

 小型平行履带底盘实现红外避障功能
小型平行履带底盘实现红外避障功能
电子说
1.2w人已加入
描述
1. 功能说明
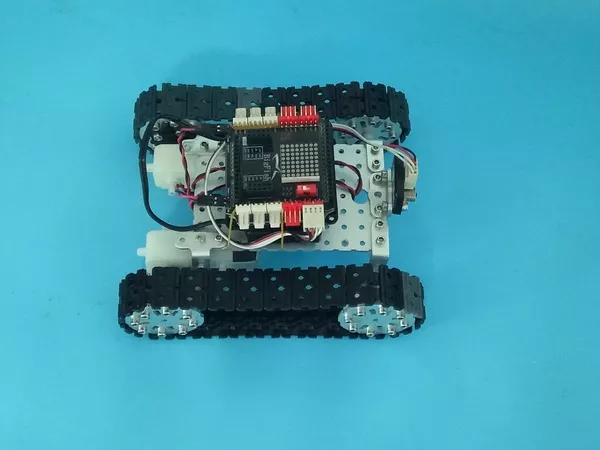
本实验使用的样机为R026a样机小型平行履带底盘。在样机前方安装1个 近红外传感器 ,如果遇到障碍,机器人后退,否则机器人前进,实现机器人避障的效果。
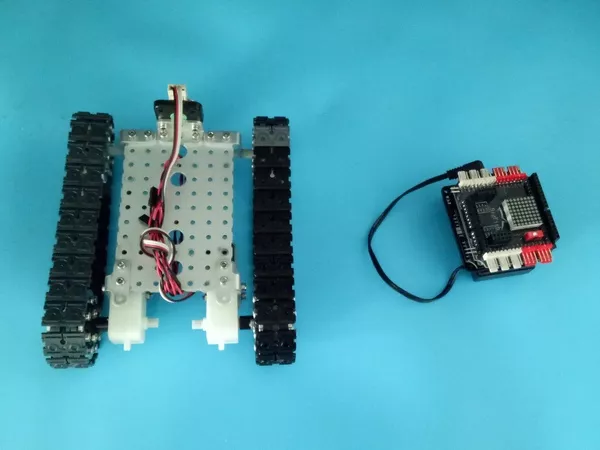
2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra(兼容Arduino Uno) |
| 扩展版 | Bigfish2.1 |
| 传感器 | 近红外传感器 |
| 电池 | 7.4V锂电池 |
两个直流电机连在D5,D6以及D9,D10接口上;近红外传感器连在A4接口上。
3. 示例程序
编程环境:Arduino 1.8.19
编写并烧录以下程序(infrared_car.ino),该程序将实现红外避障的动作【例程源代码资料下载详见 https://www.robotway.com/h-col-114.html】
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-02-10 https://www.robotway.com/
------------------------------
实验接线:两个直流电机接口的针脚号分别为D5,D6以及D9,D10;近红外传感器连在A4接口上
------------------------------------------------------------------------------------*/
void setup()
{
pinMode( 18, INPUT);
pinMode( 5 , OUTPUT);
pinMode( 6 , OUTPUT);
pinMode( 9 , OUTPUT);
pinMode( 10 , OUTPUT);
}
void loop()
{
//如果传感器遇到障碍,后退,否则前进
if (!( digitalRead(18) ))
{
digitalWrite( 5 , HIGH );
digitalWrite( 6 , LOW );
digitalWrite( 9 , HIGH );
digitalWrite( 10 , LOW );
}
else
{
digitalWrite( 5 , LOW );
digitalWrite( 6 , HIGH );
digitalWrite( 9 , LOW );
digitalWrite( 10 , HIGH );
}
}
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
红外避障小车用L298N模块2015-12-16 0
-
小车红外避障的编码2013-07-31 0
-
红外避障是数码管停止动态显示怎么解决2013-12-12 0
-
请问循迹避障当中的四路循迹模块与红外寻光&避障模块有什么区别?2019-02-01 0
-
请问怎么实现智能小车红外避障的掉头?2019-04-28 0
-
stm32基础项目——智能小车(红外避障)精选资料分享2021-08-11 0
-
如何使用STC89C53单片机实现带全向轮的两轮驱动避障小车的设计?2021-10-12 0
-
请问STM32如何使用红外避障传感器?2021-11-25 0
-
怎样去设计基于单片机的红外避障循迹小车2021-11-26 0
-
如何实现四路红外传感器避障小车的设计?2021-12-20 0
-
基于51单片机红外避障循迹模块的代码程序该怎样去实现呢2022-03-01 0
-
小型双节履带底盘的制作2023-01-07 637
-
小型平行履带底盘的制作分享2023-01-12 2792
-
小型平行履带底盘实现超声避障功能2023-03-09 302
-
小型平行履带底盘实现双灰度循迹功能2023-03-09 283
全部0条评论

快来发表一下你的评论吧 !
