

超声波传感器的主要参数和测距原理
MEMS/传感技术
描述
1. 超声波传感器的定义
声音以波的形式传播称为声波。频率大于20000Hz的声波称为超声波,频率小于20Hz的声波称为次声波,频率为20~20000Hz的声波就是人能够听见的声波。
超声波传感器也称超声波雷达,它是利用超声波的特性研制而成的传感器,是在超声波频率范围内将交变的电信号转换成声信号或将外界声场中的声信号转换为电信号的能量转换器件。超声波传感器有一个发射头和一个接收头,安装在同一面上。在有效的检测距离内,发射头发射特定频率的超声波,遇到检测面反射部分超声波;接收头接收返回的超声波,由芯片记录声波的往返时间,并计算出距离值;超声波测距传感器可以通过模拟接口和IIC接口两种方式将数据传输给控制单元,如图2-15(a)所示。图2-15(b)所示为博世公司第6代超声波传感器,它将反应时间提高了一倍,能够对近距离物体实现检测和对突然出现的障碍物(如行人、变化的场景等)进行快速响应。
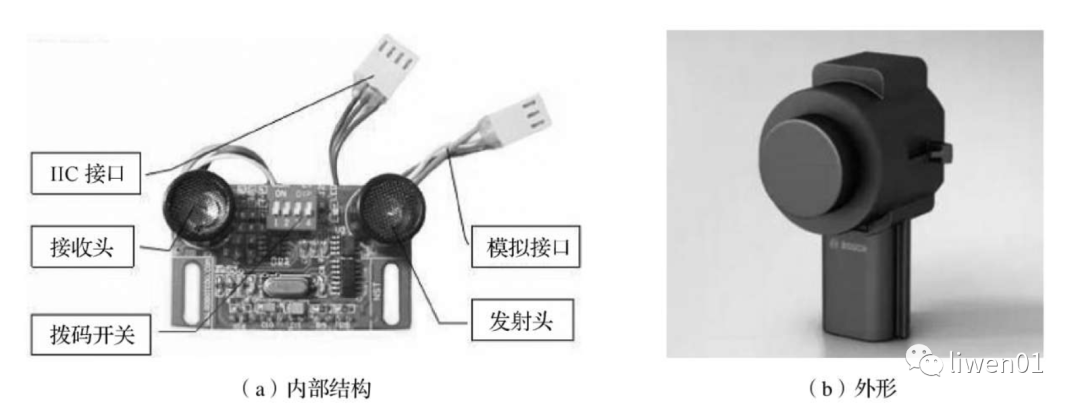
图2-15 超声波传感器
2. 超声波传感器的特点
(1)超声波传感器有效探测距离一般在10m之内,但会有一个最小探测盲区,一般为几十毫米,如图2-16所示。
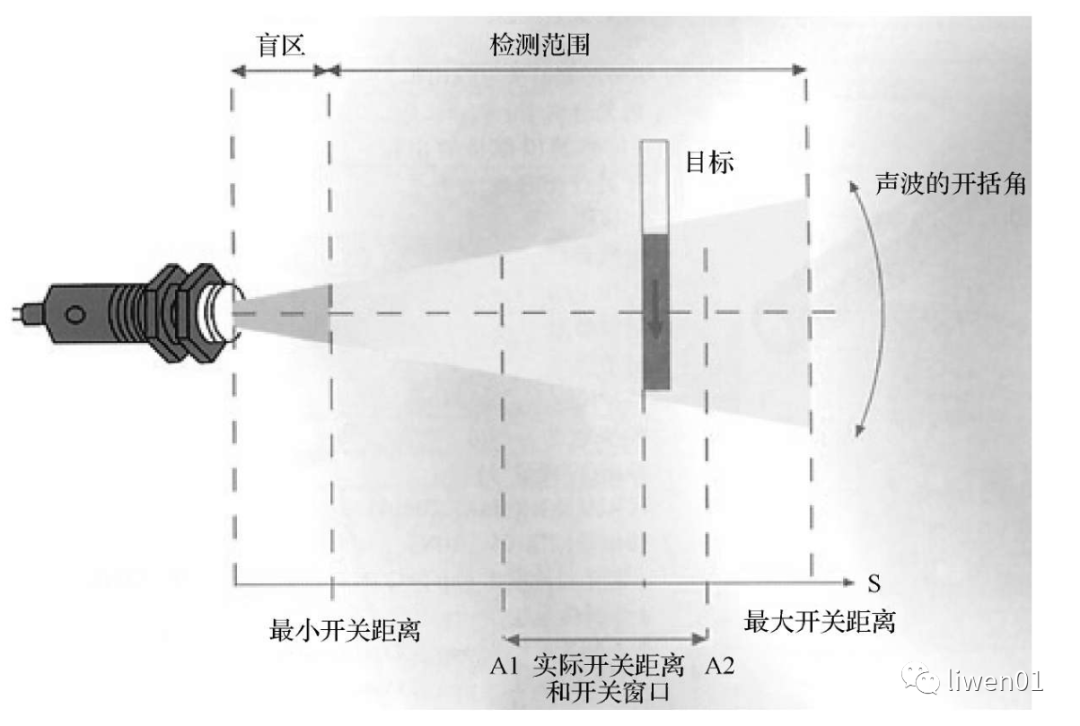
图2-16 超声波传感器的有效探测距离
(2)超声波对色彩、光照度不敏感,可适用于识别透明、半透明及漫反射差的物体。
(3)超声波对外界光线和电磁场不敏感,可用于黑暗、有灰尘或烟雾、电磁干扰强、有毒等恶劣环境中。
(4)超声波传感器结构简单,体积小,成本低,信息处理简单可靠,易于小型化与集成化,并且可以进行实时控制。
3. 超声波传感器的测距原理
超声波传感器适合于低速,在速度很高的情况下测量距离具有一定的局限性。这是因为超声波的传输速度容易受天气情况的影响,在不同的天气情况下,超声波的传输速度不同,而且传播速度较慢,当汽车高速行驶时,使用超声波测距无法跟上汽车的车距实时变化,误差较大。另一方面,超声波散射角大,方向性较差,在测量较远距离的目标时,其回波信号会比较弱,影响测量精度。但是,在短距离低速测量中,超声波传感器具有非常大的优势。
超声波传感器的测距原理如图2-17所示。超声波发射器发出的超声波脉冲,经媒质(空气)传到障碍物表面,反射后通过媒质(空气)传到接收器,测出超声波脉冲从发射到接收所需的时间,根据媒质中的声速,求得从探头到障碍物表面之间的距离。设探头到障碍物表面的距离为L,超声在空气中的传播速度为v(约为340m/s),从发射到接收所需的传播时间为t,当发射器和接收器之间的距离远小于探头到障碍物之间的距离时,则有L=vt/2。只要能测出传播时间,即可求出测量距离
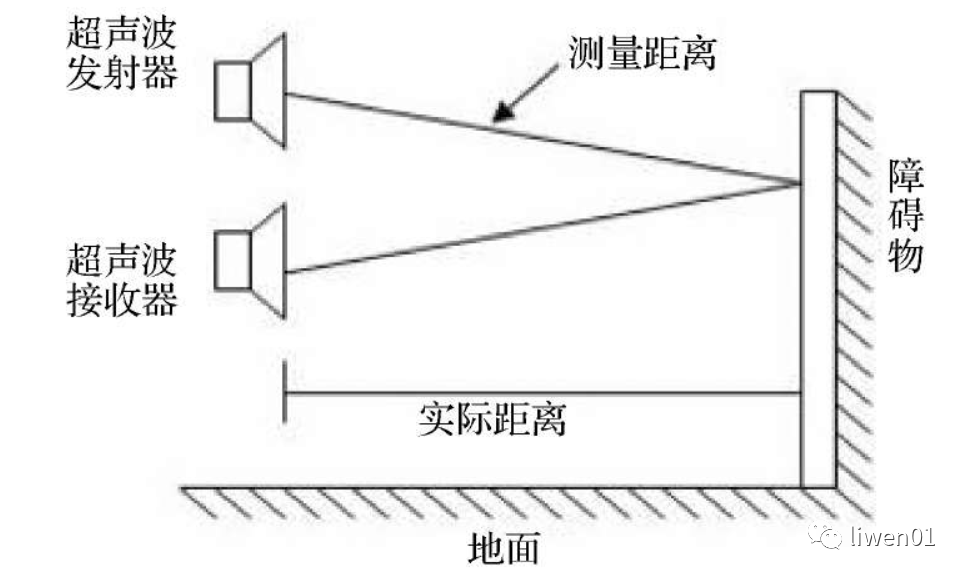
图2-17 超声波传感器的测距原理
4. 超声波传感器的类型
智能网联汽车上常见的超声波传感器有两种。第一种是安装在汽车前后保险杠上的,也就是用于探测汽车前后障碍物的传感器,探测距离一般为15~250cm,称为PDC传感器,也称为UPA(驻车辅助传感器);第二种是安装在汽车侧面的,用于测量停车位长度的超声波传感器,探测距离一般为30~500cm,称为PLA传感器,也称为APA(泊车辅助传感器)。如图2-18所示的汽车配备了前后向共8个UPA,左右侧共4个APA。
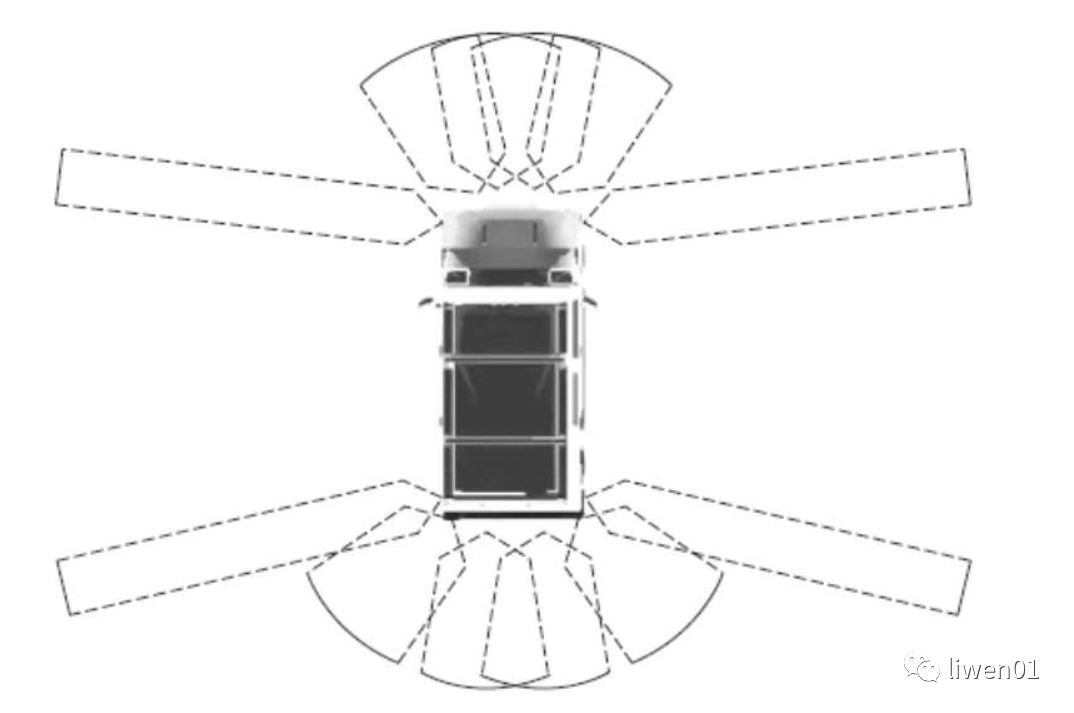
图2-18 超声波传感器的类型
5. 超声波传感器的主要参数
超声波传感器主要有以下特性参数和性能。
(1)测量范围。超声波传感器的测量范围取决于其使用的波长和频率;波长越长,频率越小,检测距离越大。测量汽车前后障碍物的短距超声波传感器探测距离一般为15~250cm;安装在汽车侧面、用于测量侧方障碍物距离的长距超声波传感器探测距离一般为30~500cm。
(2)测量精度。测量精度是指传感器测量值与真实值的偏差。超声波传感器测量精度主要受被测物体体积、表面形状、表面材料等影响。被测物体体积过小、表面形状凹凸不平、物体材料吸收声波等情况都会降低超声传感器测量精度。测量精度越高,感知信息越可靠。
(3)波束角。传感器产生的声波以一定角度向外发出,声波沿传感器中轴线方向上的超声射线能量最大,能量向其他方向逐渐减弱。以传感器中轴线的延长线为轴线,到一侧能量强度减小一半处的角度称为波束角。波束角越小,指向性越好。一些传感器具有较窄的6°波束角,更适合精确测量相对较小的物体。一些波束角为12°~15°的传感器能够检测具有较大倾角的物体
(4)工作频率。工作频率直接影响超声波的扩散和吸收损失、障碍物反射损失、背景噪声,并直接决定传感器的尺寸。一般选择40kHz左右,这样传感器方向性尖锐,且避开了噪声,提高了信噪比;虽然传播损失相对低频有所增加,但不会给发射和接收带来困难。
(5)抗干扰性能。超声波为机械波,使用环境中的噪声会干扰超声波传感器接收物体反射回来的超声波,因此要求超声波传感器具有一定的抗干扰能力。
6. 超声波传感器的应用
超声波传感器在智能网联汽车中有着广泛的应用,最常见的是自动泊车辅助系统,如图2-19所示。自动泊车辅助系统通常使用12个超声波传感器,车前、后部各4个短距超声波传感器负责探测倒车时与障碍物之间的距离,两侧的长距超声波传感器负责探测停车位空间。
特斯拉Model S就是主要靠摄像头视觉图像处理、毫米波雷达和超声波传感器实现传感的,特斯拉辅助驾驶使用的硬件包括前视摄像头、前置毫米波雷达和12个超声波传感器,如图2-20所示。图中①代表位于前后保险杠附近的超声波传感器,②代表位于挡风玻璃上后视镜下方的前视摄像头,③代表安装在前格栅中部的雷达监测装置。
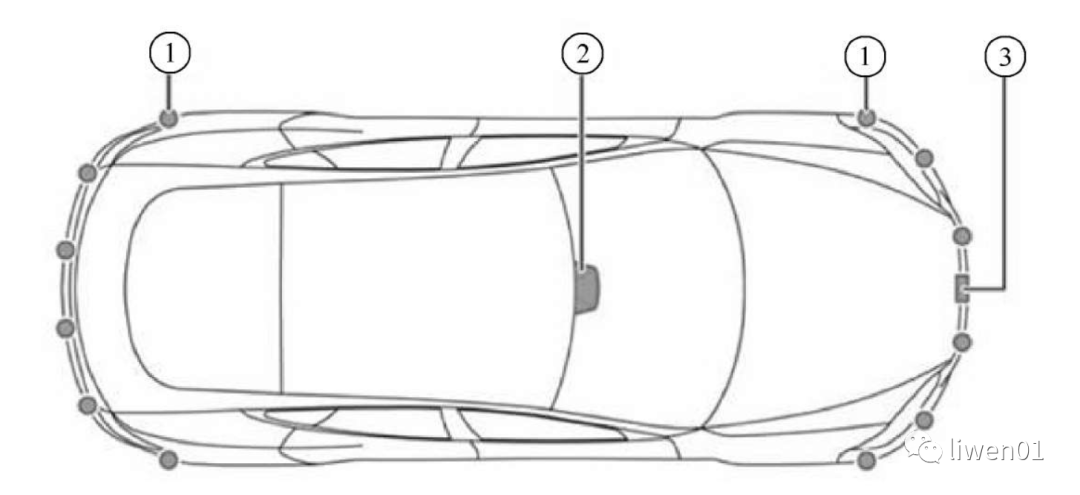
图2-20 特斯拉Model S环境感知传感器的配置什么位置?
编辑:黄飞
-
超声波传感器测距电路2008-10-20 0
-
基于超声波传感器的测距系统设计2009-12-15 0
-
超声波测距仪研究2011-03-04 0
-
超声波测距原理2012-04-25 0
-
基于STM32超声波测距设计的合集2018-09-05 0
-
超声波传感器及应用2018-10-29 0
-
如何检测超声波传感器的好坏2018-12-04 0
-
超声波传感器的主要用途2018-12-04 0
-
超声波传感器测距系统如何设计2020-04-23 0
-
超声波传感器的优势及原理2020-06-19 0
-
HC-SR04超声波测距模块原理2021-12-06 0
-
HC-SR04超声波具有哪些参数应用2022-01-07 0
-
超声波传感器的优缺点分析2023-04-21 0
-
超声波测距液位传感器的工作原理是怎样的2020-11-04 2577
全部0条评论

快来发表一下你的评论吧 !
