

Buck基本原理及调制方式
电子说
描述
一、Buck架构
1、异步Buck
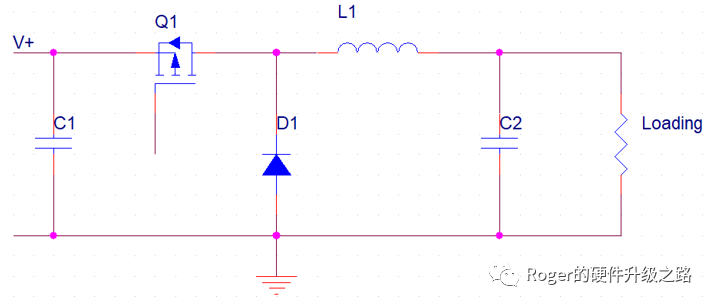
图1
如图1,异步BUCK由输入电容C1、开关管Q1、储能电感L1、输出滤波电容C2、续流二极管D1和负载组成。
为了后面公式计算,我们在这里定义参数,文中均统一:输入电压Vin、输出电压Vout、电感电流IL、电感电压VL、导通时间Ton、截止时间Toff、电感值L、开关频率fs、占空比D、开关周期为T
电路工作时,由PWM信号控制开关管Q1导通和关闭;在开管Q1导通时,续流二极管不导通,输入电压Vin给电感L1储能,由滤波电容稳压;我们知道电感阻碍电流变化,根据楞次定律可知电感升压公式,电压VL=L*di/dt;此时电感两端电流VL=Vin-Vout,因此电感电流的变化率di/dt=L/(Vin-Vout);可知Q1导通时电感电流是线性增加的,斜率为L/(Vin-Vout),是一个常数;
Q1关闭时,电感中储存的能量通过续流二极管D1形成回路给负载继续供电;电感需要释放存储的能量,此时电感产生反电动势使得续流二极管导通,续流二极管的负极电压为-Vd(电感左边节点),而电感右边节点是Vout,因此电感两端电压VL=-Vd-Vout,同理,电感电流的变化率di/dt=L/(-Vd-Vout);可知斜率是负的,电感电流线性减小。
开关电压、电感电流、开关电流以及二级管电流如下图所示:
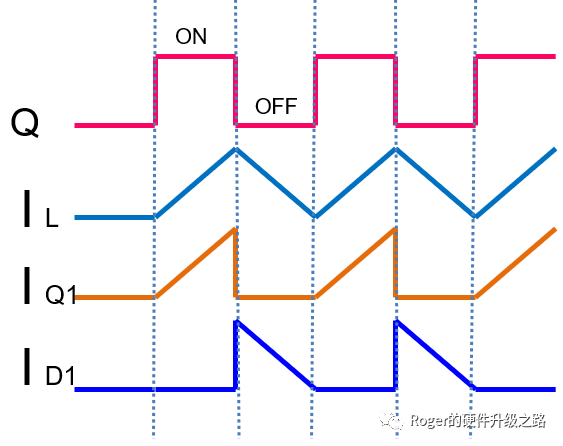
图2
2、同步Buck
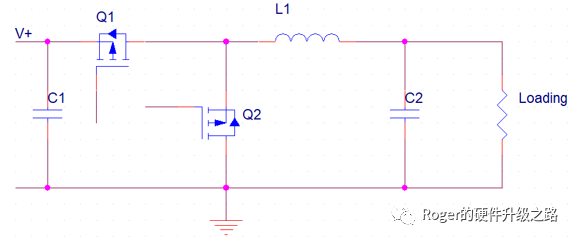
图3
如图3,同步Buck由两个MOS开关、储能电感、以及输出滤波电容组成,电路工作时,由PWM信号控制两个MOS管轮流交替导通,从而控制电感充放电,可以看出,与异步Buck架构区别是同步Buck使用MOS开关替代续流二极管。
在PWM信号周期中,当Q1导通,Q2断开,输入电流从Q1到电感充电,电感电压为VL=Vin-Vout,电感电流线性增加;
当Q1断开,Q2导通时,电感通过电容与Q2形成放电回路,此时电感电压为Vout。
同步Buck的充放电过程的计算与异步Buck类似,对应的电感、MOS电压、电流波形此处不再赘述。
3、同步Buck优缺点
优点
①毫无疑问,同步Buck的效率高是其最大优点,异步Buck在续流器件的损耗是IaVd(平均电流与导通压降相乘);而同步Buck的续流损耗来源于MOS的Rdson,一般都是几毫欧~几十毫欧,按照I2R计算损耗也是远远小于异步Buck;
②一般MOS都是集成在芯片内部,不需要额外的PCB面积,Layout工程师最爱。
缺点
①为了防止上下管同时导通的情况,需要对死区时间做控制,设计会比较复杂。
②同时,由于MOS价格比二极管高,而且需要控制电路,所以成本高。
二、脉宽调制方式
开关电源是按照一定的开关模式,不断开启和关闭开关,即对应的调制模式,一般有PWM、PFM、PWM-PFM三种调制模式。
1、PWM调制
PWM是脉冲宽度调制(Pulse Width Modulation),信号频率固定,改变的是占空比;PWM模式由误差放大器、锯齿波和比较器构成,误差放大器将输出反馈电压FB与基准电压差值放大,产生比较器需要的参考Vref电压;信号发生器产生固定频率的锯齿波;比较器输入为锯齿波和参考电平Vref,输出为VCC(开启电压))和GND;而通过改变参考电压Vref,即可改变占空比,如下图:
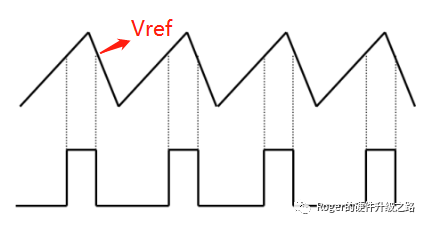
图4
PWM模式开关频率由锯齿波信号决定,占空比由前端反馈的误差电压信号决定,在重载工况效率比较高,输出纹波频率稳定,因此比较容易设计滤波电路。
但是在轻载工况下,效率较低,由于误差放大器的影响,在具有快速瞬态响应和高稳定性要求下需要有较好的补偿网络设计。
2、PFM调制
PFM是脉冲频率调制,信号占空比固定,改变的是信号频率。当电压输出电压较高时,关闭输出,输出电压较低时导通输出。
PFM模式静态功耗小,在不同工况下均有良好的效率,不过由于频率不固定,输出滤波器设计难度大,有EMI问题,纹波较大,而且可能会有频率导致人耳能听到的噪音。控制电路相比PWM更加负载,成本较高。
三、芯片内部架构
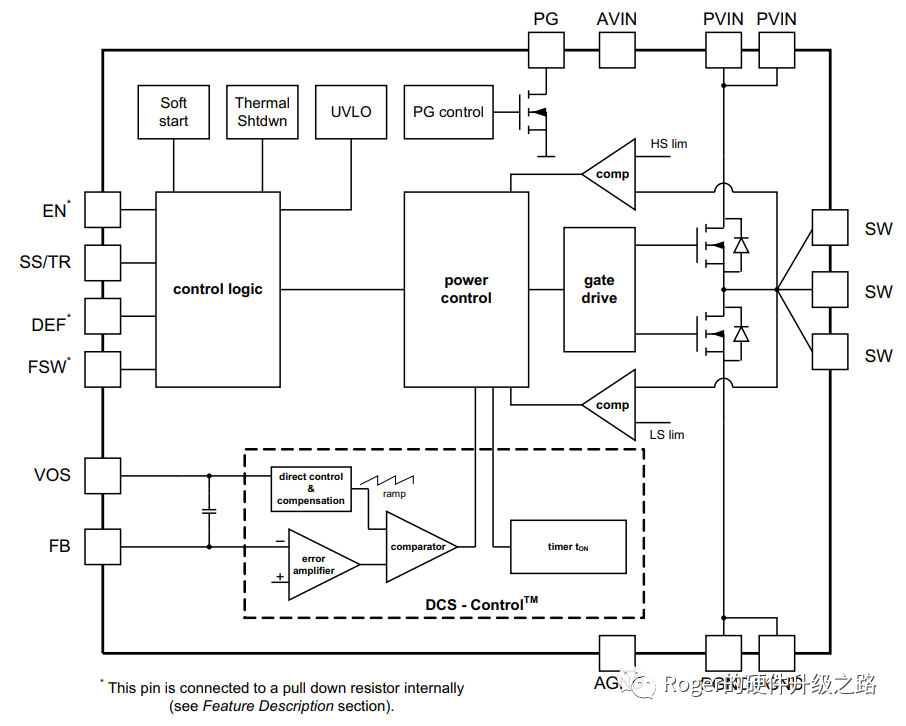
图5
如上图是TI的TLV62130RGTR,从规格书里面截取的芯片内部框架,不同厂家的设计大同小异,以此为例:
1、功率模块
功率模块主要由上下MOS管、MOS管驱动搭配外围电路的输出储能电感、滤波电容、自举电容等组成。
2、反馈比较模块
反馈比较模块包含电压比较控制和电流控制,电压反馈是提取反馈电压FB与误差放大器的基准电压做差值放大,从而控制开关信号,从而稳定输出电压,同时某些芯片也会做输出过压/欠压保护;
电流反馈控制是用来做过流保护,同时也可以用来检测电感电流是否过零点,判断芯片是否进入轻载高效模式。
说到反馈比较模块不得不提到带隙基准,作为误差放大器的基准参考源,是由正温度系数和负温度系数的电路构成的基准电压,不受电压和温度影响,仅由BJT/MOS的尺寸决定,主要是为其他电路提供稳定准确的参考源。详细原理请参考《模拟电子技术第六版-康华光版》第七章第一节关于电流源的讲解。
3、欠压保护
为了避免芯片工作在较低电压导致芯片异常,通常芯片会做输入欠压保护机制,当输入电压低于保护点时,芯片不进入工作状态。通常是使用迟滞比较器设置门槛保护点,从而控制开关逻辑。
4、过压保护
为了避免芯片工作在过高电压下工作导致芯片损坏,输入过压保护使芯片输入电压高于某一电压值时,芯片会关断输出进入过压保护状态,输入电压恢复到保护点以下再正常输出,不过如果输入电压过高,即使关断输出芯片也可能会损坏。
5、过流保护
为了避免SW引脚输出大电流损坏芯片,芯片会检测SW的最大电流,当Ipeak触发过流保护点,芯片会关断输出,输出电压会下降;有些芯片会限制Ipeak值,那么在负载增大时,电压也会下降。
6、过热保护
为了避免芯片由于温度过高损坏,当温度达到芯片保护点时,会触发热保护机制,关断SW引脚输出,温度降低后再恢复。一般是利用BJT的Vbe温度特性和施密特触发器来设置保护点,从而控制开关逻辑。
7、软启动
软启动是用来控制芯片开始工作时输出电压的上升时间,测试取10%90%输出电压的上升时间,一般在500us10ms;可以保证系统容性负载较大的情况下,减小冲击电流保护芯片;部分芯片软启动时间可以通过硬件/软件修改,有的是固定不可调的;
8、EN使能
一般是控制EN引脚来控制芯片是否工作,本质是一个施密特触发器,使能电压高于门限电压,芯片工作。通常为了调节系统电压时序,可以通过调节并联电容调节时序。
四、外围电路
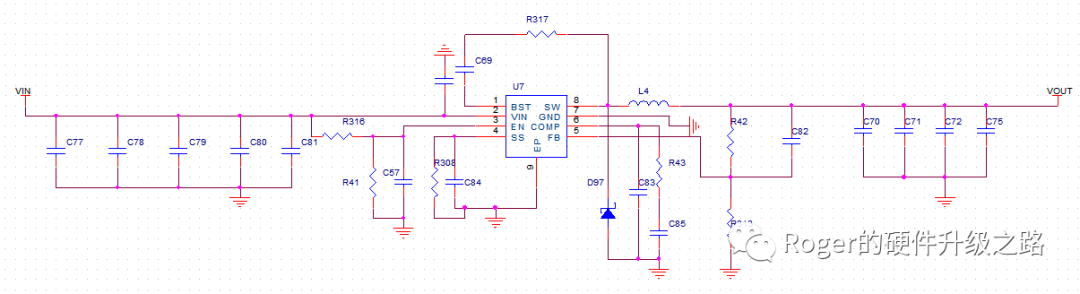
图6
如上图,是某Buck芯片的应用电路设计,外围电路包含以下:
1、供电输入
VIN输入脚需要保证不管芯片在什么状态下,输入电压都不得大于最高工作电压的80%,输入主要是输入电容,输入电容容值根据输入纹波电压、输出纹波电流等要求做计算,详细计算后文单独讨论;一般由低ESR的MLCC电容大小搭配,以减小等效ESR,并改善输入噪声;如上图C77、C78、C79、C80、C81,电容尽量靠近芯片引脚,尤其是高频电容。保证输入-芯片-功率地路径最短,一般铺铜走线。
2、自举电路
NMOS主回路电流是D到S极,导通条件是Vgs大于开启电压Vth,主回路是S极到D极,导通条件是Vsg小于Vth;因此一般将PMOS作为上管,VIN接S极,G给低电压即可导通,而NMOS作为下管,S极接地,只要给G极一定的电压即可导通;
但是现在很多芯片是用NMOS作为上管,此时上管S极已经是VIN,则需要G极大于VIN;此时就需要自举电容,利用电容两端电压不能突变,抬高G极电压,保证上管导通。如上图C69
为了改善EMI问题,通常会预留串接Rboot,如图R317,前文已提过改善Buck的方法。
3、使能电路
如图R316、R41构成分压,可以调节上下电时间;同时增加C57和R316构成RC延时,可以减缓系统上电,在对时序要求比较高时可以通过调节电容来微调时序。
有的同学在设计时是直接把VIN接到使能脚,需要注意的是要看芯片规格书,有些芯片内部的使能脚是有稳压管的,就不能直接接到VIN;
也有要求芯片上电时序软件可控,则可以把EN连接到主控,使用软件控制。
综上,EN脚一般有几种控制方式
①EN直接悬空,芯片带有float to enable功能的则会内部上拉接到VIN
②通过主控的GPIO控制
③电阻分压控制
④RC延时控制
⑤多电源协作,比如使用5V来使能3.3V的EN
4、取样电路
DCDC芯片反馈网络一般由两个分压电阻构成,如图R42、R313,Vout通过电阻分压输入至芯片的FB引脚,此引脚是接到芯片内部的误差放大器,与基准电压作比较,从而实现占空比控制。
两个电阻值大小会影响功耗、响应速度和噪声敏感度,应该与规格书取样电阻值相近。
部分系统为了降低整机功耗,通常会采用SVB技术,即动态调压技术,在芯片上电过程中,对满足场景的电压值进行微调,从而降低功耗。如下图:
R377和C323构成RC积分电路,将主控的PWM信号积分成直流电压
R377要远小于R376,否则会影响电压调节范围
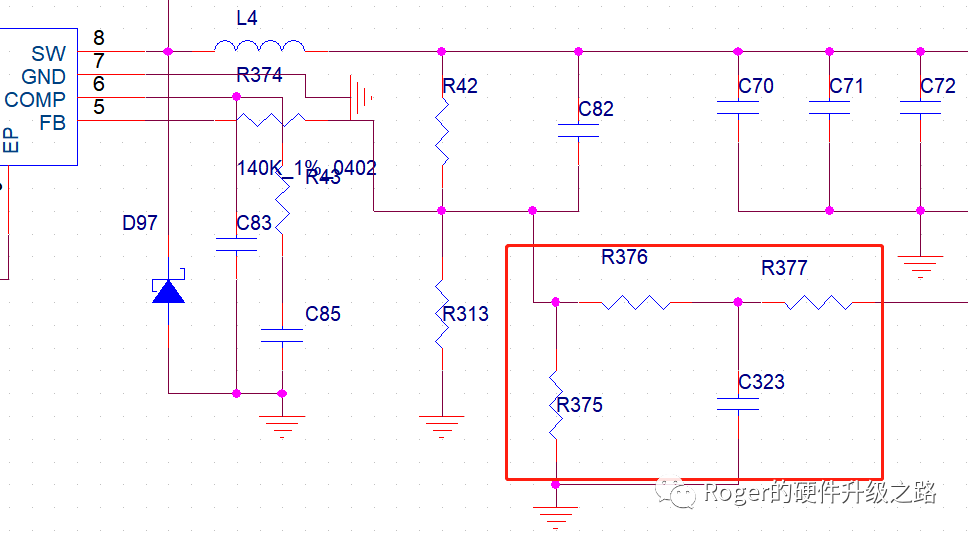
图7
FB信号经过取样电阻后比较敏感,因此走线一定要避开干扰源如SW信号或其他高频信号。
5、前馈电容
如图C82电容,如果电路没有此电容,反馈网络由上述分压电阻组成,当增加前馈电容后,反馈网络引入一对低频零点和高频极点,可以提升电源的带宽和响应速度,在针对后级突然负载增加造成电压跌落的情况,可以合理使用此电容。不过前馈电容的增加会恶化环路的相位裕量,因此需要测试环路稳定性。
6、RC吸收
前文提过的RC吸收电路,抑制开关的电压浪涌,改善系统EMI,上图电路没有添加,一般是RC加在SW引脚对地。
7、补偿电路
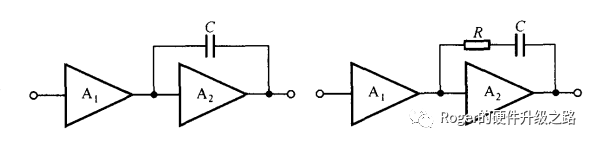
内部运放的输入和输出端需要有阻抗形成负反馈网络,可以使用电容或者电阻加电容,改变穿越频率点,破坏自激振荡条件,有利于环路稳定性。
8、输出LC
输出电感储能放电,与滤波电容构成Buck的基本拓扑,不做详述。
**9、其他
**
部分芯片有调节开关频率、IIC程控等功能
本文讲了Buck基本原理、调制方式、芯片内部模块以及外围电路等内容,仅冰山一角,待持续更新。
-
PWM的基本原理2021-08-17 0
-
SPWM的基本原理2021-09-06 0
-
占空比与脉宽调制(PWM)基本原理2021-09-07 0
-
无线充电的基本原理是什么2021-09-15 0
-
PWM的基本原理是什么2021-12-01 0
-
OLED驱动的基本原理及驱动方式2021-12-07 0
-
STM 32 UART串口通信基本原理是什么?2021-12-15 0
-
串口通信基本原理是什么?2022-02-18 0
-
脉冲宽度调制PWM的基本原理控制方式是什么2022-03-02 0
-
脉宽调制的基本原理及其应用实例2010-01-10 915
-
光调制器的基本原理2018-01-16 22135
-
BUCK降压器的最基本原理资料下载2021-03-29 469
-
Buck电路的基本原理,Simulink模型的获取方式2021-05-15 8171
-
Buck电路的基本原理2023-03-17 6603
-
Vienna整流电路的基本原理和调制方式2023-04-14 14633
全部0条评论

快来发表一下你的评论吧 !
