

Two-box方案‘ESC+eBooster’在自动驾驶中的应用
电子说
1.2w人已加入
描述
根据制动执行机构的不同,线控制动系统(Brake-By-Wire)可以分为液压式线控制动系统(Electro-Hydraulic Brake, EHB)和机械式线控制动系统(Electro-Mechanical Brake, EMB)。其中,EHB 以传统的液压制动系统为基础,用电子器件替代了部分机械部件的功能,使用制动液作为动力传递媒介,同时具备液压备份制动系统,是目前的主流技术方案。而EHB根据集成度的高低,EHB 可以分为Two-box 和One-box 两种技术方案。 随着新能源汽车市场的扩张,“eBooster+ ESC”组合成为了目前市场上最主流的Two-box方案。该方案除了实现基础的制动助力功能和稳定性控制功能外,还能在实现制动能量回收的同时协调配合,保证在电制动和液压制动的切换中实现驾驶员的踏板感一致。 另一方面,线控制动也是支撑汽车走向更高级别自动驾驶的制动系统的必经之路。随着高阶辅助驾驶系统和自动驾驶系统(包括自主泊车)的普及,“eBooster+ ESC”作为当前市场上主流的制动冗余解决方案,有了更大的发挥舞台。
1. 自动驾驶系统对制动系统的要求
自动驾驶汽车的核心是冗余设计,这是业界达成的共识。在SAE J3016对汽车自动驾驶分级标准基础上可以进行进一步归类:- 辅助驾驶汽车 (包含Level1 / Level2)
- 自动驾驶汽车 (包含Level3 / Level4 / Level5)
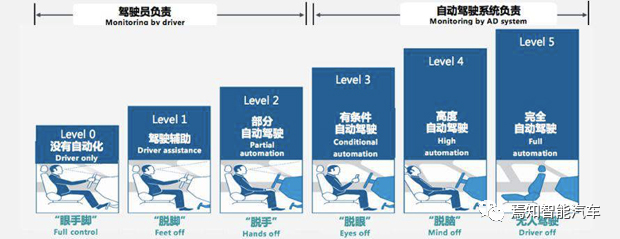 SAE J3016对汽车自动驾驶分级标准
辅助驾驶汽车和自动驾驶汽车最大的区别在于系统故障导致事故的责任方的不同:
SAE J3016对汽车自动驾驶分级标准
辅助驾驶汽车和自动驾驶汽车最大的区别在于系统故障导致事故的责任方的不同:
- 对于辅助驾驶,当系统出现故障以后,只要正确向驾驶员报告了故障,接下来能否脱险全看驾驶员的水平,出了事故责任方在驾驶员,汽车厂家是没有责任的。
- 对于自动驾驶,系统在出现故障之后,需要系统来自己操作避免事故(自动驾驶等级越高,驾驶员可以越晚介入接管甚至是完全不用接管),出了事故是汽车厂家的责任而不是驾驶员的责任。
| 冗余系统要素 | 原因 |
| 供电系统冗余 | 当单一链路出现信号中断,系统可实现信息的无缝安全衔接 |
| 通讯冗余 | 主电源失效后,备份电源能够支撑ECU完成安全降级动作 |
| 感知冗余 | 多传感器数据融合技术可以保证车辆行驶构成中精准实现物体及行人的识别,从而支持车辆时刻做出正确的控制行为 |
| 上层决策系统冗余 | 两个大脑互相监督、互为备份,主大脑故障发生时,备份大脑及时接管 |
| 制动冗余 | 主制动系统失效后,备份系统依然提供一定的制动能力来维持制动控制及制动稳定性控制 |
| 转向冗余 | 如果故障发生后的安全状态定义为继续运行而不是刹停,那么当一路转向系统故障后,备份系统需要能够支持车辆完成接下来的运行场景中的转弯工况 |
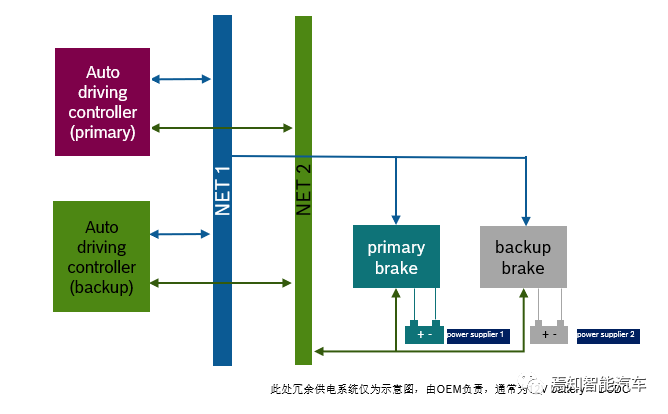 HAD系统制动冗余E/E架构示意图,图片来自网络
除了高速自动驾驶,自主泊车技术也是国内外汽车生产厂商不断研究的对象,且遥控泊车(RPA, Remote Parking Control)和自主代客泊车 (AVP, Automated Valet Parking)相继落地。RPA允许驾驶员下车并通过遥控(车钥匙或手机APP)激活,整个泊车过程完全由系统自主完成,不过一般仍然要求驾驶员在车辆距离车辆一定范围内(欧盟法规ECE-R 79要求半径不超过6m)。AVP则被认为是解决用户“最后一公里自由”痛点的最优技术方案,简单来讲AVP提供以下两大功能,完全满足了大众对自主泊车的终极想象:
从实现方式上来看,各个厂家的RPA和AVP方案千差万别,呈现出多样化的态势,但是如果单看对泊车过程的应急处理的方式,大家又都殊途同归,无一例外地执行紧急刹车。这一处理方式对泊车场景来说合理且易于实现,因为RPA和AVP最大运行速度不超过15kph,快速刹停车辆能够避免碰撞事故或者将碰撞速度降到很低从而降低碰撞伤害。
这样一来,RPA和AVP对冗余的要求相对高速自动驾驶要低一些,但是制动冗余仍然是不可或缺的。
HAD系统制动冗余E/E架构示意图,图片来自网络
除了高速自动驾驶,自主泊车技术也是国内外汽车生产厂商不断研究的对象,且遥控泊车(RPA, Remote Parking Control)和自主代客泊车 (AVP, Automated Valet Parking)相继落地。RPA允许驾驶员下车并通过遥控(车钥匙或手机APP)激活,整个泊车过程完全由系统自主完成,不过一般仍然要求驾驶员在车辆距离车辆一定范围内(欧盟法规ECE-R 79要求半径不超过6m)。AVP则被认为是解决用户“最后一公里自由”痛点的最优技术方案,简单来讲AVP提供以下两大功能,完全满足了大众对自主泊车的终极想象:
从实现方式上来看,各个厂家的RPA和AVP方案千差万别,呈现出多样化的态势,但是如果单看对泊车过程的应急处理的方式,大家又都殊途同归,无一例外地执行紧急刹车。这一处理方式对泊车场景来说合理且易于实现,因为RPA和AVP最大运行速度不超过15kph,快速刹停车辆能够避免碰撞事故或者将碰撞速度降到很低从而降低碰撞伤害。
这样一来,RPA和AVP对冗余的要求相对高速自动驾驶要低一些,但是制动冗余仍然是不可或缺的。
| 冗余系统要素 | RPA/AVP是否需要? | 原因 |
| 制动控制冗余 | 强制 | 当一路制动系统失效时需要另一路接管 |
| 供电系统冗余 | 强制 | 两个制动系统共用一套供电存在共因失效 |
| 通讯冗余 | 不必要 | 主制动系统或备份制动系统任何收不到通讯信息都可以执行紧急刹停,两路制动力叠加没有风险 |
| 上层决策系统冗余 | 不必要 | 上层系统故障,主制动系统可以直接紧急刹停 |
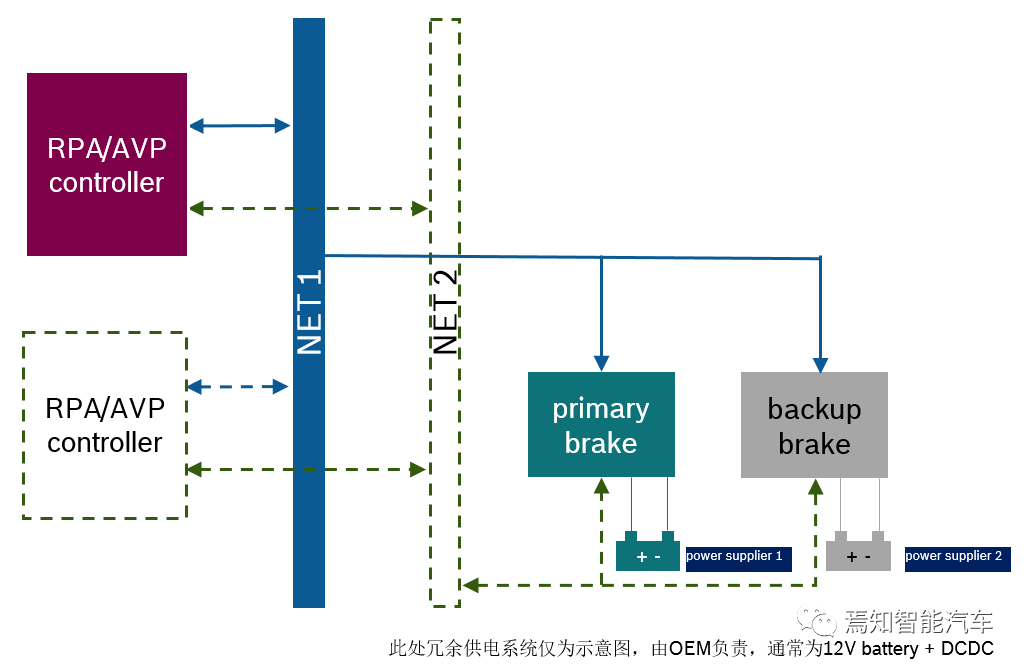 RPA/AVP系统制动冗余E/E架构示意图,图片来自网络
RPA/AVP系统制动冗余E/E架构示意图,图片来自网络2. ESC+eBooster制动冗余方案介绍
前文已经介绍,在自动驾驶之前,市场上就有很多新能源车型同时搭载ESC和eBooster系统,目的是使用eBooster实现更佳的回收性能。ESC和eBooster在车上共用一套液压系统,两者协调工作。 因此,不同于自动驾驶系统(HAD/RPA/AVP)中其他冗余系统的设计,制动冗余无需额外增加电控产品,只要在现有的ESC和eBooster基础上稍加改动即可,既简洁又省钱。也正因为如此, ESC和eBooster成为了目前市场上支持自动驾驶的冗余制动方案的黄金组合,广泛运用于主流智能驾驶车型上,如Tesla全系、蔚来ES8、小鹏P7、理想ONE、长安UN-T、长城摩卡以及极氪001等。 自动驾驶要求制动系统除了有当前制动系统的正常状态下的能力之外, 还要有故障快速侦测能力、执行机构的自检能力、故障发生时执行机构的快速选择能力,要求车辆具有纵向稳定性冗余、可转向性(防抱死)冗余,还有车辆的减速冗余。这就需要车辆有两套制动系统,具有额外的监控功能,冗余的模式控制和纵向稳定性控制。 基于eBooster和ESC系统组合开发的支持自动驾驶的冗余制动系统,ESC和eBooster分别连接一套相互独立的供电系统,且冗余上层控制单元分别控制ESC和eBooster。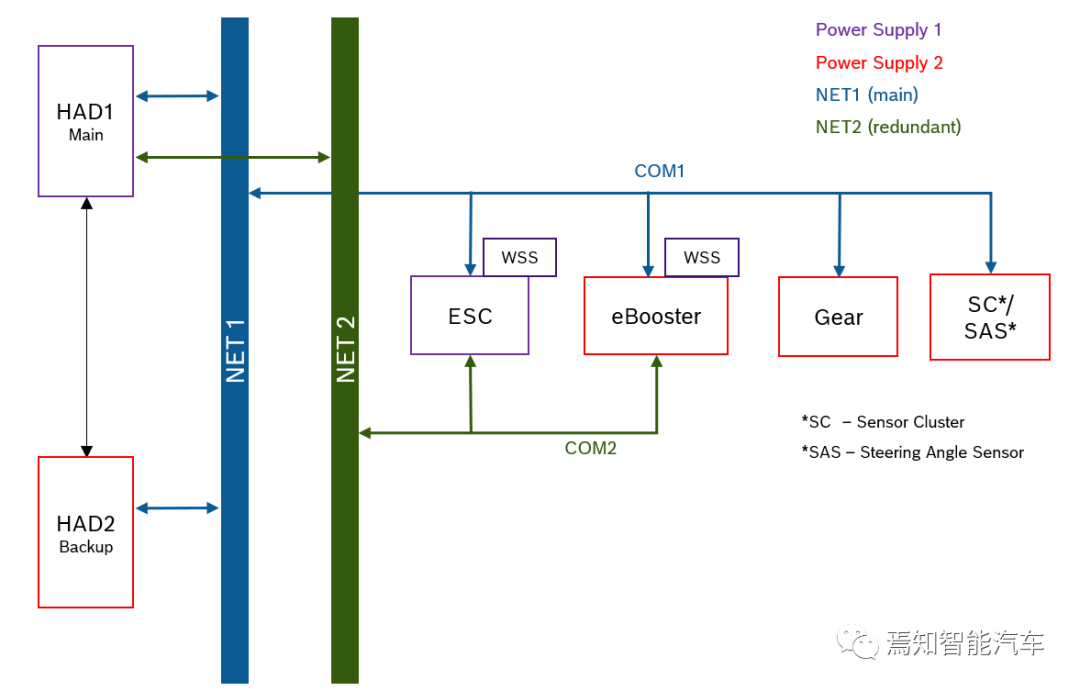 ESC+eBooster制动冗余系统E/E架构示意图,图片来自网络
ESC和eBooster均能在整个减速范围内独立的对车辆进行制动。考虑到eBooster建压的动态响应速度比ESC主动建压更快,且NVH表现更好,因此eBooster是冗余制动系统中的主执行机构。这对黄金组合的控制和接管策略可以总结如下(策略不唯一,根据上层控制单元的控制策略可能有调整):
ESC+eBooster制动冗余系统E/E架构示意图,图片来自网络
ESC和eBooster均能在整个减速范围内独立的对车辆进行制动。考虑到eBooster建压的动态响应速度比ESC主动建压更快,且NVH表现更好,因此eBooster是冗余制动系统中的主执行机构。这对黄金组合的控制和接管策略可以总结如下(策略不唯一,根据上层控制单元的控制策略可能有调整):
| 场景 | 制动执行控制器 |
| 无故障 | eBooster |
| 上层主控制单元故障 | ESC |
| 上层备份控制单元故障 | eBooster |
| 主网络故障 | ESC |
| 备份网络故障 | eBooster |
| ESC故障 | eBooster |
| eBooster故障 | ESC |
| 场景 | 稳定性功能执行单元 |
| 无故障 | ESC: full ABS (基于四个轮速传感器单轮控制) |
| eBooster故障 | ESC: full ABS (基于四个轮速传感器单轮控制) |
| ESC单个轮速故障 | ESC: ABS degraded (基于三个轮速传感器单轮控制) |
| ESC两个及两个以上轮速故障 | eBooster: SBS (基于四个轮速传感器单轴控制) |
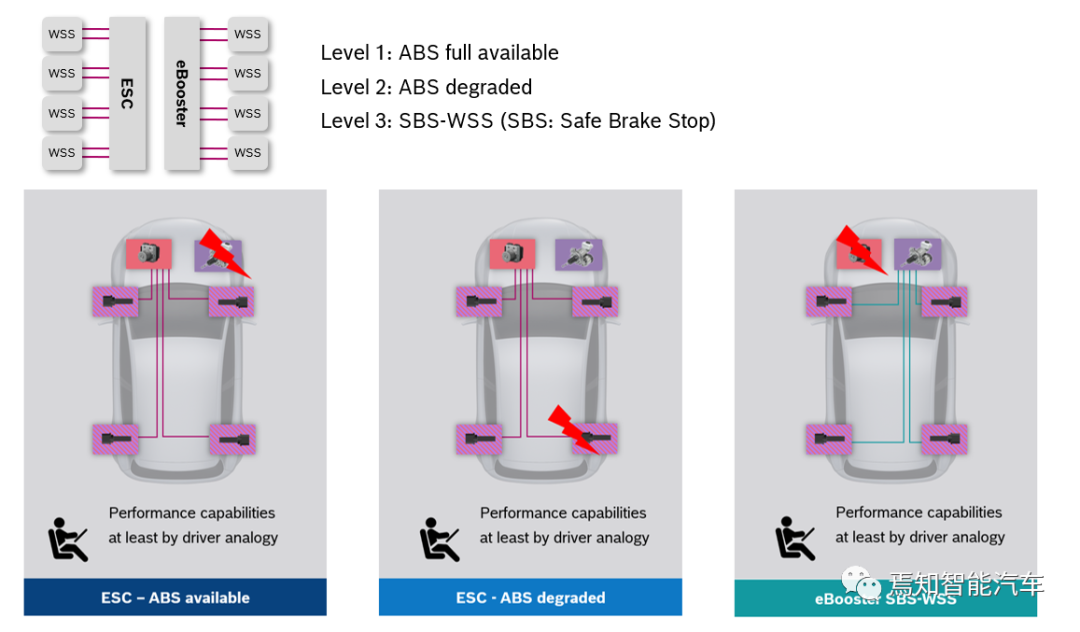 博世ESC+eBooster制动纵向稳定性冗余方案示意图,来自网络
博世ESC+eBooster制动纵向稳定性冗余方案示意图,来自网络
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 0
-
自动驾驶真的会来吗?2016-07-21 0
-
自动驾驶的到来2017-06-08 0
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 0
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 0
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 0
-
如何让自动驾驶更加安全?2019-05-13 0
-
智能感知方案怎么帮助实现安全的自动驾驶?2019-07-31 0
-
自动驾驶汽车的处理能力怎么样?2019-08-07 0
-
自动驾驶汽车中传感器的分析2020-05-14 0
-
转发:聊聊边缘计算在自动驾驶中的应用场景2020-07-21 0
-
如何保证自动驾驶的安全?2020-10-22 0
-
UWB定位可以用在自动驾驶吗2020-11-18 0
-
自动驾驶车辆中AI面临的挑战2021-02-22 0
-
自动驾驶技术的实现2021-09-03 0
全部0条评论

快来发表一下你的评论吧 !
