

用Arduino自制一个只有表针的时钟
描述
我们来一起看看如何用Arduino自制一个只有表针,没有表盘的“空心时钟”。
看起来还是挺炫酷的,再放几张网友们参照教程做的图欣赏一下:
第0步:材料准备
步进电机28BYJ-48和驱动板包括
用于控制步进电机的微控制器(比如Arduino nano)
2mm x 10mm自攻螺钉 * 8
润滑脂(高粘性)
这个时钟可以用大多数常见的200 x 200mm打印机打印,除了装饰部分(index.stl,203 x 203mm)。
文章最后还有一个缩小小的版本(85%)。
第1步:打印零件
打印零件
有些零件需要支撑
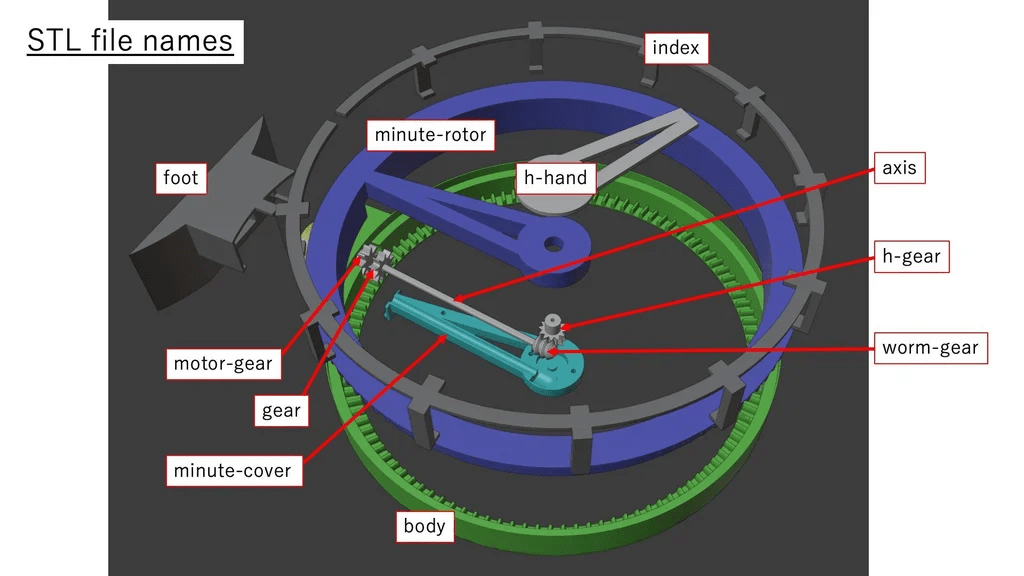
好好去毛刺,特别是几个非常小的齿轮(时钟中心的蜗轮和小齿轮)
第2步:组装蜗杆传动系统
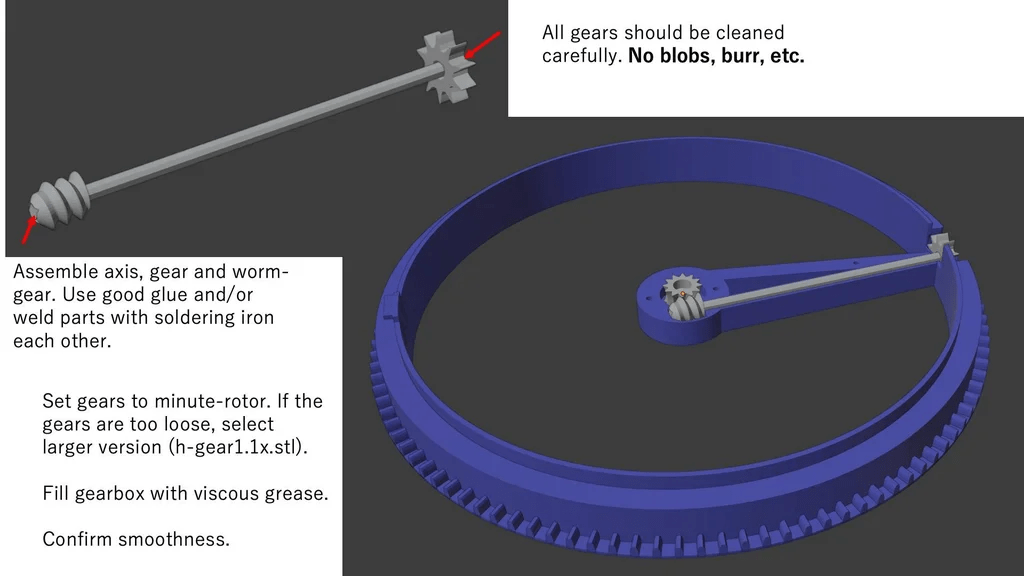
用烙铁进行塑料焊接,对于连接gear.stl、axis.stl和worm-gear.stl相互之间是很有用的。
你也可以使用一些安全的胶水,如双组分环氧胶。
在中央齿轮中注入一点油脂。不仅可以减少摩擦,而且可以减少齿隙。
中央齿轮的齿隙对时钟的精确性影响很大。h-gear1.1x.stl比原来的h-gear.stl要大一点,以抑制齿隙。中央齿轮的齿隙对时钟的精确性影响很大。从两个候选中选择更好的小齿轮。h-gear1.1x.stl比原来的h-gear.stl大一点。
第3步:组装电机驱动器
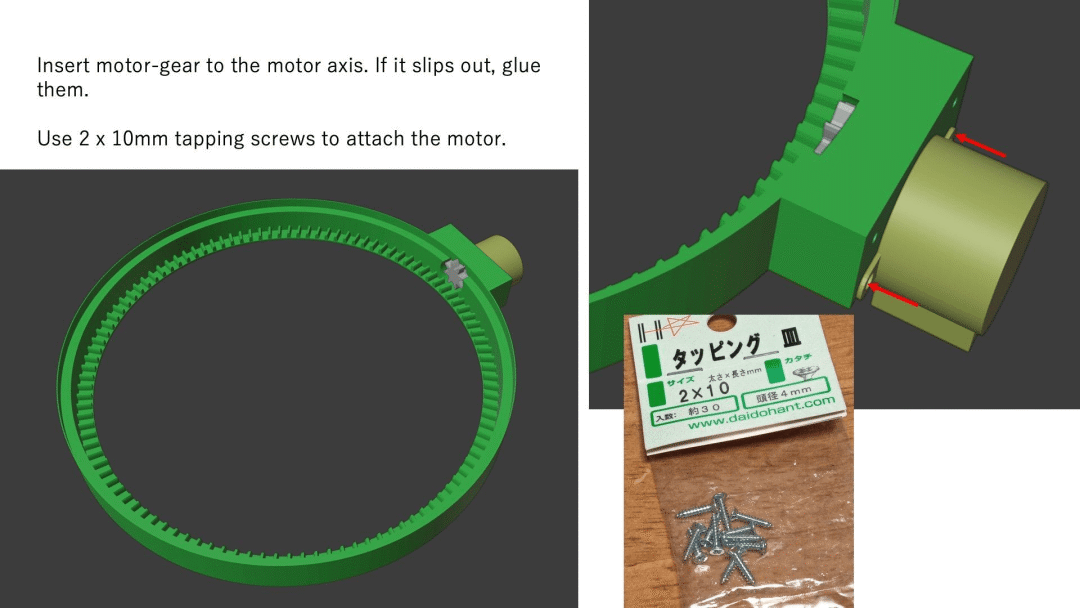
如果2毫米自攻螺钉的头部比步进电机的孔小,请使用垫圈或换更大的螺钉。
第4步:啮合分钟旋转器和时钟的主体
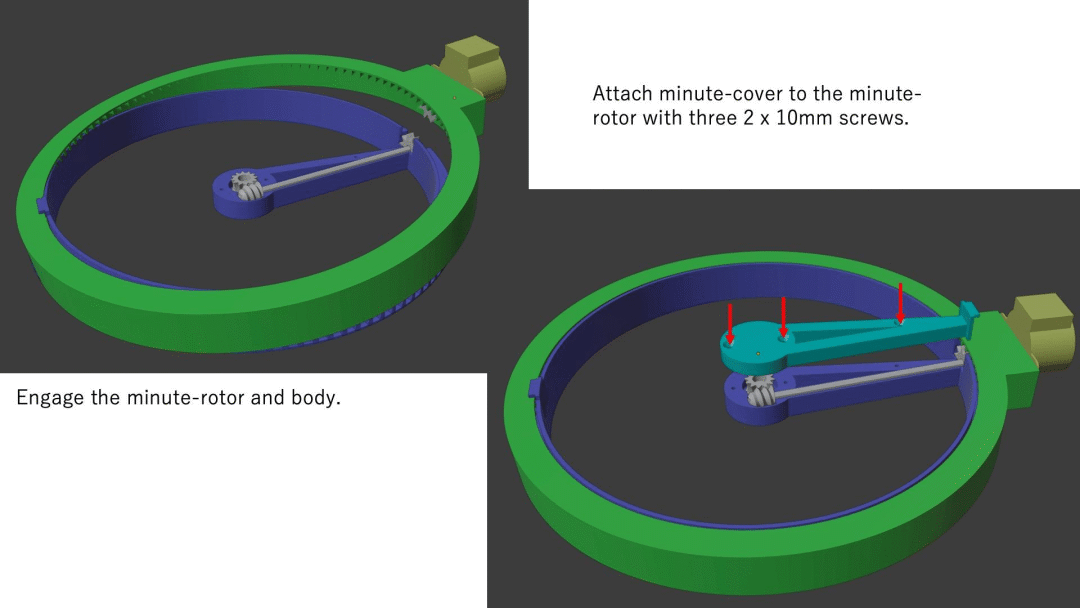
为了避免齿轮脱落,我们可以翻转机身一侧(上图中的绿色部分),然后把顶部的钩子钩住。
需要使用三颗自攻螺钉安装分钟盖。
第5步:安装时针
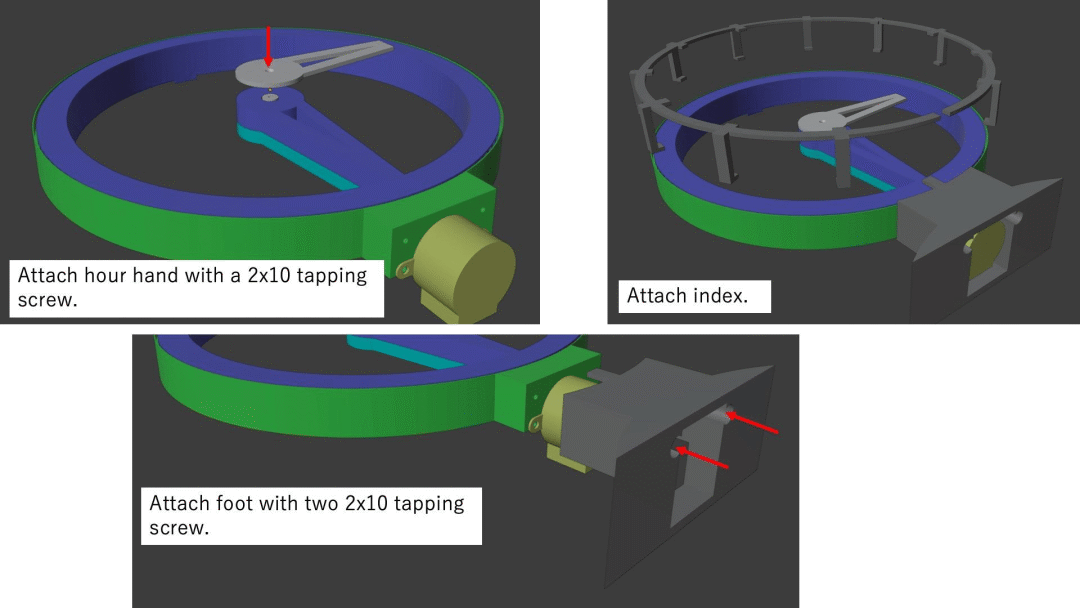
注意使用自攻螺丝安装时针的时候不要拧太紧了,当你调整时钟时,它应该是会滑动的
固定好其他部分
第6步:准备电路
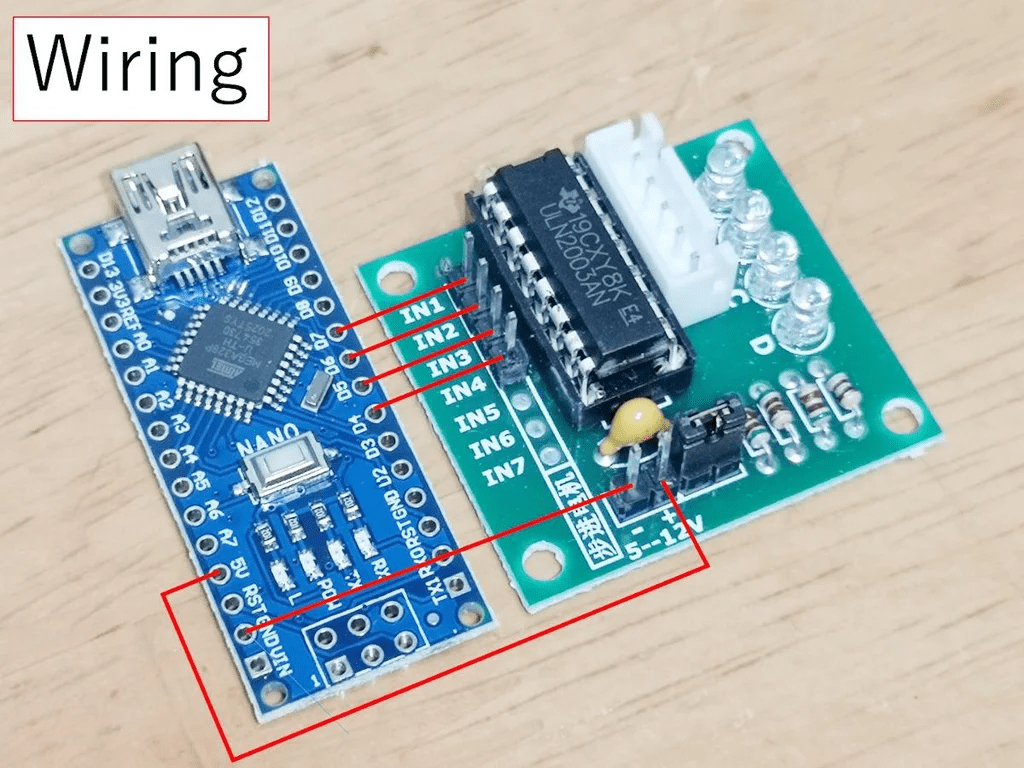
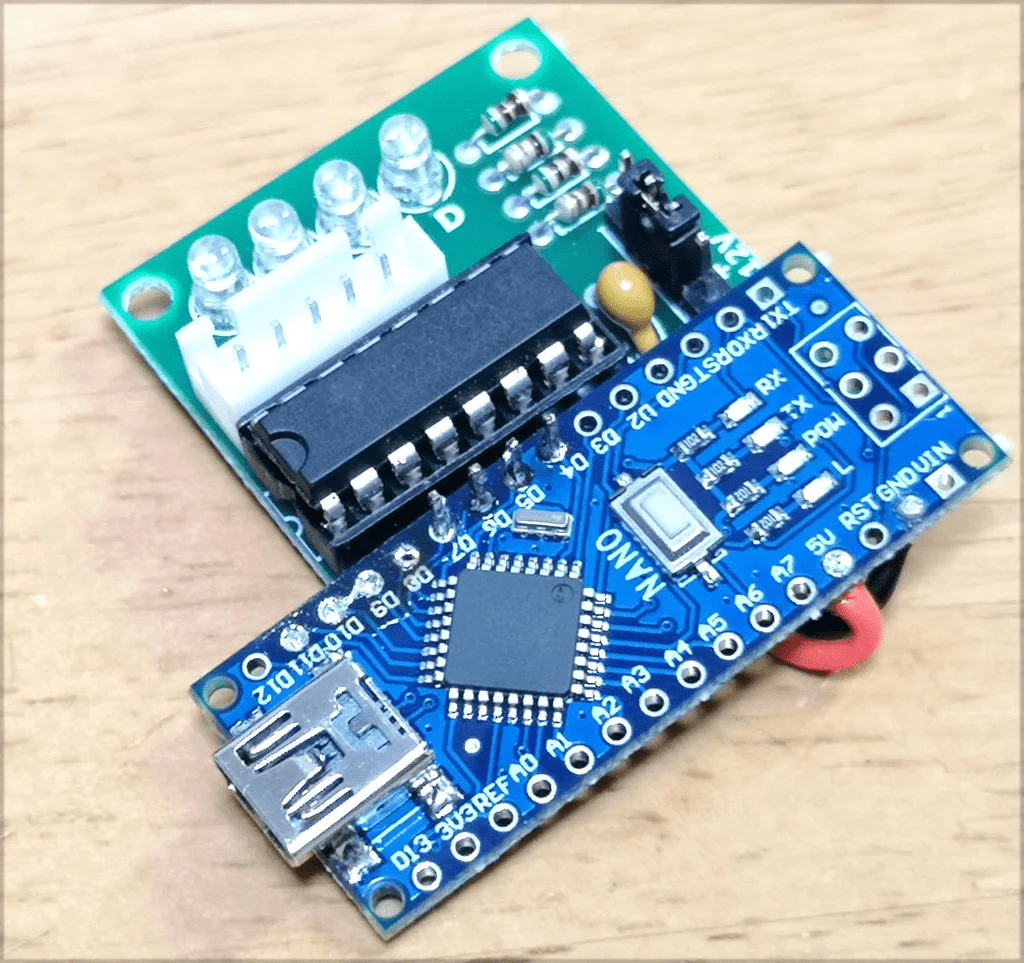
将Nano的端口4、5、6和7连接到步进电机驱动器
连接VCC(+5V)和GND
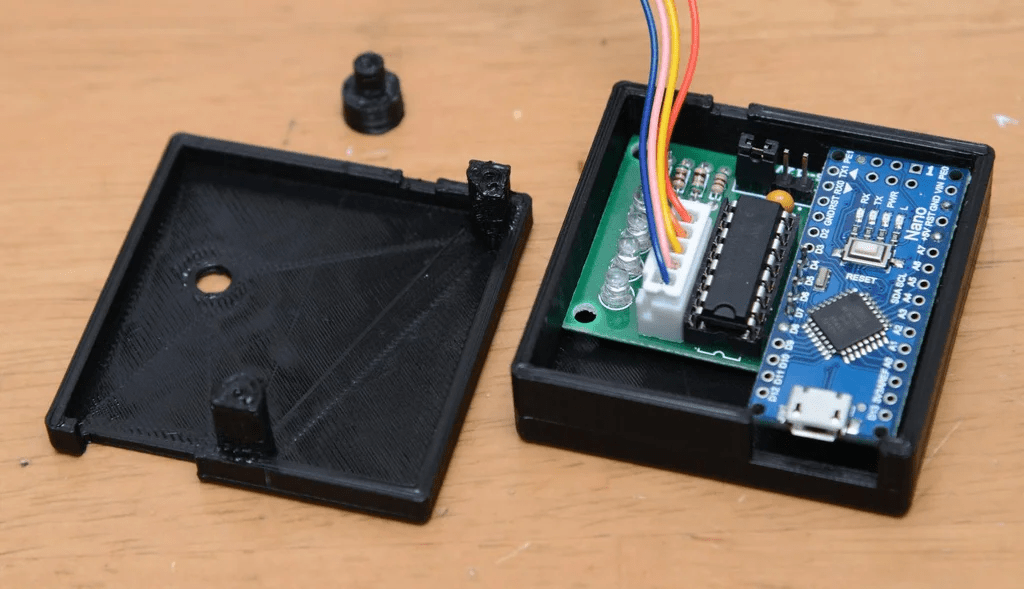
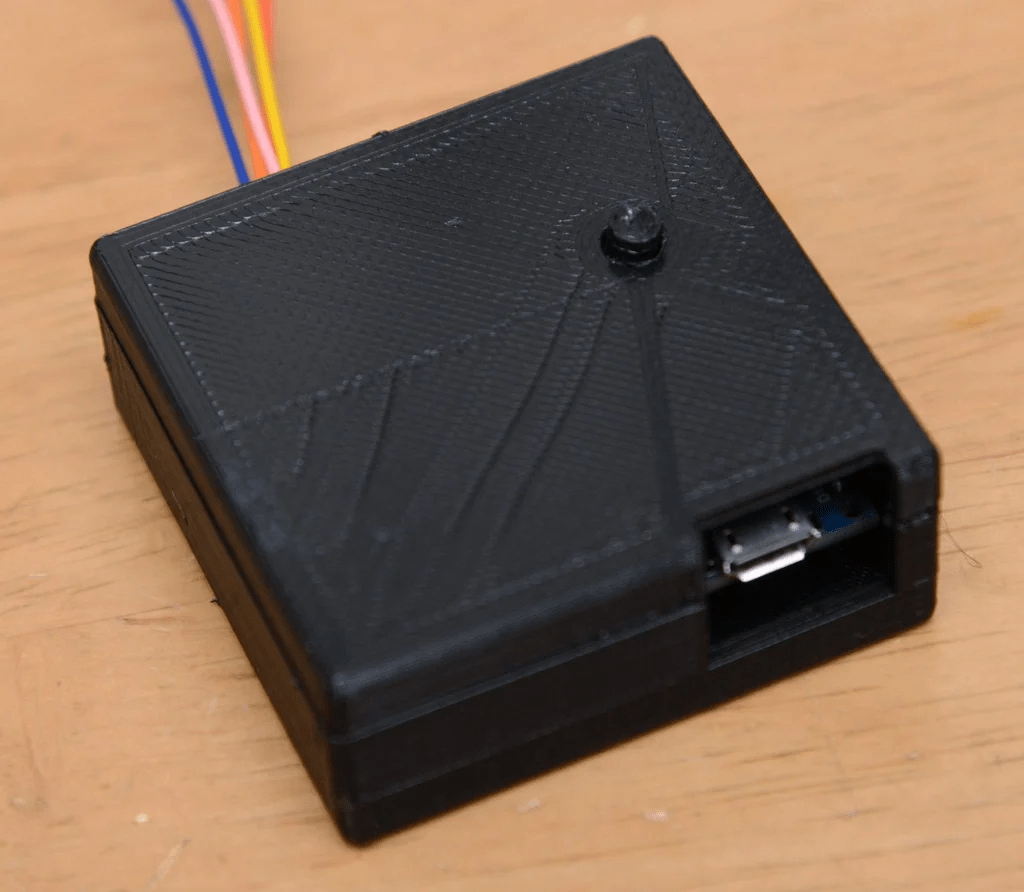
如果你想把整个电路封闭起来放到盒子里,可以打印零件做个盒子(相关文件放在文末)。
然后用两个2毫米的自攻螺钉来组装起来。
第7步:程序
将代码闪到Arduino上。把代码上传到Arduino IDE 上。
如果你的电机跑错了方向,请修改代码中的数字顺序:
int port[4] = {4, 5, 6, 7};
改为:
int port[4] = {7, 6, 5, 4};
这上面的数字和Arduino Nano的针脚有关(D4-D7)。
完整代码如下:
// Please tune the following value if the clock gains or loses.
// Theoretically, standard of this value is 60000.
#define MILLIS_PER_MIN 60000 // milliseconds per a minute
// Motor and clock parameters
// 4096 * 110 / 8 = 56320
#define STEPS_PER_ROTATION 56320 // steps for a full turn of minute rotor
// wait for a single step of stepper
int delaytime = 2;
// ports used to control the stepper motor
// if your motor rotate to the opposite direction,
// change the order as {4, 5, 6, 7};
int port[4] = {4, 5, 6, 7};
// sequence of stepper motor control
int seq[8][4] = {
{ LOW, HIGH, HIGH, LOW},
{ LOW, LOW, HIGH, LOW},
{ LOW, LOW, HIGH, HIGH},
{ LOW, LOW, LOW, HIGH},
{ HIGH, LOW, LOW, HIGH},
{ HIGH, LOW, LOW, LOW},
{ HIGH, HIGH, LOW, LOW},
{ LOW, HIGH, LOW, LOW}
};
void rotate(int step) {
static int phase = 0;
int i, j;
int delta = (step > 0) ? 1 : 7;
int dt = 20;
step = (step > 0) ? step : -step;
for(j = 0; j < step; j++) {
phase = (phase + delta) % 8;
for(i = 0; i < 4; i++) {
digitalWrite(port[i], seq[phase][i]);
}
delay(dt);
if(dt > delaytime) dt--;
}
// power cut
for(i = 0; i < 4; i++) {
digitalWrite(port[i], LOW);
}
}
void setup() {
pinMode(port[0], OUTPUT);
pinMode(port[1], OUTPUT);
pinMode(port[2], OUTPUT);
pinMode(port[3], OUTPUT);
rotate(-20); // for approach run
rotate(20); // approach run without heavy load
rotate(STEPS_PER_ROTATION / 60);
}
void loop() {
static long prev_min = 0, prev_pos = 0;
long min;
static long pos;
min = millis() / MILLIS_PER_MIN;
if(prev_min == min) {
return;
}
prev_min = min;
pos = (STEPS_PER_ROTATION * min) / 60;
rotate(-20); // for approach run
rotate(20); // approach run without heavy load
rotate(pos - prev_pos);
prev_pos = pos;
}
第8步:测试和调整
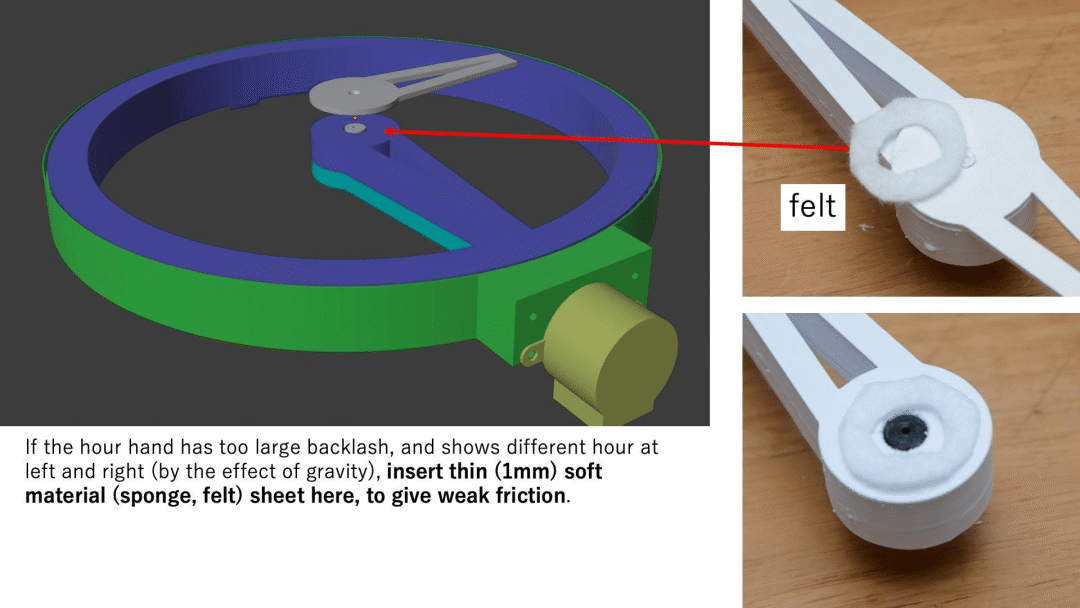
由于齿轮组有一定的齿隙,因此时针的位置会在左右两边出现偏差。为了解决这个问题,可以在那里插入一些柔软的材料,比如毛毡或海绵,来提供一点摩擦。
在指针上涂上油漆可以提高能见度。颜料型涂料比染料型油墨好,后者会有毛细扩散现象。
第9步:调整时间
用Nano的复位按钮把时间设置提前一分钟
在电机旋转时,再用复位按钮进行精调
时针可以直接用手调整(靠摩擦)
作者: shiura
审核编辑:汤梓红
-
【自制】Arduino:oled0-96实时时钟显示(mini桌面时钟part12新创司XLOT 2022-03-01
-
【自制】Arduino数码时钟模块新创司XLOT 2022-03-01
-
用arduino自制鼠标2013-10-07 0
-
自制单片机时钟2014-03-19 0
-
用Arduino自制一颗跳动的心!!2015-09-28 0
-
自制时钟机械运动+数字显示2017-05-08 0
-
请问自制的arduino控制板不能直接用Arduino IDE烧录程序怎么办?2018-12-03 0
-
自制一个ARDUINO PRO迷你版2022-06-21 0
-
自制一个Arduino Pcb2022-07-21 0
-
基于Arduino自制遥控气垫船2022-08-03 0
-
自制一个arduino项目2022-08-15 0
-
用a4纸自制一款手势鼠标项目2023-10-10 0
-
使用Arduino的7段时钟2022-10-19 283
-
使用Arduino优化自制电力的电源路由器2022-11-08 250
-
基于arduino的自制呼吸机2022-11-16 652
全部0条评论

快来发表一下你的评论吧 !
