

如何使用无传感器归位来创建硬停止和改变方向
电子说
描述
如何使用无传感器归位来创建硬停止和改变方向
AlphaStep AR 系列步进电机具有传统步进电机通常不提供的扩展功能。使用 AR 上的 TLC 输出,我们可以感知预设的扭矩设置范围或执行扭矩控制功能。
该范围基于使用 MEXE02 软件或 OPX-2A 数据设置器设置的电机电流。在应用过程中,用户可以打开 T 模式输入,这将激活扭矩控制模式或推动运动。用户可以操纵 M0、M1 和 M2 输入以对应所需的电机电流设置或扭矩设置。
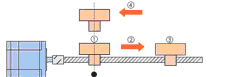
对于无传感器归位例程,我们建议将电流设置为低设置,并以慢速向硬停止移动。一旦电机达到当前设置限值,TCL 输出将激活以在达到硬停止时进行通信。然后控制器可以反转操作方向,记下位置,然后照常进行。
AR 系列步进电机还具有内置的电气复位程序。当返回输入被激活(Push-Motion 关闭)时,驱动器将自动使电机返回到 0 计数位置。这个位置实际上是第一次给驱动器通电时电机的位置。
例子
在丝杠应用中,使用 SCX10 系列控制器。
通过从 SCX10 控制器的通用输出 1 连接到 T 模式输入,以及从 SCX10 的通用输出 2 到 AR 驱动器上的 M1 输入的另一个连接,我们现在可以控制电流控制模式。来自 SCX10 的通用输入 1 需要连接到 AR 驱动器的 TLC 输出。SCX10 的无传感器归位代码类似于以下内容:
[1] OUT1 = 1(打开 T 模式)
[2] OUT2 = 1(将电流变为指定值)
[3] VS = 100(将起始速度设置为 100 Hz)
[4] VR = 500 (将运行速度设置为 500 Hz)
[5] MCN(沿 CCW 方向连续运行电机)
[6] WHILE (IN1 != 1)(连续运行直到设置输入 1)
[7] WEND
[8] MSTOP (停止电机)
[9] PC = 0(重置位置计数器)
[10] END(无传感器归位完成)
这可以很容易地由 PLC 或其他控制设备控制。
审核编辑:汤梓红
-
无位置传感器马达的原理2016-01-19 0
-
无传感器、无电刷的电动机控制设计2016-01-25 0
-
方位传感器和方向传感器的识别2018-10-29 0
-
智能传感器的应用与发展方向2018-11-07 0
-
为什么altium designer10 3D视图界面不能拖动及改变方向?2019-07-29 0
-
无刷直流电机改变方向的最佳实现方式2019-09-23 0
-
无刷直流电机(无传感器)2021-07-05 0
-
如何控制步进电机的方向2021-08-31 0
-
有霍尔传感器与无霍尔传感器详解2021-09-06 0
-
如何使用FOC来控制无传感器电机?2022-12-26 0
-
如何控制步进电机的方向?2023-03-06 0
-
通常用什么传感器来实现无接触式的高精度距离测量?2023-10-13 0
-
设计可改变方向的流水灯2009-06-28 3793
-
创建3D打印智能灯丝传感器的教程2022-07-12 1093
全部0条评论

快来发表一下你的评论吧 !
