

WorkVisual将机器人控制系统配给实际应用的机器人控制系统
描述
用该操作步骤可将项目中的每个机器人控制系统分配给一个实际应用的机器人控制系统。然后,项目可从 WorkVisual 传输到实际应用的机器人控制系统中。
前提条件
在 WorkVisual 中已添加了一个机器人控制系统。
与实际应用的机器人控制系统的网络连接
实际应用的机器人控制系统和 KUKA smartHMI 已启动。
如果随后要传输并且也要激活项目:
在实际应用的机器人控制系统中已选择了专家或更高的用户组。
限制:如果激活会造成在与安全相关的通讯参数范围内的变化,则必须选择安全维护人员或更高用户组。
如果在实际应用的机器人控制系统中已选择了运行方式 AUT 或
AUT EXT:项目仅包含对 KRL 程序起作用的设置。如果项目中含有会造成其它变化的设置,则不能将其激活。
操作步骤
1. 在菜单栏中点击按钮安装 ...。窗口 WorkVisual 项目传输 自动打开。在左侧显示项目中的虚拟机器人控制系统。在右侧显示目标控制系统。如果尚未选择控制系统,则控制系统是灰色的。
将机器人控制系统分配给单元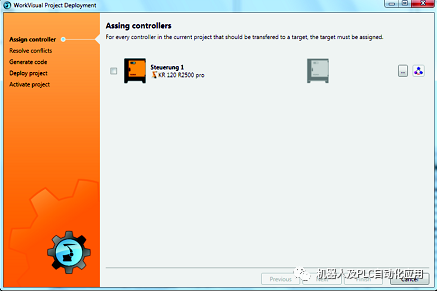
2. 在左侧通过复选框激活虚拟单元。现在必须给该单元分配一个实际应用的机器人控制系统。
3. 点击按钮 …。一个窗口自动打开。筛选器已自动设置,使得只显示与虚拟控制系统具有相同类型和版本的控制系统。该设置可以更改。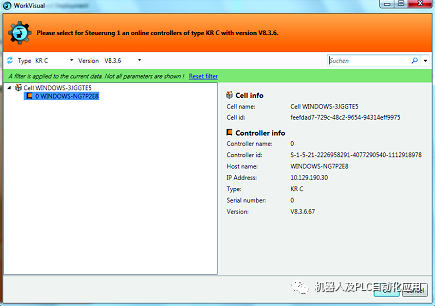
将实际应用的机器人控制系统分配给虚拟系统
4. 选择所需的实际应用的机器人控制系统并点击 Ok。实际应用的机器人控制系统即配给了虚拟机器人控制系统。
实际应用的机器人控制系统在分配后显示为彩色,并显示名称和 IP 地址。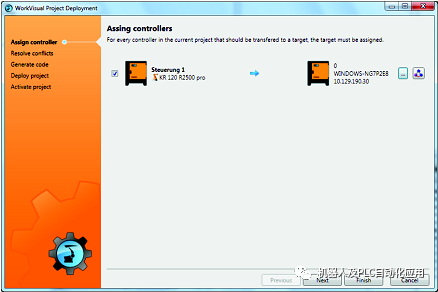
5. 如果项目有多个机器人控制系统,则为其它机器人控制系统重复步骤 3 和 4。
6. 点击 继续。即检查分配是否有冲突。如果有冲突,会显示一条信息。冲突必须解决,否则不能传输项目。如果没有冲突,将自动生成代码。
7. 该项目现在可被传输给机器人控制系统。 项目也可在以后某时进行传输。
为此点击退出:分配被保存,窗口 WorkVisual 项目传输 自动关闭。
将项目传输给机器人控制系统 以此方式将项目从 WorkVisual 传输到实际应用的机器人控制系统中。
如果在实际应用的机器人控制系统上有一个项目,在先前某时已被传输但从未被激活,则会在传输另一个项目时被盖写。
通过某个项目的传输和激活,一个在实际应用的机器人控制系统上的同名项目被盖写 (在安全询问之后)。 前提条件
项目已配给实际应用的机器人控制系统。
分配时的冲突已解决。
与实际应用的机器人控制系统的网络连接
实际应用的机器人控制系统和 KUKA smartHMI 已启动。
如果也要激活项目:
在实际应用的机器人控制系统中已选择了专家或更高的用户组。
限制:如果激活会造成在与安全相关的通讯参数范围内的变化,则必须选择安全维护人员或更高用户组。
如果在实际应用的机器人控制系统中已选择了运行方式 AUT 或 AUT EXT:项目仅包含对 KRL 程序起作用的设置。如果项目中含有会造成其它变化的设置,则不能将其激活。
如要传输某个项目且该项目含有一个已经添加到项目中的备选软件包,但没有显示列有更改的窗口,则必须遵照以下的操作步骤:
1.将项目传输到机器人控制系统中,但不激活!
2. 将备选软件包安装在机器人控制系统上。 按照常规方式进行安装。有关信息请查阅备选软件包的文献。
3. 将激活的项目从机器人控制系统传输给 W orkVisual 并进行用户配置。
4. 将项目重新传输给机器人控制系统。
5. 在机器人控制系统中激活项目。
操作步骤
1. 在菜单栏中点击按键安装 ...。窗口 WorkVisual 项目传输 自动打开。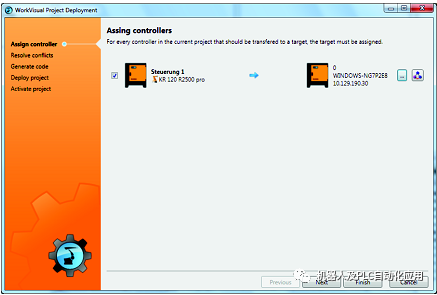
2. 点击 下一步。即会启动程序生成。
3. 点击 下一步。项目被传输。 当某个项目已被传输且该项目含有一个已经添加到项目中的备选软件包,但没有显示列有更改的窗口时:不得激活此项目,即不得继续下一个步骤!请注意本章节开始部分关于带备选软件包之项目的说明!
4. 点击 下一步。 在运行方式 AUT 和 AUT EXT 状态下,只涉及程序变动的项目无需经过安全问答即可激活。
5. 仅限于运行方式 T1 和 T2:KUKA smartHMI 显示安全询问允许激活项目 […] 吗。另外还显示是否通过激活以覆盖一个项目;如果是的话,是哪一个如果没有相关的项目要覆盖:在 30 分钟内用是确认该询问。
6. 显示与机器人控制系统中尚激活的项目相比较所作更改的概览。通过复选框详细信息可以显示相关更改的详情。 如果概览中的标题与安全相关的通讯参数下被标为更改,即表示可以更改迄今为止的项目的紧急停止行为和 “ 操作人员防护装置 ” 信号。
因此在激活项目之后,必须检查紧急停止和 “ 操作人员防护装置 ” 信号的功能是否可靠。如果项目在多个机器人控制系统上激活,则须在各个机器人控制系统上进行这一检查。如果没有进行检查,则可能会造成死亡、身体受伤或财产损失。
7. 概览显示安全询问 是否继续 ?。用是回答。该项目即在机器人控制系统中激活。对此在 WorkVisual 中即显示一条确认信息。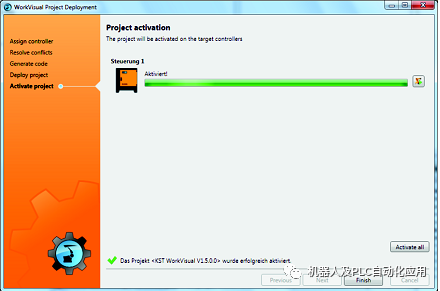
如果通过激活项目安装了一个备选软件包,之后必须从机器人控制系统载入该项目。否则在项目上进一步工作时可能会导致文件不一致且无法再重新传输项目。
8. 点击 结束按钮关闭窗口 WorkVisual 项目传输 。
9. 如果未在 30 分钟内回答机器人控制系统的询问,则项目仍将传输,但在机器人控制系统中不激活。该项目可单独激活。
项目可在机器人控制系统上从 WorkVisual 激活。
项目可直接在机器人控制系统中激活。
审核编辑:刘清
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 0
-
移动机器人运动控制系统设计及控制算法研究2012-08-20 0
-
工业机器人上用的控制控制系统有哪些厂商呀?2015-01-23 0
-
如何系统性地学习工业机器人技术?2016-03-06 0
-
嵌入式服务机器人控制系统能实现什么功能?2019-10-15 0
-
嵌入式机器人控制系统设计的组织架构是怎么样的?2020-03-06 0
-
基于CAN总线和双传感器仿人机器人运动控制系统的研究2020-08-19 0
-
有关机器人控制系统的基本知识都总结好了2021-06-30 0
-
关于机器人控制系统的这几方面知识你必须掌握2021-07-05 0
-
机器人系统与控制需求简介2021-09-08 0
-
机器人的控制系统2021-09-13 0
-
什么是机器人控制系统2021-10-11 0
-
如何使用树莓派开发智能机器人控制系统2021-12-23 0
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 0
-
WorkVisual将机器人控制系统配给实际应用的机器人控制系统步骤2023-03-08 2748
全部0条评论

快来发表一下你的评论吧 !
