

车载系统的GPS接收机射频前端的设计方案
RF/无线
描述
GPS(GLOBLE POSITIONING SYSTEM)是一种可以定时和测距的空间交会定点导航系统,它可以向全球用户提供连续、实时、高精度的三维位置、三维速度和实践信息。GPS提供两种服务:标准定位服务(SPS)和精密定位服务(PPS)。
利用GPS技术进行地面机动车辆的导航定位,无论在军用或民用领域,都有着广泛而重要的应用价值。现在各国正处于应用中的自动车辆定位导航(AVLN)系统组成方案具有多样性,但就其系统结构而言主要包括三大部分:车载系统、通信系统、中心控制管理系统。
车载系统应用环境的特殊性对电路性能具有更高的要求,而射频电路的设计是实现高性能的关键。如果射频电路设计不好,接收机的噪限灵敏度和信噪比以及其它技术指标都会大大下降,从而影响所接收信号的效果。
图1所示为自动车辆定位导航(AVLN)系统组成框图,其中GPS接收机前端中射频电路的设计将是本文讨论的重点。
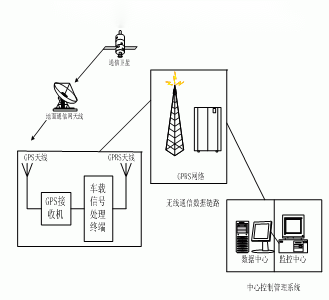
图1:自动车辆定位导航(AVLN)系统组成框图
2.GPS接收机射频前端的设计要求
2.1 GPS接收机的基本组成
大多数接收机有多个通道,每一个通道跟踪来自一颗卫星的发射信号。图2给出了一般性的多通道GPS接收机的方框图。
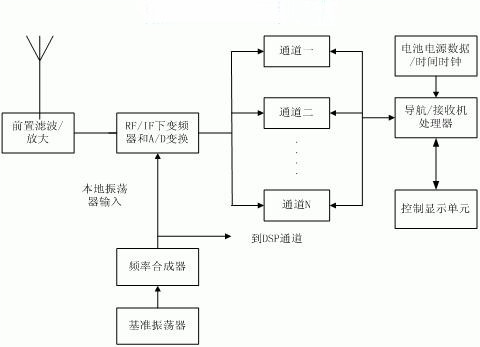
图2:一般GPS接收机基本结构框图
接收到的RF CDMA卫星信号先用一个无源的带通滤波器滤波,以减小带外射频干扰。常规情况下后面接着是一个预放。然后射频信号下变频到中频(IF)。在典型的现代接收机方案中,用A/D变换器对IF信号采样和数字化。A/D采样速率典型情况下为PRN基码速率的8~12倍。最小采样速率是码的带止带宽的2倍以满足奈魁斯特判据。过采样会降低接收机对于A/D量化噪声敏感度,因而减少在A/D变换器中所需的位数。采样送到数字信号处理器中。DSP中包含N个并行通道,以同时跟踪来自最多达N颗卫星的载频和码。每个通道中包含码和载波跟踪环,以完成码和载波相位测量,以及导航电文数据的解调。
2.2射频干扰对跟踪的影响
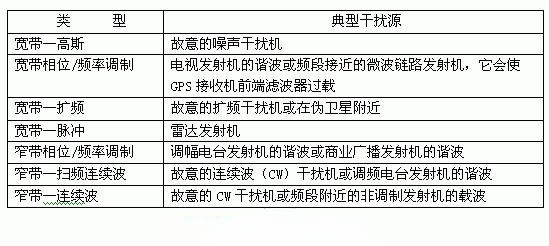
因为GPS接收机依赖于外部RF信号,所以它们容易受RF干扰的影响。RF干扰可能会引起导航精度的降低或接收机跟踪的完全丢失。表1概括了各种RF干扰类型。RF干扰可能是无意的或有意的。尤其在车载GPS接收机的设计中,更要考虑到路面状况和车载本身移动性所造成的干扰。
表1:各种RF干扰类型
2.3射频前端设计要求
接收机的RF部分包括从天线到数字处理器之间的所有部件。这一定义明确表示RF前端包括RF放大器、滤波器、下变频器、增益控制和本地信号发生器。RF前端也包括天线及支持RF工作的供电线路等。我们知道,C/A码是以码速率1.023MHz调制在1575.42MHz的扩谱信号。到达天线的卫星信号功率大约为-130dBm,深埋于热噪声电子之下(-114dBm/MHz).因此RF前端必须将该信号放大到某一电平之上,使得该信号可以为数字处理器所利用,假定该电平为0dBm/MHz,则要求前端总增益不低于110dB。
RF电路还必须将载波1575MHz下变频到数字处理器工作频率范围之内即最后一级中频IF。从RF到IF的转换可通过一级或几级下变频实现,IF与转换级数的选择对RF设计是很重要的。目前GPS接收机的设计大都采用二级或多级转换将RF变到IF。这是因为在不同频率点分配增益稳定性较好,并且由于更多的优化滤波可提高接收机抗干扰能力。
上述三部分——放大、下变频和滤波是接收机RF前端设计的主要部分,另外两部分为自动增益控制(AGC)和本地振荡信号发生器。RF硬件最后一部分是产生所要求的本地振荡信号。不管下变频级数多少,每级均要求一个稳定的本地振荡信号源,这可采用温补晶振TCXO参考源及PLL锁相压控振荡器VCO、倍频器、分频器来实现。
另外,GPS接收机噪声系数是系统性能指标应考虑的又一问题。对于民用接收机前端噪声系数为4~6dB时均可保证系统工作。
3.应用于车载系统的GPS接收机的设计实现
3.1 GPS射频前端的电路构成
GPS接收机的RF部分,通常是将天线接收到的GPS射频信号,经过低噪声放大器(LNA)的滤波和放大,与本机振荡器产生的正弦波信号进行混频,形成中频信号。大部分GPS接收机的本振采用的是精密的石英晶体振荡器为基准的频率综合器。中频信号除了在载波频率上变低以外,RF信号的所有调制的信号信息都转移到中频信号上。在GPS接收机模拟部分与数字部分之间必须有个模数(A/D)变换器,有的直接采样接收机面对的不是中频信号,而是直接对RF信号进行A/D采样。这在低价位的混合模拟(A/D)芯片中,未带来优势,直接采样不但要高速A/D转换器,更重要的是增加了后面数字部分的处理工作量。如下图3为应用于车载的GPS接收机射频前端的电路设计。
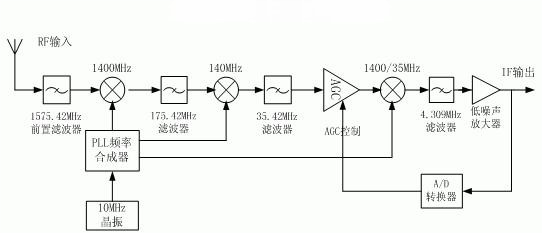
图3:GPS接收机射频前端
3.2 射频前端技术参数的设定
RF前端包括1400MHzPLL频率合成器、低噪放大器、三级混频器、2比特A/D转换器。前端接收1575.42MHz卫星信号,通过三级变频转换为4.309MHz IF。当前端与相关器配合使用时,后者提供5.714MHz采样时钟,将IF转换为1.405MHz 2比特数字信号以电平输出。第一级、第二级混频均为平衡开集输入输出,要求外部直流偏置及滤波。设计中175.42MHz滤波器采用带宽较宽的简单的两级LC参差调谐滤波器,而第二级则采用1dB带宽为1.9MHz的声表面滤波器,具有较好的带外抑制能力,对系统滤波性能起了决定性的作用。另外,两种滤波器的插入损耗也是不同的,前者较低而后者较高,从整体上来说,两者性能是互补的。第三级输出IF采用片内滤波。其中增益量化表达式为:
-l 74dBm/Hz 19dBm+G1+G2+G3-21dB +63dB 》 -7dBm 其中:
1)-7dBm=AGC工作时IF输出所要求的典型电平
2)-174dBm/Hz=RF输入的背景噪声电平
3)19dB=低噪放大器增益与噪声系数之和
4)-21dBm=175MHz、35.42MHz滤波器插入损耗之和(175MHz滤波器插入损耗:0~5 dB,35.42MHz滤波器插入损耗:14dB~16dB)
5)63dB=2MHz带宽内噪声之和。
由上述表达式可获得对各级混频增益的要求,即:G1+G2+G3>106dB
G1、G2、G3增益及AGC增益范围为:
G1:11dB~25dB
G2:22dB~33dB
G3:106dB~G1-G2,最大为75dB 。
AGC动态范围为60dB,可满足系统对增益的要求。
4.小结
随着通讯技术和半导体集成技术的发展,GPS系统已被广泛应用于飞机导航、船舶进出港控制、各种车辆的定位与指挥调度、基站或无线本地环路定时等领域.近年来GPS系统,已经在大地测绘、海上渔用、车辆定位监控、建筑、农业等各个领域得到广泛应用。从九十年代我国引进GPS定位技术开始,经过十多年的市场培育,GPS定位应用进入了发展的最好时机,未来十年基于GPS的应用将会改变我们的生活和工作方式。
编辑:黄飞
-
双频带GPS/Galileo射频前端接收系统的设计方案2013-12-09 3070
-
基于车载系统的GPS接收机射频前端设计2019-06-26 0
-
GPS/Galileo双频双模接收机射频前端系统的设计方案介绍2019-07-09 0
-
车载GPS接收机工作原理与测试2019-07-18 0
-
怎么设计GPS接收机射频前端电路?2019-08-22 0
-
接收机的射频前端设计怎么实现?2019-08-22 0
-
怎么实现软件接收机的GPS信号实时采集方案的设计?2021-05-31 0
-
GPS接收机射频前端电路原理与设计2010-02-08 613
-
一种应用于车载系统的GPS接收机射频前端的设计2009-05-13 1051
-
全球定位系统信号接收机射频模块的设计2010-03-04 912
-
ARM核在GPS接收机的解决方案2011-12-15 2445
-
浅析:采用PLL技术的接收机射频前端的设计方案2019-03-14 1717
-
三款GPS接收机射频前端电路图解析2020-04-23 6581
-
如何使用PLL技术实现接收机射频前端的设计2020-09-23 671
-
如何设计一个GPS和Galileo双频双模接收机的射频前端2020-09-17 602
全部0条评论

快来发表一下你的评论吧 !
