

STM32F103定时器PWM驱动步进电机加减速
描述
背景
之前学习了定时器的一些基本知识,实现了1ms的定时,本次学习定时器的PWM功能,用定时器产生的PWM波作为步进电机的脉冲频率,实现步进电机转动控制,并实现电机S型曲线的加减速控制。
步进电机基本知识
步进电机根据接线关系分为双极性和单极性,单极性两组线圈中间有抽头,接电源;而双极性的线圈中间无抽头。本次实验采用双极性42步进电机,24V供电。
步进电机外观图
电机驱动原理图及控制接线关系
本次电机驱动芯片采用TOSHIBA的TB67S109AFTG芯片来驱动双极性步进电机,该芯片支持最大驱动电压为50V,最大驱动电流为5A,最大支持32细分。
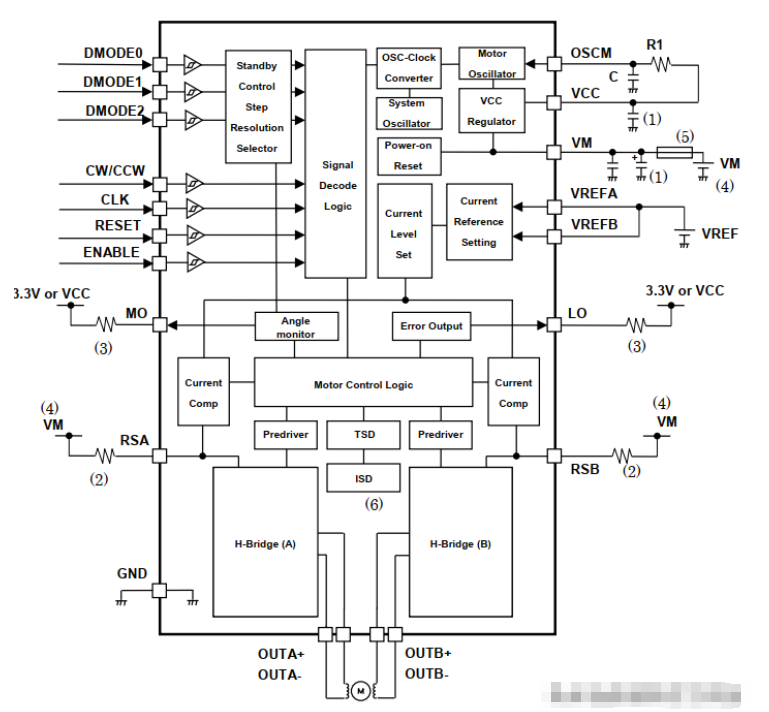
驱动电机原理图
接线关系
细分控制引脚分配
DMODE0 -----> PB0 DMODE1 ------> PB1 DMODE2 ------> PB2
电机正反转控制引脚
CW/CCW----> PC0
驱动芯片使能控制引脚
ENABLE ---->PC1
电机步进时钟PWM输入引脚(定时器2,第4通道)
CLK----->PB11
步进电机加减速原理
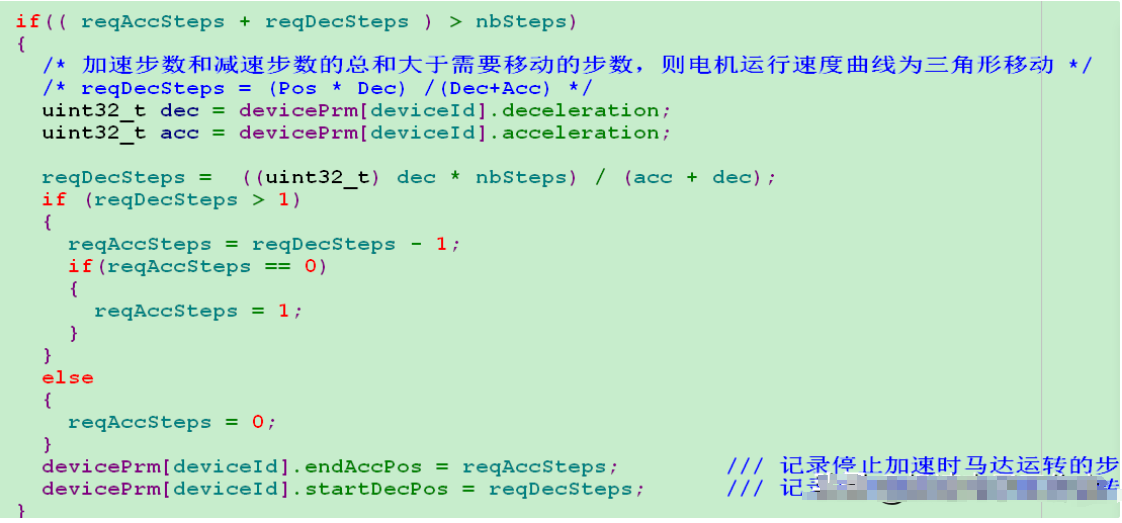
步进电机运行加减速控制,若是运行的距离不够加减速控制的步数,则该轨迹为三角形,即没有均速运行过程。
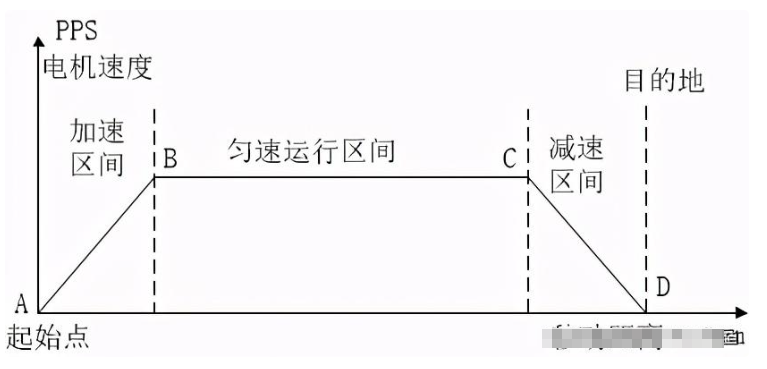
电机加减速运行轨迹
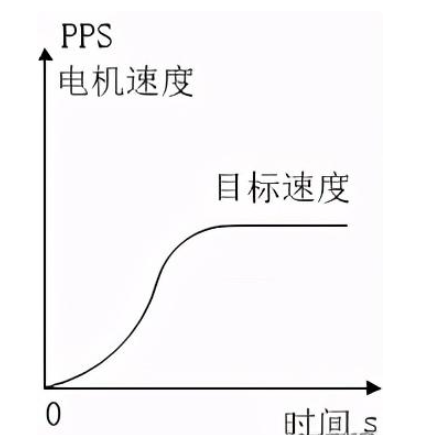
加速或减速控制曲线
根据电机加减速的曲线可以通过改变定时器的定时频率,输出不同频率的PWM脉冲波,来实现电机的加减速。
代码实现过程
cube mx软件配置基本参数,实现定时器PWM和GPIO口控制的初始化。核心部分如下
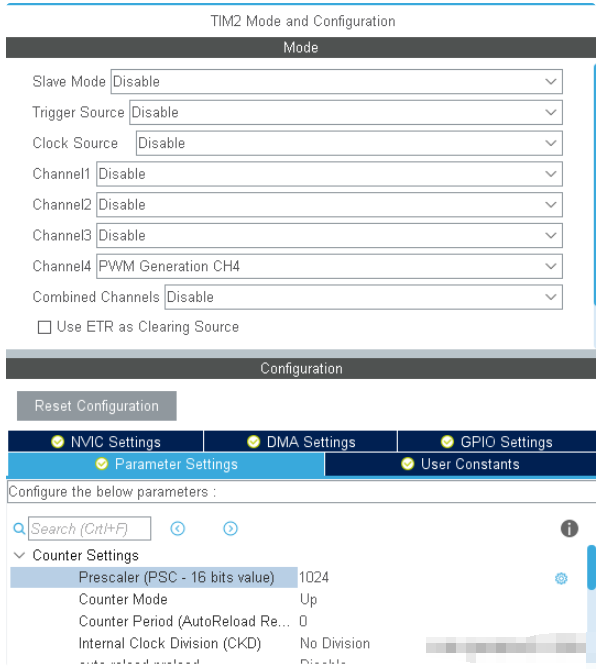
定时器2的PWM波基本参数配置
生成代码工程后,添加电机加减速控制代码,其核心代码如下
步进电机控制参数的结构体定义

电机控制参数结构体定义1
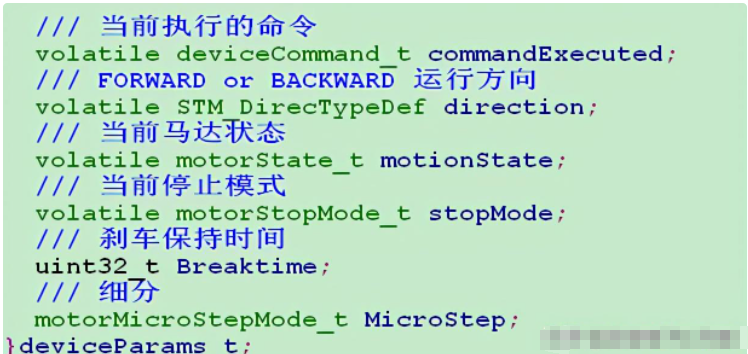
电机控制参数结构体定义2
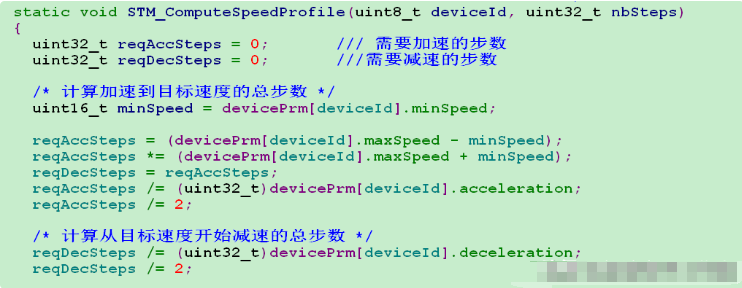
计算电机加减速参数1
计算电机加减速参数2
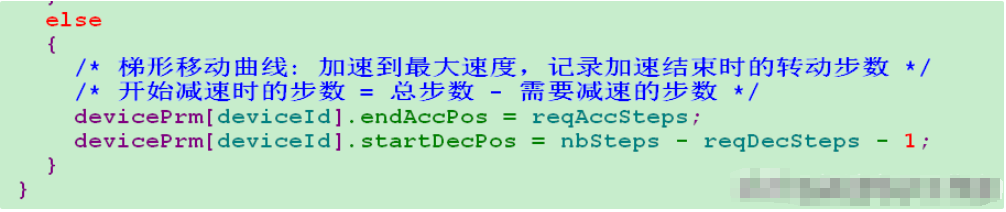
计算电机加减速参数3
然后在定时的中断回调函数中添加,电机加减速服务函数即可。

定时器中断回调函数
本次实验使用的板子
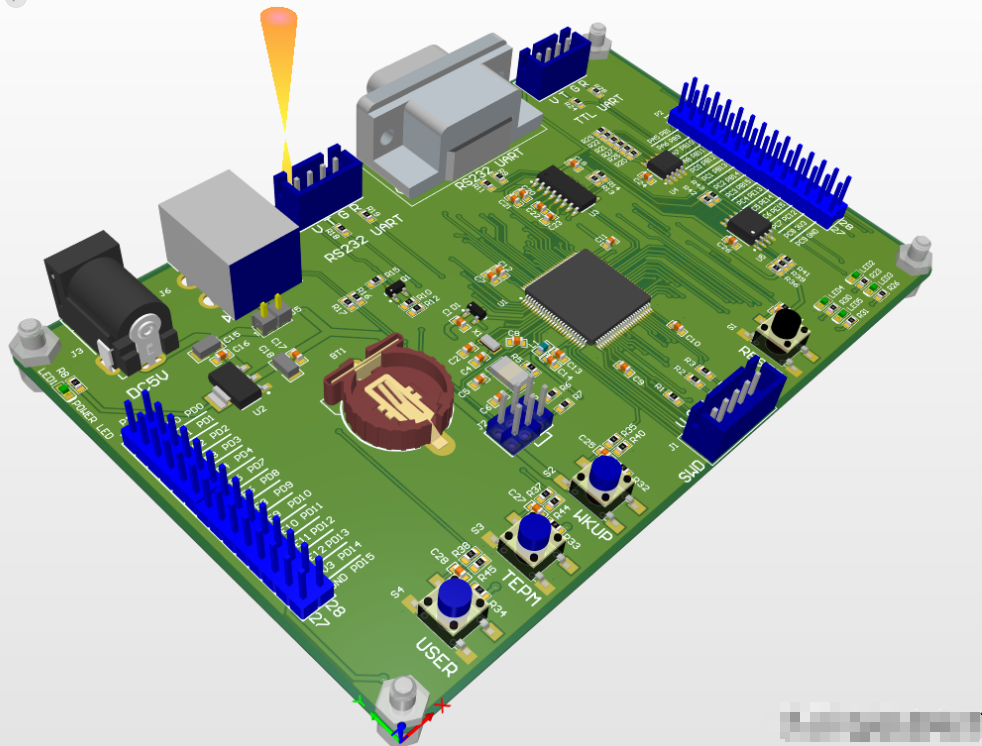
实验的主控板
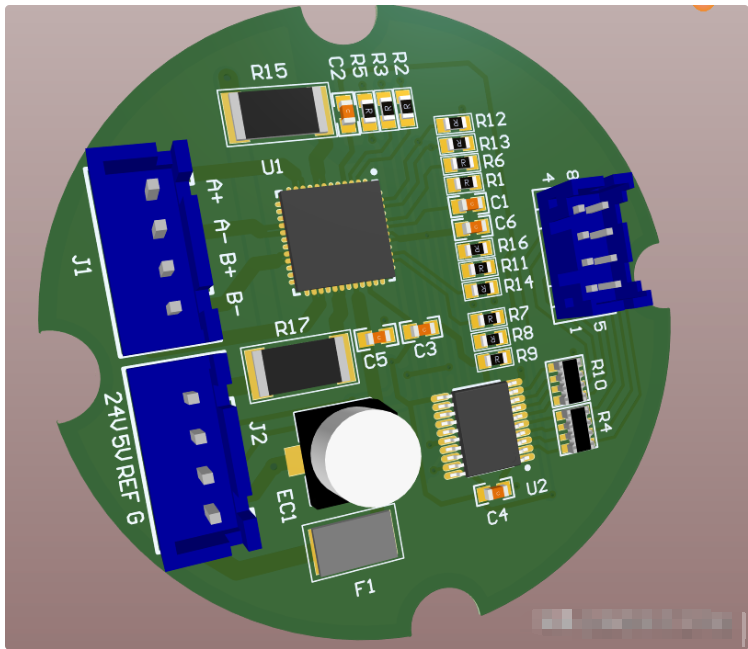
实验的电机驱动板
-
关于步进电机加减速运动的C程序编写2016-12-07 0
-
如何让步进电机平滑地加减速运动一段固定的行程?2021-07-07 0
-
F407步进电机梯形加减速算法是如何实现的?2021-07-08 0
-
怎样用STM32F103控制步进电机?2021-07-08 0
-
STM32F103定时器种类2021-08-12 0
-
STM32f103系列的定时器2021-08-18 0
-
详解STM32F103的高级定时器2021-11-24 0
-
请问如何将STM32F103的定时器1用作PWM输出呢2021-12-15 0
-
rtt系统堆栈大小影响了定时器PWM的输出如何解决呢2022-08-23 0
-
基于SOPC的步进电机加减速PWM控制器IP核设计2016-05-03 589
-
STM32F103的4轴步进电机加减速控制工程的源代码免费下载2019-10-22 980
-
STM32F103的4轴步进电机加减速控制工程源代码免费下载2019-10-22 1397
-
步进电机S型曲线加减速的实现2022-07-01 4322
-
步进电机驱动算法之梯形加减速算法2023-03-17 378
-
用STM32定时器中断产生PWM控制步进电机2023-03-23 266
全部0条评论

快来发表一下你的评论吧 !
