

控制器软件之速度控制功能设计
电子说
1.2w人已加入
描述
速度控制和扭矩控制一样,是车辆控制的必须功能,如驻波时就需要进行速度控制,其设计需满足下面几点:
- 软件应该在10ms周期需求扭矩计算信号整合功能,输入信号为驱动模式、需求扭矩、转速、外部速度环的kpki,扭矩ramp,扭矩最大值和最小值,输出信号为:转速差值、Kp、Ki值,Pi积分限幅值、前馈扭矩值、扭矩Ramp、需求扭矩的上下限值。
- 能根据模式请求是否为自标定模式切换需求扭矩及扭矩Ramp值,当模式请求为自标定时,使用状态机给定的自标定扭矩及扭矩Ramp;反之,则使用CAN上的需求扭矩和扭矩Ramp值。
- 能根据模式请求是否为外部速度环切换速度环时的Kp值;若为外部速度环模式,则使用外部速度环的Kp值,反之使用内部Kp值;Kp、Ki值可以通过转速差值查表获得。
- 能根据模式请求进行模式切换,若需求为扭矩环时,输出前馈扭矩为需求扭矩值,其他用以PI计算的值全为0;若需求模式为速度环时,输出前馈扭矩为需求扭矩,PI计算参数为查表获取的Kp、Ki值,以及设定的积分限幅值;若需求模式为其他模式,则输出的所有PI参数为0且前馈扭矩为0。
- 软件应该在10ms周期加入需求扭矩计算功能,输入信号为转速差值、速度环Kp、Ki值、积分限幅值、前馈扭矩值,输出不加damping不加Ramp的扭矩需求值。
- 该模块应能通过增量式PI的模式计算转速控制的需求扭矩,并通过积分限幅值对积分进行限幅。
1 功能描述
1.1 信号整合模块
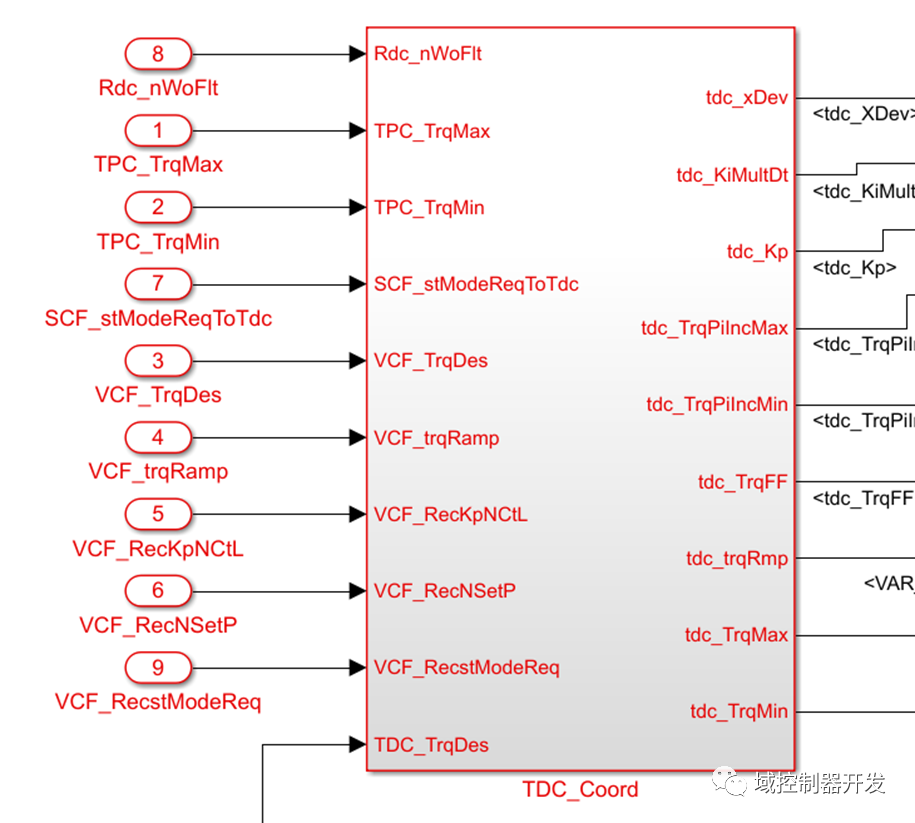
图1.信号整合
该模块内主要分两个子系统,第一部分主要是对输入信号进行前处理:
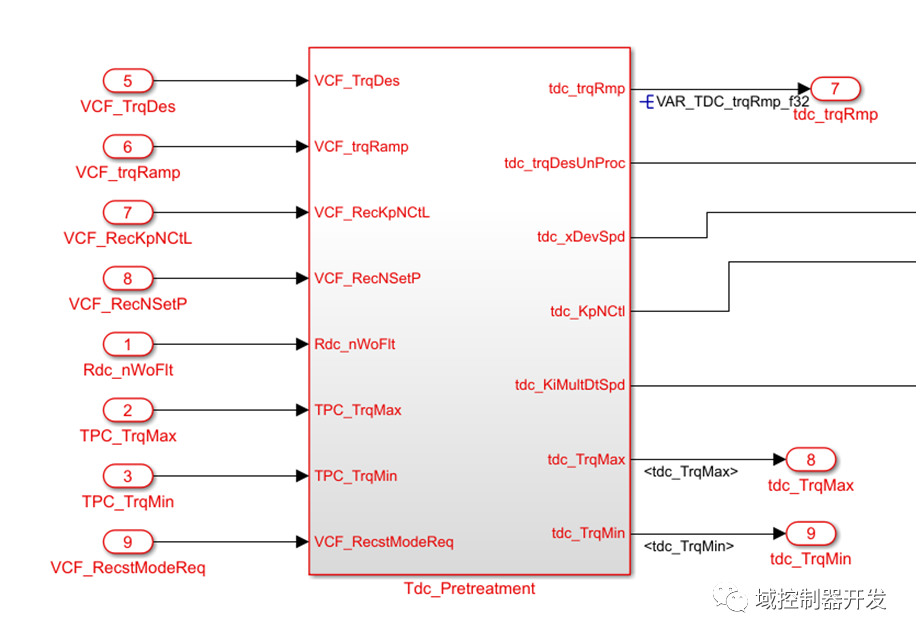
图2.信号前处理
第二部分是根据当前模式选择参数,模型框架如下图:
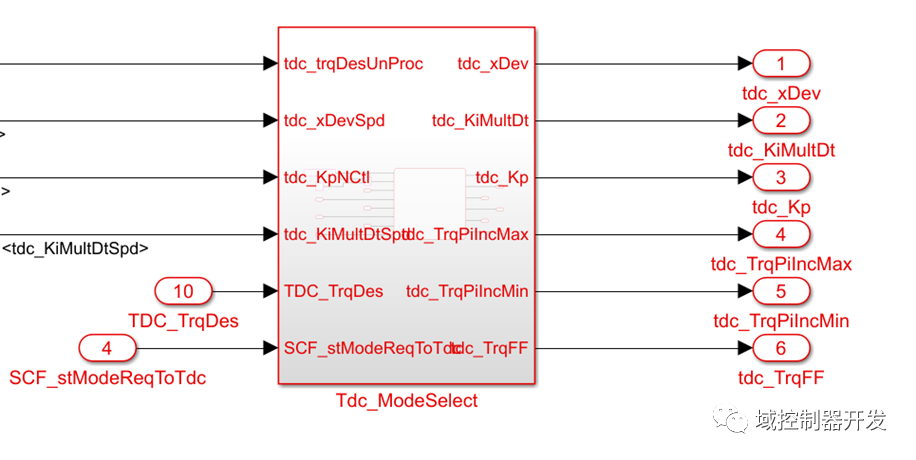
图3.参数选择模块
第一部分内部逻辑如下所示模型框图:
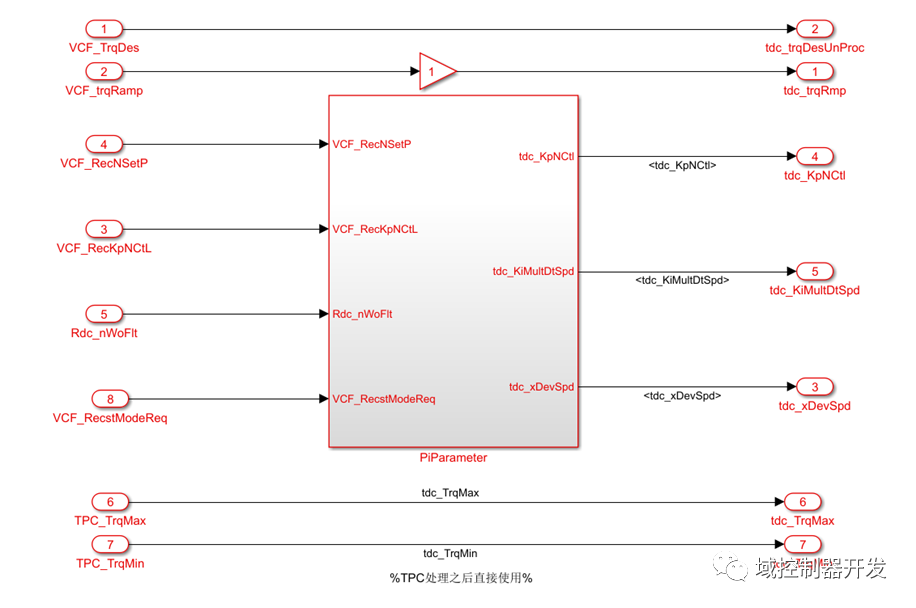
图4.信号前处理内部
从上图可知:
该子系统主要是PI参数选择模块,如下:
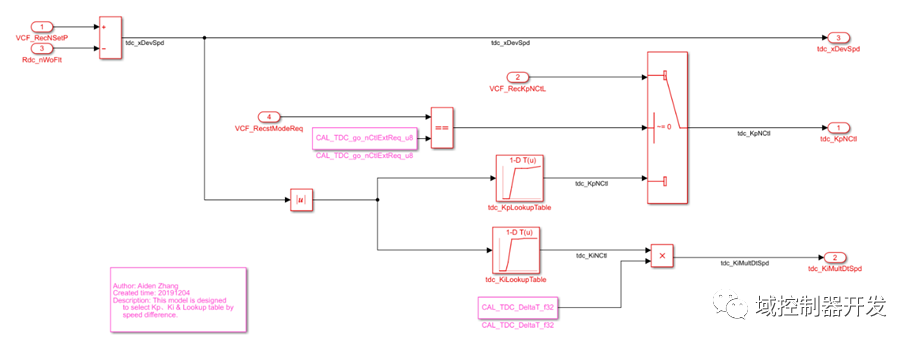
图5.参数选择内部结构
对于PI参数选择模块则为通过当前驱动控制模式请求是不是为外部速度环,若为外部速度环则使用外部的Kp值,当使用外部Kp值时,需通过需求转速与实际转速的差值tdc_xDevSpd判断使用快速的Kp值CSD_RecKpHighNCtL还是慢速的Kp值CSD_RecKpLowNCtL,当转速差值绝对值大于3000时,使用快速Kp值,反之,使用慢速Kp值;若为内部速度环则直接使用内部查表的Kp、Ki值,其中Kp、Ki通过转速差值查表得到。
1.2 速度环需求扭矩计算
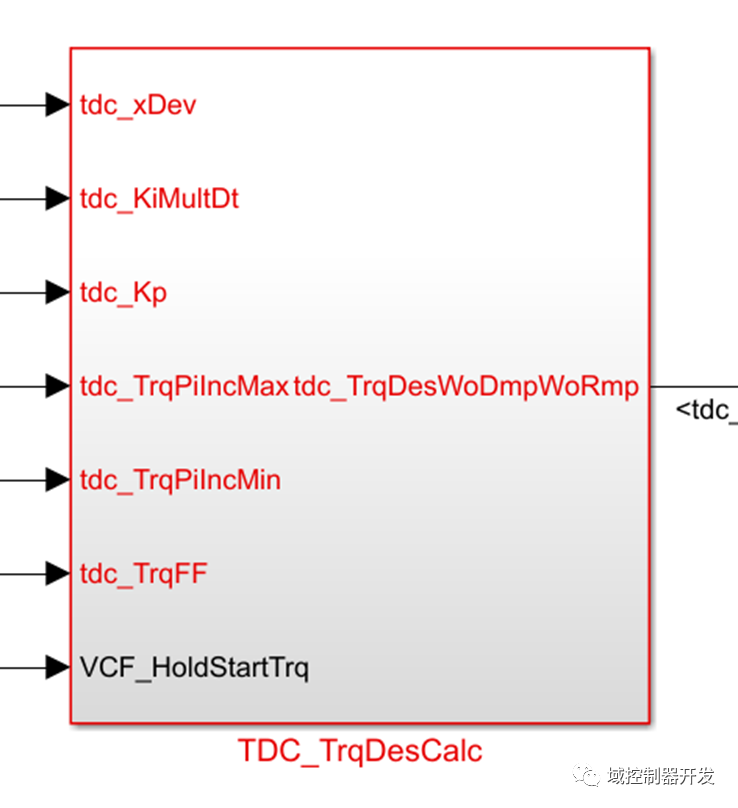
图6.需求扭矩PI计算模块
该模块主要是是用以计算速度环时的需求扭矩,该PI为增量式PI,通过增量式PI计算转速环时的扭矩,并对积分扭矩进行积分限幅防止积分饱和,其中前馈扭矩可以在模式切换时防止扭矩跳变,起到扭矩平滑过渡的目的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
织机选色器的功能设计2011-04-21 0
-
Labview 软件读取伺服控制器数据2017-06-21 0
-
BACnet控制器有什么功能?2019-09-20 0
-
纳米软件案例之精密运动控制器程控软件2021-01-12 0
-
控制器MP2200产品特点及功能介绍2021-09-02 0
-
PD控制器直流电动机速度控制2021-09-07 0
-
控制算法之PI控制器介绍2021-09-09 0
-
如何去实现一种基于STM32频率控制器的功能设计呢2022-01-25 0
-
硬盘步进电机速度控制器2022-08-05 0
-
如何使用DSP库中的PID控制器功能2023-08-31 0
-
自抗扰控制器在卷绕头速度控制中的应用2009-08-29 618
-
无线电控制的马达速度控制器电路图2009-04-09 1618
-
基于微控制器的多功能电动机保护装置实现2011-08-09 782
-
嵌入式运动控制器设计2018-02-08 1138
-
多功能控制器软件GoFast产品规格书2021-08-19 530
全部0条评论

快来发表一下你的评论吧 !
