

CPU设计之Cache存储器
电子说
描述
什么是cache
Cache存储器也被称为高速缓冲存储器,位于CPU和主存储器之间。之所以在CPU和主存之间要加cache是因为现代的CPU频率大大提高,内存的发展已经跟不上CPU访存的速度。在2001 – 2005年间,处理器时钟频率以每年55%的速度增长,而主存的增长速度只是7%。在现在的系统中,处理器需要上百个时钟周期才能从主存中取到数据。如果没有cache,处理器在等待数据的大部分时间内将会停滞不动。
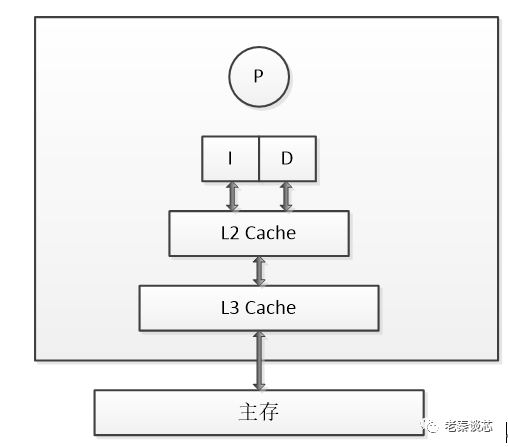
图1 现代处理器存储层次示意图
Cache的基本原理
Cache的容量跟主存比起来要小得多,尤其是离CPU最近的L1,通常是几十KB大小。一般L3也就是几十MB大小,跟现在以GB为单位的内存比起来差了好几个数量级。那为什么加入cache还能提高性能呢?
设想一下,如果提前把CPU接下来最有可能用到的数据存放在cache中,那么CPU就可以在很短的时间内得到数据了,一般如果L1命中的话,CPU在2-3个时钟周期内就会得到想要的数据。那么CPU是如何预测到接下来将要用到的数据的呢?其实这种预测是基于程序代码和数据在时间和空间上的局部性原理(locality)。
- 时间局部性(temporal locality):如果一个数据现在被访问了,那么以后很有可能也会被访问。
- 空间局部性(spatial locally):如果一个数据现在被访问了,那么它周围的数据在以后可能也会被访问。
这里要提到一些概念。当CPU在cache中找到需要的数据,我们称之为命中(hit)。反之没有找到数据,我们称之为缺失(miss),这时候就要去外层存储中寻找所需数据。如果是多级cache设计,那么对于L1来讲L2就是它的外层存储。
缓存缺失的类型有很多,常见的有以下三种,可以用3C表示
- 强制缺失(Compulsory miss),第一次将数据块读入cache所产生的缺失,也成为冷缺失(cold miss)。
- 冲突缺失(Conflict miss),由于cache相联度有限导致的缺失。
- 容量缺失(Capacity miss),由于cache大小有限导致的缺失。
高速缓存的管理需要考虑多个方面。首先是数据放置策略;其次是数据替换策略;最后是数据写策略,后面会逐一介绍。
为什么cache要分级
我们经常会看到cache分为L1,L2,L3甚至L4等多级。为什么不能把L1的容量做大,不要其它的cache了?原因在于性能/功耗/面积(PPA)权衡考虑。L1 cache一般工作在CPU的时钟频率,要求的就是够快,可以在2-4时钟周期内取到数据。L2 cache相对来说是为提供更大的容量而优化的。虽然L1和L2往往都是SRAM,但构成存储单元的晶体管并不一样。L1是为了更快的速度访问而优化过的,它用了更多/更复杂/更大的晶体管,从而更加昂贵和更加耗电;L2相对来说是为提供更大的容量优化的,用了更少/更简单的晶体管,从而相对便宜和省电。在有一些CPU设计中,会用DRAM实现大容量的L3 cache(一个DRAM的存储单元要比SRAM小)。现在也有一些设计会带L4 cache,有时放在片外或者和CPU封装在一起。
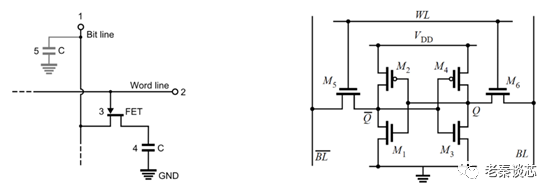
图2 DRAM(左)和SRAM(右)基本单元结构图
再回到L1 cache,如果容量做大,那么存储单元的选通将会复杂。从而很难满足高时钟频率的要求。另外,当cache容量很小时增加容量,命中率增加的比较明显;当容量达到一定程度,提高cache容量对于提高cache命中率的贡献就很有限了。简单说就是大容量L1很难做,即使做出来用处不明显。与其这样,还不如把节约下来的晶体管用来做其它的用途。
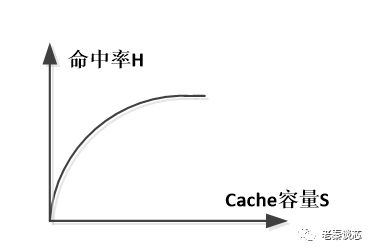
图3 Cache命中率与容量关系
因此出于PPA的权衡,我们先看到的cache系统一般是这样的:32-64KB的指令cache和数据cache(一般L1的指令和数据cache是分开的),2-4个时钟周期访问时间;256KB-2MB的L2 cache(一般从L2开始指令和数据就不分开了),10-20个时钟周期的访问时间;8-80MB的L3 cache,20-50个时钟周期的访问时间。注意,这里所说的时钟周期都是指的CPU的时钟周期。一般L2和L3的工作时钟频率要比CPU的低,这个时钟周期是折算后的数值。
Cache的数据放置策略
在讲cache的构成前,先要讲几个概念。首先,缓存的大小称之为cache size,其中每一个缓存行称之为cache line。Cache主要由两部分组成,Tag部分和Data部分。因为cache是利用了程序中的相关性,一个被访问的数据,它本身和它周围的数据在最近都有可能被访问,因此Data部分就是用来保存一片连续地址的数据,而Tag部分则是存储着这片连续地址的公共地址,一个Tag和它对应的所有数据Data组成一行称为cache line,而cache line中的数据部分成为数据块(cache data block,也称做cache block或data block)。如果一个数据可以存储在cache的多个地方,这些被同一个地址找到的多个cache line称为cache set。当CPU在读取缓存数据时,一个cache line的多字节会被同时读出。
假设我们现在的cache size是32KB,一个cache line是64Bytes。通过简单的除法我们就知道在cache中有512条cache line。假设我们的系统中地址宽度是32bit,当一个地址发下来,会用最低的6bits作为块内的偏移地址(offset),用较高的9bits作为cache索引地址(index),将其余的17bits地址作为标志位(tag)作为比对。
使用Index来从cache中找到一个对应的cache line,但是所有Index相同的地址都会寻址到这个cache line,因此在cache line中还有Tag部分,用来和地址中的Tag进行比较,只有它们相等才表明这个cache line就是想要的那个。在一个cache line中有很多数据,通过存储器地址中的Offset部分可以找到真正想要的数据,它可以定位到每个字节。在cache line中还有一个有效位(Valid),用来标记这个Cache line是否保存着有效的数据,只有在之前被访问过的存储器地址,它的数据才会存在于对应的cache line中,相应的有效位也会被置为1。每个cache line中会有一个bit位记录数据是否被修改过,称之为dirty bit。
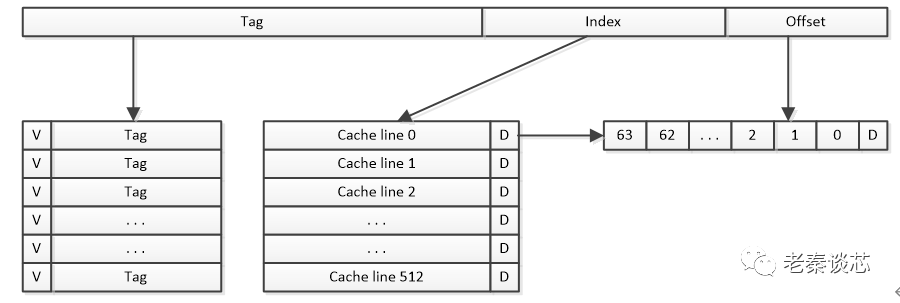
图1 cache组成结构示意图
上面的地址对应关系被称为直接映射(direct-mapped)。直接映射缓存在硬件设计上会更加简单,因此成本上也会较低。根据直接映射,我们可以画出主存地址与cache的对应关系如下图:
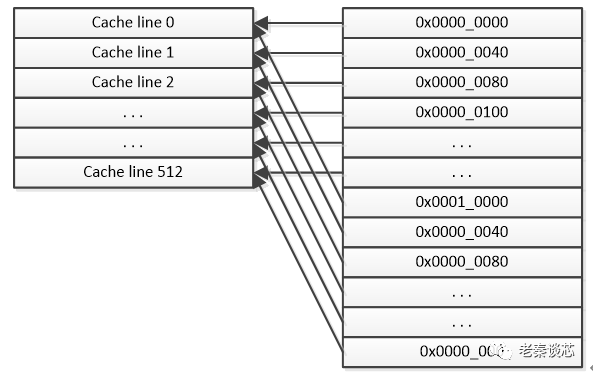
图2 直接映射的内存与cache对应关系
问题来了,如果CPU需要连续访问0x0000_0000,0x0001_0000,0x0002_0000地址,会发生什么呢?这三个地址的index位是一样的,tag位不同,因此对应的cache line是同一个。所以当访问0x0000_0000时,cache缺失,需要从主存中搬入数据(假设只有一级cache);当访问0x0001_0000时,同样是cache缺失,需要从主存中搬入数据,替换掉cache中的上一条数据;当访问0x0002_0000时,依然cache缺失,需要从主存中搬入数据。这就相当于每次访问数据都要从主存中读取,所以cache的存在并没有对性能有什么提升。这种现象叫做cache颠簸(cache thrashing)。
组相联的方式是为了解决直接映射结构Cache的不足而提出的,存储器中的一个数据不单单只能放在一个cache line中,而是可以放在多个cache line中,对于一个组相联结构的cache来说,如果一个数据可以放在n个位置,则称这个cache是n路组相联的cache(n way set-associative Cache)。下图为一个两路组相联Cache的原理图。
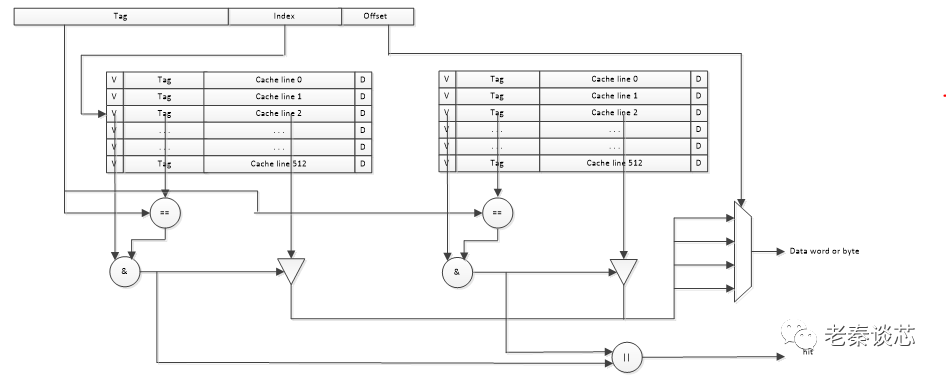
图3 两路组相联cache
这种结构仍旧使用存储器地址的Index部分对cache进行寻址,此时可以得到两个cache line,这两个cache line称为一个cache set,究竟哪个cache line才是最终需要的,是根据Tag比较的结果来确定的,如果两个cache line的Tag比较结果都不相等,那么就说明这个存储器地址对应的数据不在cache中,也就是发生了cache缺失。上图所示为并行访问,如果先访问Tag SRAM部分,根据Tag比较的结果再去访问Data SRAM部分,就称为串行访问。
两路组相联缓存的硬件成本相对于直接映射缓存更高。因为其每次比较tag的时候需要比较多个cache line对应的tag(某些硬件可能还会做并行比较,增加比较速度,这就增加了硬件设计复杂度)。为什么我们还需要两路组相联缓存呢?因为其可以有助于降低cache颠簸可能性。
既然组相联缓存那么好,如果所有的cache line都在一个组内。岂不是性能更好?由于所有的cache line都在一个组内,因此地址中不需要set index部分。因为,只有一个组让你选择,间接来说就是你没得选。我们根据地址中的tag部分和所有的cache line对应的tag进行比较(硬件上可能并行比较也可能串行比较)。哪个tag比较相等,就意味着命中某个cache line。因此,在全相连缓存中,任意地址的数据可以缓存在任意的cache line中。所以,这可以最大程度的降低cache颠簸的频率。但是硬件成本上也是更高。
Cache的写策略
第一个写策略问题是,当处理器修改了高速缓存中的数据后,这些修改什么时候会被传播到外层的存储层次。对于D-cache来说,当执行一条store指令时,如果只是向D-Cache中写入数据,而并不改变它的下级存储器中的数据,这样就会导致D-cache和下级存储器中,对于这一个地址有着不同的数据,这称作不一致(non-consistent)。对应的两种策略是:
- 写直达(write through),缓存中任何一个字节的修改都会被立即传播到外层的存储层次。
- 写回(write back),只有当缓存块被替换的时候,被修改的数据块会写回并覆盖外层存储层次中的过时数据。
采用写直达还是写回策略,首先要考虑的系统带宽。对于处理器芯片最外层的高速缓存,由于片外带宽有限,往往采用写回策略;而对于内层高速缓存,由于片上带宽较大,因此往往采用写直达策略。
一个影响是要考虑两种策略在硬件故障下的容错。例如,当遇到阿尔法粒子或者宇宙射线时存储在高速缓存中的数据会反转其存储的值。在写直达策略中,当检测到故障时,可以安全的丢弃出故障的数据块并从外层存储中重新读取该数据块。但在写回策略中,仅仅有故障检测并不够。为了增加纠错功能,需要添加冗余的数据位ECC。但由于ECC计算开销大,因此ECC会增加高速缓存的访问时延。
另一个影响是要考虑两种策略中外层高速存储的功耗。在写直达策略中,外层高速缓存会被频繁写入,导致外层高速缓存较高的功耗。解决办法之一是在内层缓存和外层缓存中间增加一个写缓冲,用于临时保存对内层缓存的最近若干更新。当写缓冲满的时候,将存储最久的或最近最少使用的数据块写入外层缓存。当内层缓存缺失时,首先检查写缓冲区。
第二个问题是,如果要写入字节的数据块不在高速缓存中时,是否将其读入高速缓存中。上面所讲述的情况都是假设在写D-cache时,要写入的地址总是D-cache中存在的,而实际当中,有可能发现这个地址并不在D-cache中,这就发生了写缺失(write miss),此时最简单的处理方法就是将数据直接写到下级存储器中,而并不写到D-cache中,这种方式称为写不分配(Write non-Allocate)。与之相对应的方法就是写分配(Write Allocate),在这种方法中,如果写cache时发生了缺失,会首先从下级存储器中将这个发生缺失的地址对应的整个数据块(data block)取出来,将要写入到D-cache中的数据合并到这个数据块中,然后将这个被修改过的数据块写到D-cache中。如果为了保持存储器的一致性,将这个数据块也写到下级存储器中,这种方法就是刚才提到的写直达(Write Through)。如果只是将D-cache中对应的line标记为脏(Dirty)的状态,只有等到这个line要被替换时,才将其写回到下级存储器中,则这种方法就是前面提到的写回(WriteBack)。Write Allocate为什么在写缺失时,要先将缺失地址对应的数据块从下级存储器中读取出来,然后在合并后写到cache中?因为通常对于写D-cache来说,最多也就是写入一个字,直接写入cache的话,会造成数据块中的其它部分和下级存储器中对应的数据不一致,且是无效的,如果这个cache line由于被替换而写回到下级存储器中时,就会使下级存储器中的正确数据被篡改。
写直达策略可能会使用写分配或者写不分配策略。然而,一个写回策略通常会使用写分配策略,否则如果使用写不分配策略,写缺失会被直接传播到外层存储层次,从而变的与写直达相似。
对于多核处理器设计来说,往往最后一级cache(last level cache,LLC)是所有处理器共享,而其它级cache是某处理器独享,因此还有一个写操作如何传播的问题。有两种实现方式:写更新(write update)和写无效(write invalidate)。区别是对某个处理器的缓存中的某个值执行写操作时,对于保有该数据副本的其他所有缓存的值是全部更新还是全部置为无效。
多级cache的包含策略
在多级高速缓存的设计中,另一个相关的问题是内层高速缓存的内容是否包含在外层高速缓存中。如果外层高速缓存包含了内层高速缓存的内容,则称外层高速缓存为包含的(inclusive),相反如果外层高速缓存只包含不在内层高速缓存中的数据块,则称外层高速缓存是排他的(exclusive)。包含性和排他性需要特殊的协议才能实现,否则无法保证包含性或者排他性,这种情况称之为不包含又不排他(non-inclusive non-exclusive,NINE)。
包含策略的优点是,前处理器缓存缺失的时候想看看所需的块是不是在其他处理器的私有cache中,不需要再去一个个查其他处理器的cache了,只需要看看共享的外层cache中有没有即可,对于实现cache一致性非常方便,也有效降低了缓存缺失时的总线负载和miss penalty;缺点是整体cache的容量变小。
包含策略的特性会产生两个影响。一是在采用包含策略的高速缓存中,缓存缺失的时延较短,而采用排他和NINE策略则较长。二是对对所有内层高速缓存检查访问的数据块是否存在意味着增加对高速缓存控制器和内层高速缓存标签阵列的占用。
排他策略正好相反,其优点是,可以最大限度的存储不同的数据块,相当于增大整体了cache的容量;其缺点是需要频繁填充新的数据块,会消耗更多的内外层间缓存带宽,并且对标签和数据阵列产生更高的占用率。
Cache的替换策略
在一个cache set内的所有line都已经被占用的情况下,如果需要存放从下游存储器中读过来的其它地址的数据,那么就需要从其中替换一个,如何从这些有效的cache line找到一个并替换之,这就是替换(cache replacement)策略。常见的替换算法有以下几种:
- 先进先出(FIFO)算法
- 最不经常使用(LFU)算法
- 近期最少使用(LRU)算法
- 随机替换算法
评价cache数据替换策略的标准是,被替换出的数据块应该是将来最晚被访问的数据块。这也好理解,就是要尽量降低随后访问的缓存缺失。目前,大部分高速缓存采用LRU或者近似的替换策略。但是LRU的性能也不是完美的,特别是当程序的工作集远大于缓存大小时,LRU的性能会出现断崖式下跌。
-
#硬声创作季 #硬件 微机原理与接口技术-09.07.01 Cache存储器水管工 2022-09-27
-
嵌入式多媒体应用的存储器分配方法2019-07-02 0
-
请问嵌入式设备中片上存储器该怎么使用?2019-11-11 0
-
CPU对存储器的读写2021-12-10 0
-
嵌入式CPU指令Cache的设计与实现2009-08-05 504
-
一种可配置的Cache RAM存储器的设计2010-01-25 493
-
什么是缓存Cache2010-01-23 760
-
什么是Cache/SIMD?2010-02-04 521
-
高速缓存(Cache),高速缓存(Cache)原理是什么?2010-03-26 6734
-
内存储器的分类2019-01-07 32939
-
高速缓冲存储器Cache的原理、设计及实现2019-04-02 2004
-
为什么要在CPU和DDR之间增加一个cache呢?2023-03-06 3274
-
Cache工作原理讲解 Cache写入方式原理简介2023-10-17 517
-
Cache工作原理是什么2023-10-31 538
-
全面解析存储器层次结构原理2023-12-25 334
全部0条评论

快来发表一下你的评论吧 !
