

 安防雷达助力智慧航运(STS1-13传感器 船舶检测,桥梁防撞,轨迹跟踪)
安防雷达助力智慧航运(STS1-13传感器 船舶检测,桥梁防撞,轨迹跟踪)
电子说
描述
1.产品概述

STS1-13是一款高性价比的安防雷达产品,通过发射24GHz的电磁波,检测物体反射回来的带有多普勒效应的回波完成目标的探测和定位。该产品应用于检测视野内的运动目标(例如人、车、船),汇报他们的距离、方位角和速度信息,支持多个目标同时汇报。基于以上汇报的准确信息,可配合摄像头等光电设备进行跟踪定位、身份识别和事件记录。
安防雷达STS1-13可在多种场所发挥主动探测的作用,例如智慧航运、渔业防护、桥梁防撞、船流量监控、渔政管理等水域的船只探测;变电站、看守所、输油管线等基础设施的安防维护;机场周界安防、铁路沿线安防、公路交通管控等通行设施的监控管制等。该雷达传感器性能优良,价格优惠,接口开放,便于集成商匹配摄像头或红外等设备进行系统集成。
STS1-13安防雷达的主要特点:
1) 收发通道多:3发32收的调频连续波(FMCW)雷达,相控阵体制。
2) 探测威力大:行人稳定探测超过1000米,车辆和船只稳定探测超过2000米。
3) 测量精度高:测角精度可达0.3°,测距精度2米。
4) 支持多个工作频段,可避免同频干扰问题。
5) 支持划定防区,可有效屏蔽核心区域以外的误报。
6) 采用机器学习算法,支持大小目标识别分辨,便于客户针对性筛选目标。
7)雷达原厂支持,接口开放,便于系统集成和定制化开发。
STS1-13安防雷达雷达技术指标:
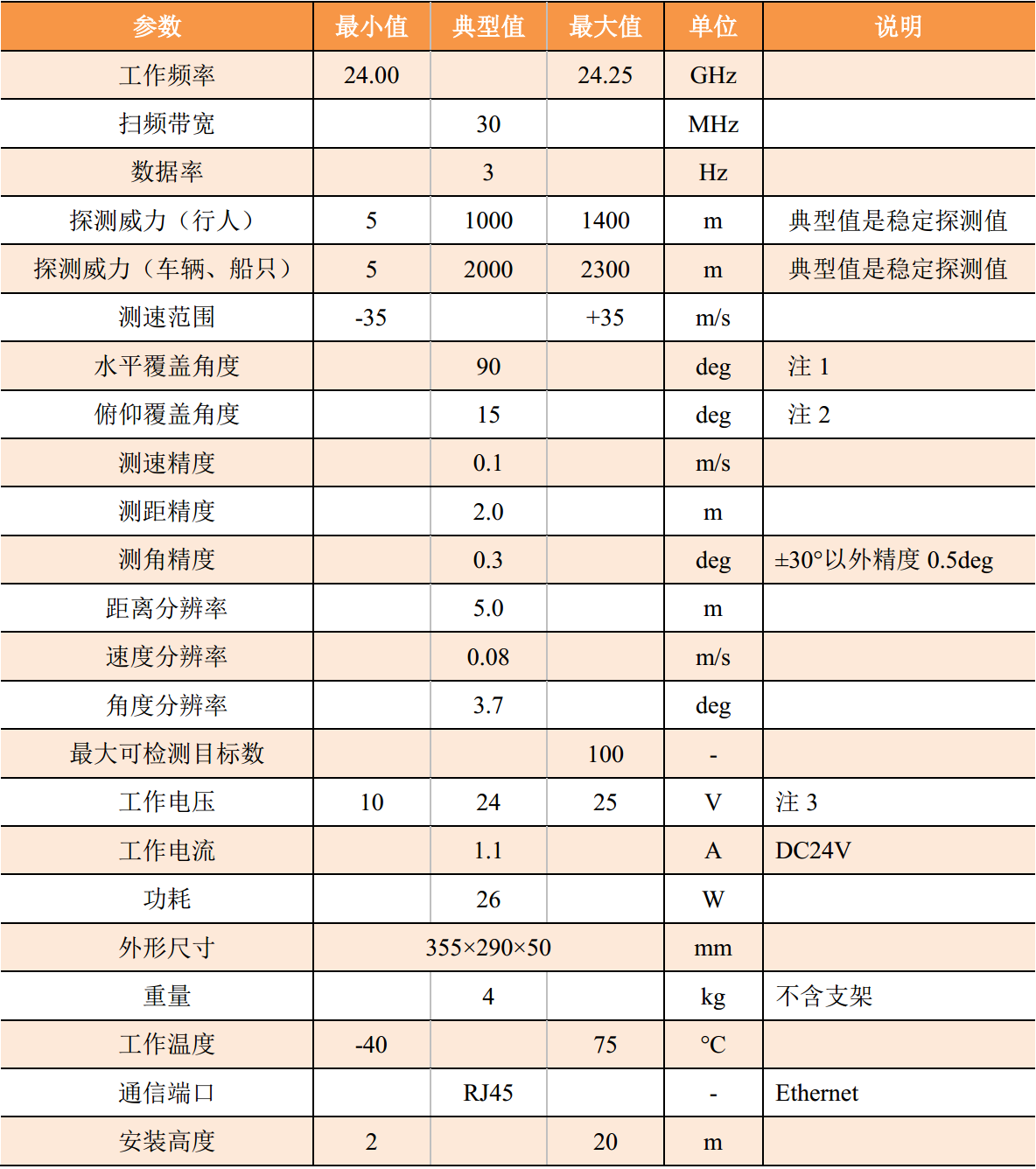
注1:雷达汇报的角度范围可达±60°,以利于近距离大角度的目标发现,但角度越大相应的探测能力和测角精度都会下降。如果需要过滤某些位置的目标,可使用防区功能。
注2:雷达的法线(与前面罩垂直)方向探测威力最大,随着俯(仰)角逐渐增大,其探测能力逐渐下降,当考虑盲区时,还应注意到此时目标距离雷达很近,并不需要很强的能量就可以探测到,所以盲区不用按照这里的标称值计算,可参考下文的列表。
注3:建议供电采用直流24V,如果要用12V供电,需要考虑电源适配器与雷达间的直流电源延长线不宜太长(例如不超过10米),尽量避免由于压降导致的雷达工作异常。产品标配24V适配器。
2.技术特点
安防雷达STS1-13是一款采用调频连续波(FMCW)的相控阵雷达,该雷达采用了3个发射通道和32个接收通道的阵列天线设计。在每个发射波束工作时间内,所有的接收通道接收数据,同时形成多个接收波位(数字波束形成DBF),并在每个波位内进行恒虚警检测(CFAR)形成点云信息,综合运用点迹凝聚(DB-SCAN算法)和联合概率数据关联算法(JPDA)、卡尔曼(Kalman)滤波算法等雷达数据处理算法,最终输出目标信息。扇面的电子扫描(E-scan)过程克服了机械扫描雷达的寿命短的问题。
当发射波位的指向改变时,对应地调整接收通道的相位因子,从而接收波位也完成相对应的指向,这样配合的工作方式,使得雷达收发信号的指向性更强,能量更集中,从而增强雷达的探测能力;加上SFC(灵敏度频率控制)电路的作用,雷达可以具备高动态(HDR)范围,可适用于不同场景下的目标探测;同样得益于合成的窄波束的设计,提升了雷达抗干扰和抗多径的能力。
2.1雷达坐标系
雷达汇报的目标位置信息,是以雷达所在位置为坐标原点的。
(1) 雷达正前方为Y轴(对应目标的纵向距离),与Y轴垂直的是X轴(对应目标的横向距离)。Y轴左侧的目标横向距离为负数,Y轴右侧的目标横向距离为正数。
(2) 假设图中目标A在远离雷达,其X0 = -3米(注意是负数),Y0 = 50米,速度v=1.5m/s(远离目标的速度为正)。 则目标距离雷达的径向距离R为50.1米。角度φ=arctan(-3/50) = -3.4°(注意目标在左侧,角度为负数)。
定制开发下,可输出目标的经纬度信息。
3.实测效果
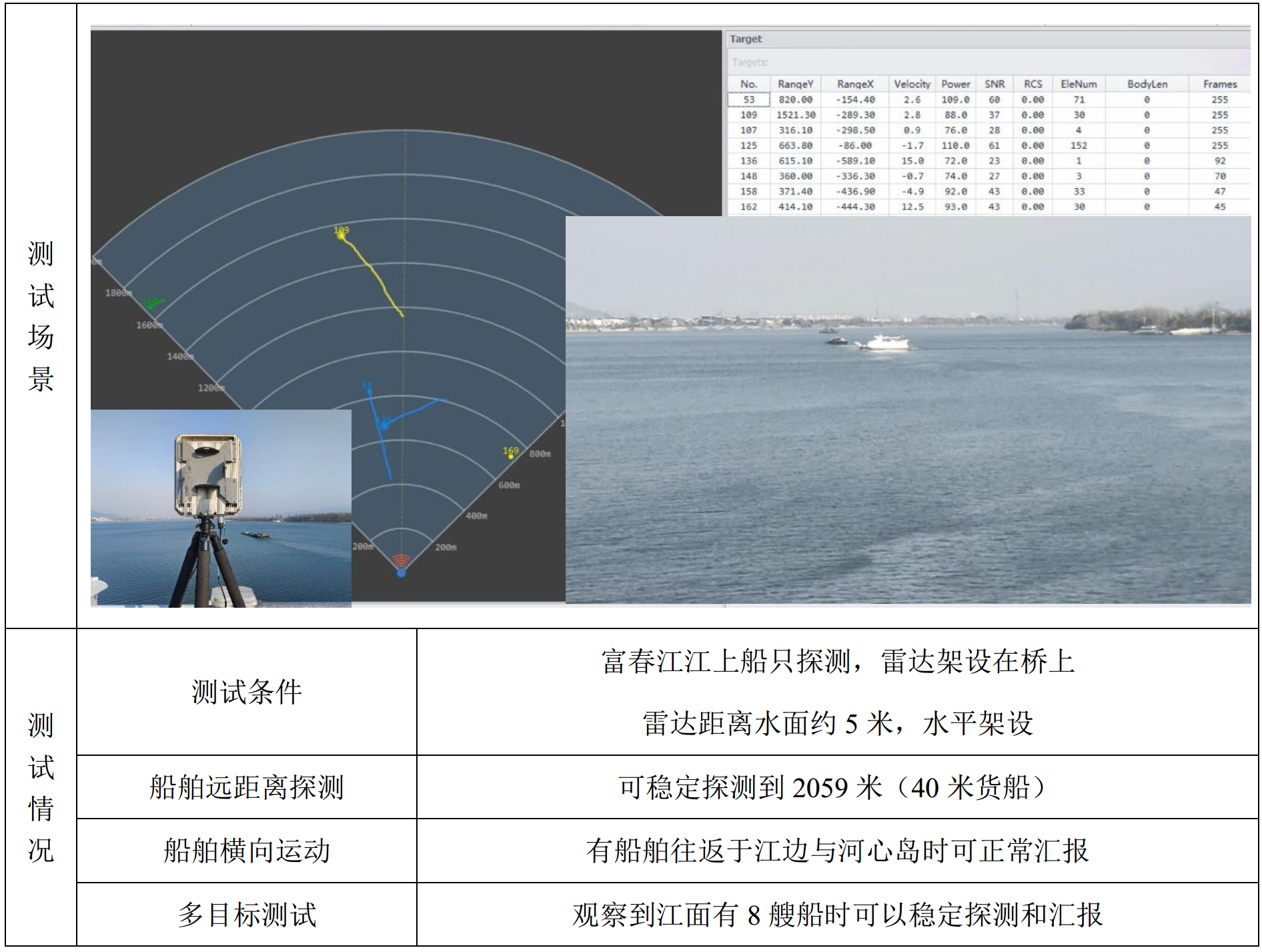
STS1-13船只探测效果,探测距离超过2000米
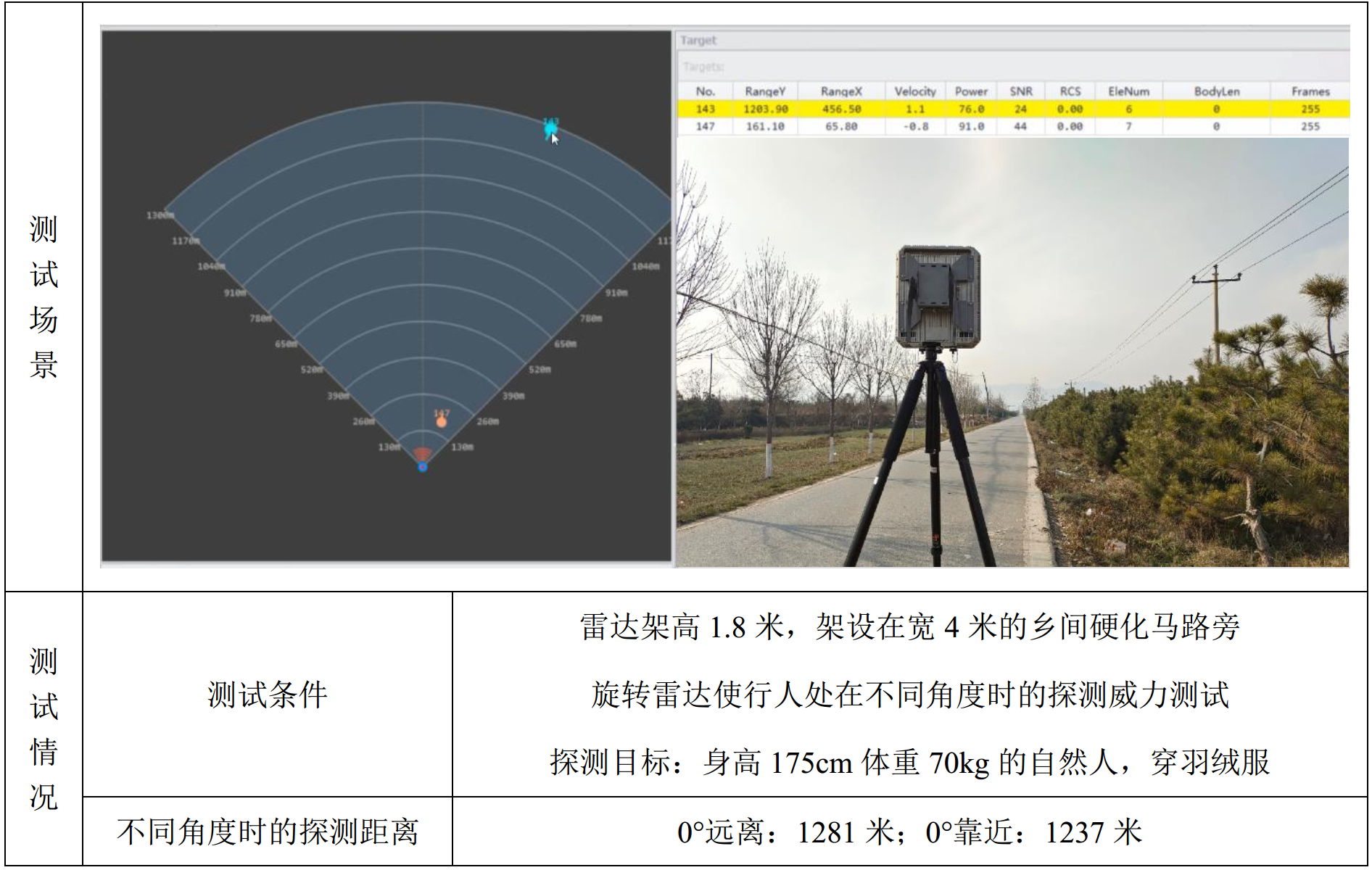

STS1-13行人探测,探测距离超过1000米
附录:STS1-13产品解读
问:STS1-13定位的应用方向是什么?
答:在水域和陆地都可应用。雷达作为智能感知的重要技术手段,可为智慧航运提供基础性原生信息。充分挖掘这些信息,将有利于船舶运行数据采集、航道船流量信息统计、船只航线跟踪和智能驾驶,以及航道规划辅助决策等大数据信息的搜集工作。将雷达技术与水运行业深度融合,可推动水上交通运输领域新型基础设施的建设。另外在水上执法、缉毒缉私、打击跨境偷渡等公安方向也可应用。在陆地应用方面,STS1-13可用于关键基础设施的周界安防、行人入侵探测,或者要地防护等。典型应用例如机场周界安防、铁路沿线安防、油气管线防护等。
问:这款雷达有什么特殊之处吗?
答:STS1-13有多达32个接收通道,探测威力大,测角精度高;采用24GHz成熟的软硬件设计,批量化生产,性价比非常高。
32个通道进行数字波束形成(DBF),合成波束宽度约为3.1度,相当于雷达将能量集中到3.1度这么小的角度范围内,所以探测能力更强。当然雷达需要同时进行很多个波束的计算,才能实现大角度的覆盖能力,超高算力的信号处理能力,是开发工作的关键环节。
测角精度取决于雷达的波束宽度和目标的信噪比(SNR),在探测能力大(SNR高)的情况下加上波束宽度窄(只有3°,受其他角度杂波的影响小),所以测角精度也很高。
问:这款产品的实际探测能力的确能到参数表中的标称值那么远吗,有没有虚标?
答:没有虚标。事实上这款雷达的探测能力是超过标称的典型值的,不过的确存在应用场景不同时探测威力有差异的情况,这在有大型反射物或较多金属反射物的场景中尤其明显。一个面积A=2m×2m的公路路牌,其雷达截面积(RCS)约等于1.3×106m2,而一个人一般我们按照RCS=0.5m2计算,两者相差非常大,大反射体带来的回波太强,会导致雷达系统由于相噪引起的底噪抬高,从而降低弱目标的SNR,当SNR低于门限时小目标就检测不出来了。
STS1-13采用优化了环路参数的射频链路,尽最大可能地降低了不同场景下的差异性。另外产品规划设计时,充分考虑到了这一问题,所以实测空旷场景下明显优于列写的典型值,复杂环境下也能满足定义值。
问:这款雷达可以汇报目标的哪些信息?
答:STS1-13可以实时汇报目标相对于雷达的横向距离、纵向距离、速度(运动方向)、信噪比,和探测到的目标长度信息。从雷达发出电磁波,到检测和汇报目标出来,整体的时间延迟小于0.5秒,信息更新速率大约是3次/秒。雷达默认是以自身为坐标原点的,正前方是Y轴(前后算是纵向距离),左右是X轴(代表横向距离)。雷达汇报的信噪比和目标长度信息可作为目标大小的判定依据。
如果必要,可定制化开发,支持目标的经纬度信息汇报。部分客户有发现目标后开关量控制需求,可以按需定制。
问:在实际场景下,如何考虑安装位置呢?
答:考虑河流上安装的情况,其他场景类似。
如果在河岸上安装,雷达的法线应与河流方向30-60°夹角,注意不要让雷达法线垂直照向对岸。原因是如果一个目标在雷达前面横穿,那么他面向雷达的速度非常小(理想的横切运动,其面向雷达的速度为零),常常与静止地物杂波混到一起,不利于目标检出,此时如果强制检出,可能误报也会增多。
问:STS1-13可以测量多大速度的目标呢?
答:速度上限是,雷达可以测量到±120km/h的目标,正负号代表远离或靠近的运动方向。速度下限是±2km/h(约±0.6m/s),更低速度的目标,雷达也具备一定的探测能力,但由于需要过滤掉接近零速的地物杂波(即滤除极低速的误报),所以弱目标的检出率将会明显下降。
注意这里的速度值都是指目标面向雷达的速度值,这个值小于等于目标的真实速度,见下图。
问:有的厂家用到77GHz或80GHz的雷达,STS1-13选用24GHz频段基于哪些考虑呢?
答:目前大多数国家(含中国)已经将76-79GHz划分给汽车雷达专用,从法规上说,再将这个频段用于其他用途都是不合规的。79-81GHz这个频率段主要发达经济体也在考察用于汽车雷达,目前没有明确的法规指定应用方向,仍存在不确定性。而24.0~24.25GHz是已经划分好的全球通用的ISM频段,可放心使用。
77-80GHz频段的空衰比24GHz严重,在公里级雷达中这一点逐渐突出出来,而且探测距离越远,差距越明显。
从现有的技术能力来说,77-80G频段的射频部分输出功率偏低(例如13dBm),这么高频率的功率放大器件成本较高,一般雷达厂家不会选用,转而考虑使用多发射通道(例如TDM或DDM技术),但整体提升有限,汽车雷达目前用这类器件做出的产品测车距离大约是300-500米(20°视野);24GHz频段则有更为成熟的产业链,功率放大部分可达27dBm,同样可考虑多通道设计,加上几十个接收通道的接收机,雷达探测威力明显更强。
(感谢阅读,欢迎集成商接洽合作!)
审核编辑 黄宇
-
STS1-4M#安防雷达测试视频,行人150米车辆300米船只300米雷达探测周界安防船只探测桥梁防撞航迹跟踪jf_35623168 2022-12-04
-
24GHZ雷达传感器的选型及运用基础2013-12-20 0
-
低成本24GHZ雷达传感器倒车雷达/变道辅助用解决方案2014-01-03 0
-
车用低成本24GHZ雷达传感器/测速/测距/测方向2014-01-03 0
-
【RSP1多普勒雷达传感器申请】车载相控阵防撞雷达系统2016-01-11 0
-
雷达传感器的新型热门应用2018-11-08 0
-
基于多传感器的多模型机动目标跟踪算法设计2018-12-05 0
-
非接触式工业雷达传感器开启应用创新浪潮2019-06-24 0
-
《干货|选取传感器实现智慧厕所流量及蹲位检测?(内含实测报告)》2020-03-24 0
-
物联网设备感应技术,微波雷达传感器应用,雷达存在感应模块2021-08-09 0
-
雷达传感器技术,微波雷达感应模块,在物联网设备的发展应用2021-09-01 0
-
微波雷达传感器模块,智能卫生间技术应用,人体存在感应雷达2021-09-07 0
-
智能安防毫米波雷达感应模块,智慧传感雷达技术应用2021-09-15 0
-
毫米波雷达感应模组,智慧停车位探测技术方案,提升停车空位利用率2021-10-14 0
全部0条评论

快来发表一下你的评论吧 !
