

浅谈外骨骼机器人的精密运动控制技术应用
机器人
描述
说到外骨骼机器人,大家可能会有些陌生,但是大家都应该听过漫威Marvel的作品Iron Man《钢铁侠》,或者看过一些科幻电影,未来的人类通过穿戴外骨骼机甲来获得巨大能量和战斗力,从而上天入地,战无不胜,外骨骼机器人赋予了大众无限遐想和向往...
通俗来讲,外骨骼机器人是一种人类可穿戴的增强设备,可以增强人类穿戴者的身体能力。通过智能控制将人类的智慧创造与机器的高强度耐久性相结合,创造出适用于多种领域的外骨骼机器人,例如用于医学康复、运动辅助或者工业搬运当中。
开发实用且性价比高的外骨骼机器人是一项令人兴奋的技术挑战。自20世纪90年代以来诸多机器人先驱者一直在积极研究这项技术,现在来跟随Celera Motion赛洛拉一起,来了解我们的精密运动控制产品是如何助力于外骨骼机器人应用。
Celera Motion - 产品应用
在外骨骼机器人的所有组件中,我们认为伺服驱动器是最重要的,如果我们比作电机是外骨骼机器人的肌肉组织,那么伺服驱动器就是机器人的大脑。因此,伺服驱动负责整套机器人的运动控制。伺服驱动通过诸多反馈传感器,接收到位置、速度或电流的指令信号。相应地调整施加到电机的电压和电流,确保外骨骼机器人整套系统的精密运动,以及高效可靠的工作。
脚踝外骨骼 - 内嵌Omni Plus电机 / Everest S伺服驱动器
Celera Motion给一家专注于外骨骼机器人的公司提供了精密运动控制解决方案,这家公司研发的外骨骼机器人,定位于帮助残障人士,让外骨骼穿戴者达到身体平衡,并且可以像正常人一样,自由行走。
这款机器人是一种具有12个自由度的自平衡外骨骼,总共装载了12个电机,依靠动态算法来确定用户的步态。它能够实现自平衡,帮助病人站立,还可以依靠动态行走算法模拟人的行走动作,并根据穿戴者的体型姿态,调整步伐和进行定制化的练习,外骨骼机器人对患者的康复训练可以起到良好的辅助作用。
这12个电机分布在机器人的三个关节处,6个位于臀部髋关节,2个位于膝盖膝关节处,4个位于脚踝关节处。在外骨骼机器人的这12个运动关节中,其中有8个轴均配备了我们的Omni Plus系列无框电机,电机外径为100mm,内径为60mm。

Omni Plus系列无框电机
在谈到为何选择这款无框电机,用户的工程师表示首先是Omni Plus系列电机的出色的功率密度和超低的齿槽力吸引了他,高功率密度是我们Omni Plus系列电机最突出的特点。另外电机具有出色的内径外径结构比例,电机大中空孔径的设计,使得用户可以更灵活的在紧凑的空间中安装我们的电机,以及完成复杂的布线。

Omni Plus系列无框电机
并且电机的热损耗小,相比其他品牌的电机,在同等的功率输出下,我们的Omni Plus电机产生的热量更少,这一点是十分重要的,因为外骨骼机器人的高安全性和稳定性的要求,人们希望外骨骼机器人能在电池供电的情况下尽可能的长时间运行,这意味着发热可能是一个问题,机器人内部的电子元器件会不可避免地发热,使得机器人本体温度会升高。根据可穿戴设备的设计要求,任何外骨骼机器人的温度都应尽可能低。这既是为了减少能量损耗,也是为了用户的舒适感和安全性。事实证明,我们的电机是介于扭矩和散热之间的最佳方案。
了解完电机,接下来我们进入到机器人的大脑,也就是伺服驱动器,在这款外骨骼机器人的所有的12个轴的运动控制,均配备了我们的最新一代伺服驱动器Everest S!
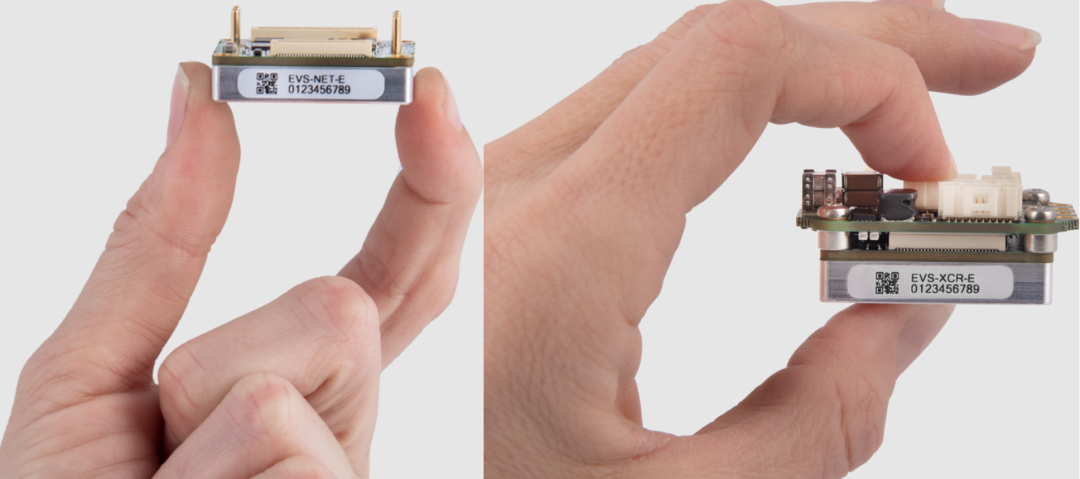
Everest S - NET / XCR
产品特点 - Everest S
持续电流45A
峰值电流60A
供电范围8VDC-80VDC
支持EtherCAT和CANopen通讯
支持PWM频率范围10 kHz ~ 100 kHz
16-bit ADC高分辨率电流采样
支持多种反馈接口编码器,并支持双绝对值编码器反馈(Endat / SSI / BISS-C)
外骨骼机器人,无论是在康复医疗应用中还是运动辅助应用中,其目的都是为了提高穿戴者的机动性,所以大多数的外骨骼机器人都配备了移动便携式电源。
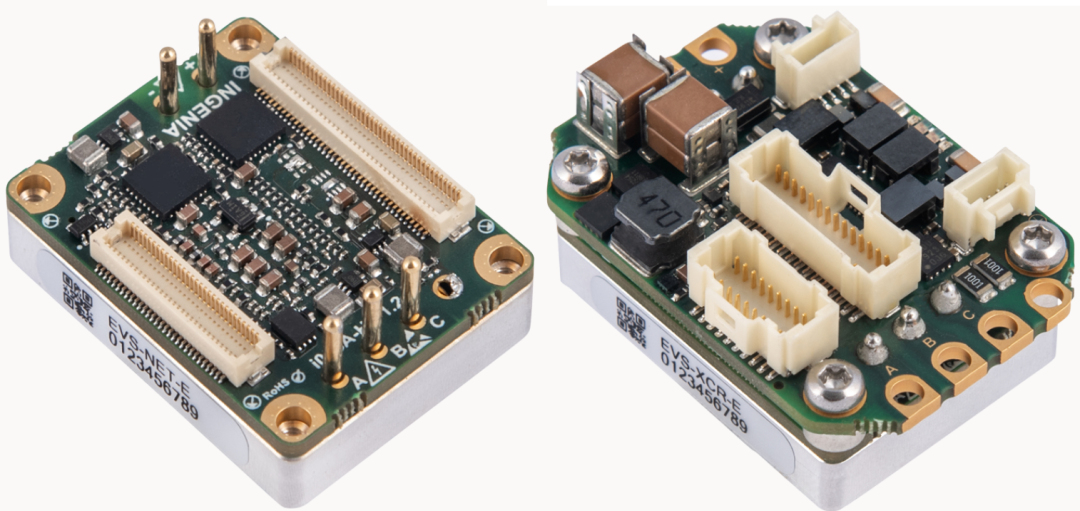
Everest S - NET / XCR
外骨骼机器人需要经常移动并尽可能长时间运行。这意味着工作效率是尤其重要的,这一特点在伺服驱动器上同样适用。使用具有低待机功耗和高工作效率的伺服驱动器对于延长外骨骼机器人的工作续航时间起到至关重要的作用。Everest S高达99%的工作效率的特性,尤其适用于外骨骼机器人这种对工作效率有严苛要求的场合。
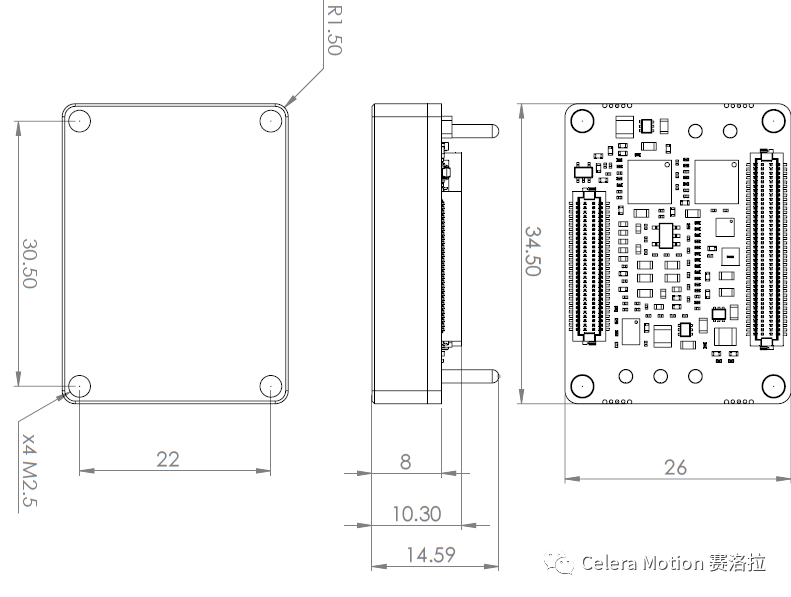
尺寸图 - Everest S (嵌入式版本)
产品轻量化,灵活化是开发外骨骼机器人的另一个重大挑战,在机器人内部紧凑的空间内安装电机、伺服驱动器和传感器绝非易事。Everest S伺服驱动器的出现,其大小仅仅只有26mm*35mm*10mm,重量最低仅为18g(嵌入式版本),意味着用户可将我们的驱动器轻松集成到紧凑且有限的安装空间内,同时我们驱动器支持定制开发,可读取多种传感器数据,例如安装在外骨骼机器人中的IMU(惯性测量单元),确保伺服驱动器实时了解当前机器人的姿态,确保安全可靠性,例如在没有安全带的保护下,外骨骼机器人也不应该在任何环境下跌倒,即使是有人去尝试推倒外骨骼机器人。
编辑:黄飞
-
「盘点」国外这些外骨骼机器人,和你想象中的一样吗?#外骨骼机器人迈步机器人 2023-10-18
-
浅析外骨骼机器人技术2019-04-28 0
-
【 平头哥CB5654语音开发板试用连载】基于外骨骼的仿生机器人控制系统2020-02-25 0
-
机器人运动控制技术2021-07-28 0
-
怎样去设计一种基于虚拟现实的运动跟踪功能的上臂外骨骼2021-09-01 0
-
机器人运动自适应智能外骨骼系统的研发2017-10-17 582
-
我国自主研发的外骨骼机器人:人体运动意图控制机器人系统2018-01-19 3398
-
外骨骼机器人的潜力如何2020-01-13 1867
-
外骨骼机器人的概述与分类2023-08-30 857
-
外骨骼机器人的发展历程与未来发展2023-08-30 676
-
「黑科技」探索外骨骼机器人的创新之旅2023-09-12 332
-
深度剖析外骨骼机器人的发展历程与技术现状2023-09-20 641
-
探索外骨骼机器人的创新之旅2023-09-20 435
-
外骨骼机器人让残障人士重获行走自由2023-09-21 771
全部0条评论

快来发表一下你的评论吧 !
