

小米足式机器人专利曝光:前后双弹簧设计
描述
近日,北京小米移动软件有限公司“足式机器人的小腿结构和足式机器人”专利获授权。
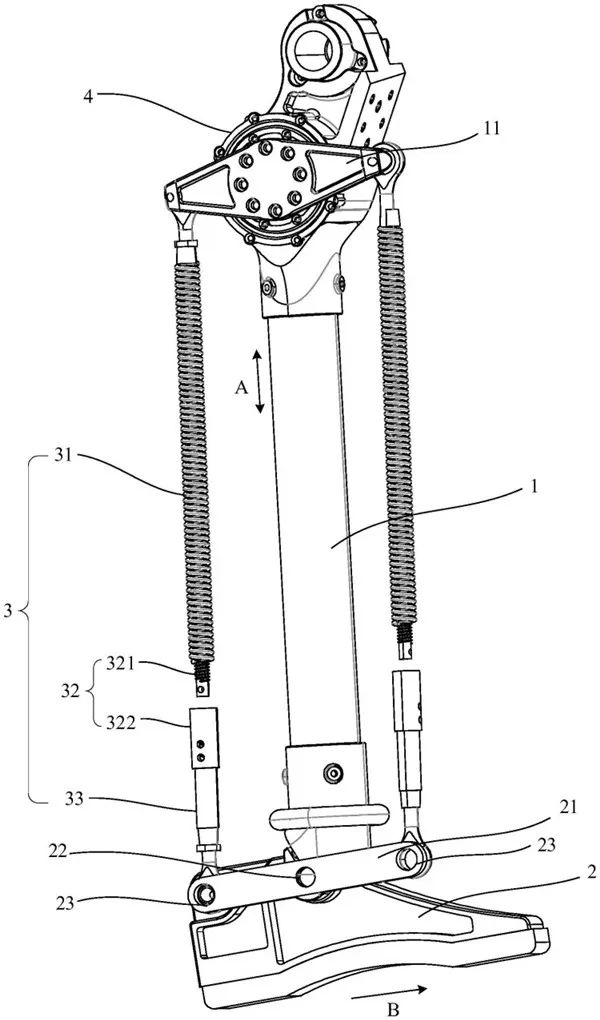
企查查专利摘要显示,该专利属于足式机器人技术领域,该足式机器人的小腿结构包括:腿部杆、足部和弹性连接机构,所述腿部杆的第一端与所述足部的第一位置可枢转地相连,所述弹性连接机构位于所述腿部杆的侧方,所述弹性连接机构与所述腿部杆的第二端相连,且与所述足部的第二位置相连。
通过在腿部杆的侧方设置弹性连接机构,弹性连接机构与腿部杆相连,且与足部相连,在足式机器人运动的过程中,弹性连接机构可以有效地吸收足部处产生的震动,提高机器人运动的稳定性,并减小震动对机器人造成的冲击,避免震动对机器人造成损坏。
去年8月,小米就曾发布了首款人形机器人“铁大(CyberOne)”,身高177厘米,体重52公斤,是一款全尺寸人形仿生机器人。官方表示,铁大背后的智能、机械能力,全部由小米机器人实验室全栈自研完成,相比之前的机械狗,它的研发难度更高。
官方同时表示铁大具有高情商、可感知人类情绪,视觉敏税、可对真实世界三维虛拟重建,“小脑”发达、可实现双足运动姿态平衡,四肢强健、动力峰值扭矩300Nm等领先能力。

审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
六足机器人2013-06-06 0
-
基于安芯一号SLH89F5162芯片的双足机器人2013-09-28 0
-
双足机器人2013-11-25 0
-
【深联华杯】双足机器人2014-01-02 0
-
stm32红外六足机器人2014-03-27 0
-
【Embedded Pi申请】六足机器人的创新研发2015-11-25 0
-
【mBot申请】双足行走机器人设计2015-11-30 0
-
什么是龙人四足机器人?2016-03-24 0
-
ColorSky双足机器人开源项目2016-04-21 0
-
四足仿生机器人2016-08-19 0
-
足式机器人经典资料2017-12-11 0
-
四足机器人2018-09-29 0
-
求六足机器人的图纸2019-03-26 0
-
四足机器人的机构设计2021-09-15 0
全部0条评论

快来发表一下你的评论吧 !
