

ROS移动机器人中常用的两种电机
描述
电机在整个ROS机器人系统中担任“执行机构”的角色,机器人的动力来源于电机。 在电机参数范围内,可以根据控制需求要求电机提供所需角速度和所需要的扭矩,电机都能够在较短的时间内完成响应。 ROS移动机器人中常常会使用的如下两种电机:
直流有刷电机:有刷电机中线圈的电流方向变换通过碳刷与换向器完成。 如下图所示,电机由机座、磁极、换向器、端盖、轴承和碳刷等构成。
直流有刷电机控制电路简单,在只需要控制电机旋转方向的场景下,通过两个继电器便可以实现电机控制。 在ROS移动机器人的应用场景下对电机的控制不仅仅有旋转方向的控制需求,而且还有电机转速的控制需求,所以在这种应用场景中 常常使用功率开关管(MOS,IGBT)搭建H桥电路进行电机方向与转速的控制。 电路设计将在下篇文章进行介绍。
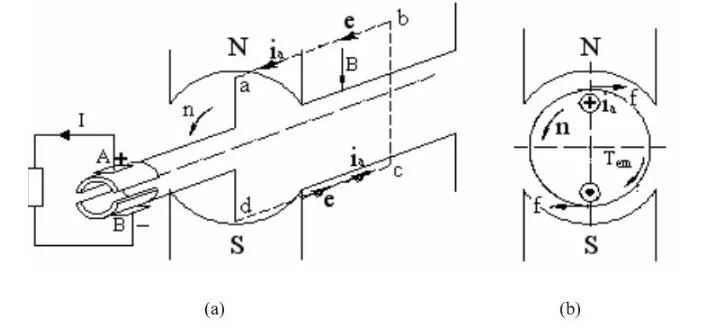
直流无刷电机:顾名思义直流无刷电机,在电机结构中取消了直流有刷电机中的碳刷。 此时电机绕组作为电机的定子,永磁体作为电机的转子,与直流有刷电机结构恰恰相反。 直流有刷电机结构如下图所示。
直流无刷电机具有转速高,运行平稳,无打火,无灰尘等优点。 常常应用在对控制要求比较高,转速较高的设备上,比如无人机,医疗设备,扫地机器中都可以看见无刷直流电机的身影。
与直流有刷电机相比无刷电机的优点众多,但为了能够发挥出无刷电机的众多优势。 需要复杂的控制电路(如:逆变电路,半桥驱动电路,检流电路,编码器接口,通信接口电路,电源电路等等),同时还需要配合电机控制算法(如方波控制算法,V/F控制算法,FOC控制算法等等)才能发挥出无刷电机的优势。
下面我们来看看电机中几个比较重要的定则,顺便也复习下高中物理知识。
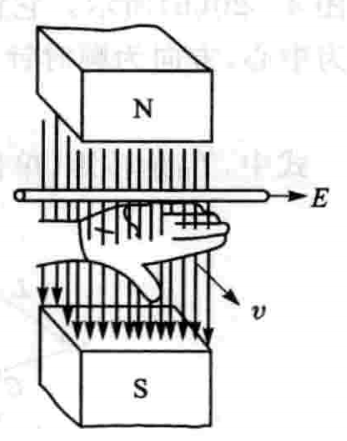
左手定则:位于磁场中的载流导体,会受到力的作用,力的方向可按照左手进行确定。 如下图所示:
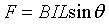
在电机中一个线圈有两个有效线圈AB,CD。 它们在磁场中受力大小相等,方向相反,所以对中心轴的转矩可通过下面的式子进行计算:

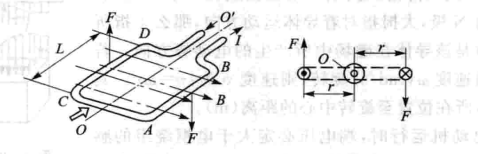
一般电机都会绕有n个线圈,所以线圈对中心轴的总转矩可以这样计算

当一个电机生产完成后,电机绕组圈数n,磁感应强度B以及线圈半径r和有效长度L都是固定参数在这里可以当做一个常数K。

所以电机转矩可以简化为下式:

所以电机转矩可以通过控制电流进行精确控制。
右手定则 : 导体在磁场中做切割磁力线运动时会在导体中产生感应电动势E,其方向可以通过右手定则进行确定,如下图所示。
计算公式为:
在电机中一般以角速度表示电机的转速,并且电机有n个线圈。 所以电机在旋转时的反电动势可根据下式进行计算:

当电机确定后,绕组圈数n,线圈半径r,磁感应强度B,导体有效长度L都为定值,可用常数Z进行表示。 这时电机反电动势可由下式进行计算:

由上式可知当电机参数确定后,反电动势由电机旋转速度确定。
右手螺旋定则 : 用右手握住通电螺线管,让四指指向导线中电流方向,那么大拇指指向就是通电螺线管中磁场方向。 这个定则在电机中主要用来确定电机线圈磁场方向。
-
移动机器人常用传感器2012-08-20 0
-
Labview My RIO 移动机器人2016-08-21 0
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 0
-
如何实现移动机器人的设计?2020-11-23 0
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 0
-
什么是移动机器人软硬件系统问题2021-08-06 0
-
最实用的STM32和ROS机器人的串口通信方案2021-08-20 0
-
差速移动机器人轨迹跟踪控制方法2021-09-01 0
-
移动机器人的三种主要运动系统2021-09-01 0
-
一般机器人驱动机构中电机的选择问题2021-09-01 0
-
如何利用扫地机轮子制作ROS移动机器人地盘2022-01-14 0
-
电机在ROS移动机器人系统中的作用2023-03-17 0
-
PLC技术在移动机器人中的应用研究2021-05-06 648
-
制作ROS移动机器人地盘2022-01-14 357
-
ROS移动机器人中常用的编码器2023-03-17 1203
全部0条评论

快来发表一下你的评论吧 !
