1端口,以生成TDMoP束并提供环回支持。
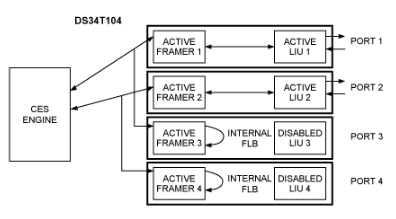
图2.DS34T104环回激活和停用支持应用示例
在图 2 中,成帧器 3 将点击成帧器 1,取帧器 4 将点击成帧器 2。在发送FDL激活和停用代码之前,必须启用此配置。驱动程序和配置可应Maxim的要求提供。
要验证此配置,请配置 FMRTOPISM4 寄存器,如下所示:
设置 FMRTOPISM4。FRMR3 = 000 使得 FRMR3 源来自FRM1
设置FMRTOPISM4。FRMR4 = 001 使得FRMR4 源来自 FRM2
由于FDL仅在T1 ESF成帧模式下工作,因此端口3和4应按如下所述进行配置:
设置TCR3。全聚焦方式 = 0
设置RCR1。RFM = 0
接下来,在发射控制寄存器1中将器件配置为透明模式。
TCR1 = 64h 或 60h,具体取决于是否需要 B8ZS
然后,通过设置接收控制寄存器 3,在成帧器 4 和成帧器 3 上启用成帧器环回。
RCR3.FLB = 1表示成帧器 3 和成帧器 4
需要对端口 3 和端口 4 的接收 BOC 进行编程,通过设置 RBOC 寄存器来检测连续 N 个(N = 1、3、5 或 7)代码:
RBOC[2:1] = 00 表示连续 1 个 BOC 代码,用于有效序列识别 RBOC[2:1] = 01 表示连续 3 个 BOC 代码,用于有效序列识别 RBOC[2:1] = 10 表示连续 5 个 BOC 代码,用于有效序列识别
RBOC[2:1]= 11 表示连续 7 个 BOC 代码,用于有效序列识别
当检测到有效的 BOC 事件时(通过 RLS7.BD 设置所示),应从 RBOC 寄存器中读取 RBOC 消息。然后,根据 RBOC 消息,可以使用 LMCR 寄存器设置环回。
LMCR[2:0] = 010
在Maxim提供的驱动程序中,_te1DrvCTRL函数参数中有一个命令代码,允许发送BOC数据:
TE1DCTRL_T1403TXPKT
TE1DCTRL_T1403TXBOC
与驱动程序(内部和外部)的所有通信都通过agent.c和t1e1_interface.c文件中的简单 API。
传输 BOC 代码的调用将按如下格式设置:
// Call the driver's transmit BOC function
retval &= (*lnPtr->drvCtrl)(DRVREF, TE1DCTRL_T1403TXBOC, ENABLE, (INT)BOC_CODE);
停止传输 BOC 代码的调用格式如下:
// Call the driver's transmit BOC function
retval &= (*lnPtr->drvCtrl)(DRVREF, TE1DCTRL_T1403TXBOC, DISABLE, NULL);
结论
FDL 网络环回激活/停用命令需要在 ONU 元素中受支持。DS34T10x系列TDMoP器件提供模拟环回功能,可实现此功能。当BOC中收到有效的环回命令时,可以相应地启用或禁用模拟环回。DS34T10x产品具有此功能,无需在ONU元件内为DS34T10x提供内部SJ。
审核编辑:郭婷
-
利用TDMoP器件支持FDL网络环回2023-02-09 549
-
dTSEC是否支持远程MAC环回?2023-04-23 0
-
FDL Network Loopback Support U2009-04-20 932
-
延迟线网络回路支持使用TDMoP设备-FDL Network2009-05-07 1008
-
DS34S132与TDMoP器件互操作的实现2011-04-18 1807
-
如何实现DS34S132与其它TDMoP器件的互操作2011-03-20 1439
-
利用Maxim的TDMoP芯片支持FDL网络环回2012-11-22 824
-
如何使用TDMoP器件实现FDL命令2020-12-03 522
-
如何实现DS34S132与TDMOP器件的互操作2020-12-04 533
-
瑞萨RL78添加FDL报错2021-11-30 538
-
使用 TDMoP 设备的 FDL 网络环回支持2022-11-17 82
-
为Maxim的TDMoP器件筛选振荡器2023-02-14 295
-
如何使DS34S132 TDM包IC与其他厂商的TDMoP器件互操作2023-02-21 926
-
如何在TDMoP产品上使用抖动缓冲器来补偿数据包延迟变化2023-03-08 744
全部0条评论

快来发表一下你的评论吧 !
