

 汽车成像雷达波形选择
汽车成像雷达波形选择
电子说
描述
本文首发于公众号【调皮连续波】,其他平台为自动同步,内容若不全或乱码,请前往公众号阅读。保持关注调皮哥,和1.5W雷达er一起学习雷达技术!
| 序号 | 类别 | 内容 | 文件路径 |
|---|---|---|---|
| 1 | 雷达研报 | 十余份雷达研报、研讨PPPT | 根目录雷达行业报告 |
【正文】
编辑|小助理 审核|调皮哥
本文主要解读论文:High-resolution Automotive Radar Point Cloud Imaging and Processing
原文链接:https://ieeexplore.ieee.org/abstract/document/9792662/authors#authors
汽车雷达成像雷达波形选择,到底是TDM、BPM、DDM,或者是TDMA+DDMA,或者还有其他,一起来看看这篇论文的介绍吧。
1、MIMO波形介绍
当今新兴的4D成像雷达(4D-radar)采用多芯片级联MIMO技术,可在方位角和仰角维度上实现高分辨率,提供高质量的三维点云成像。一般的汽车雷达芯片都有3个发射通道和4个接收通道,因此可以同时采用4芯片级联的MIMO方案,将虚拟阵列扩展到12×16=192个通道。
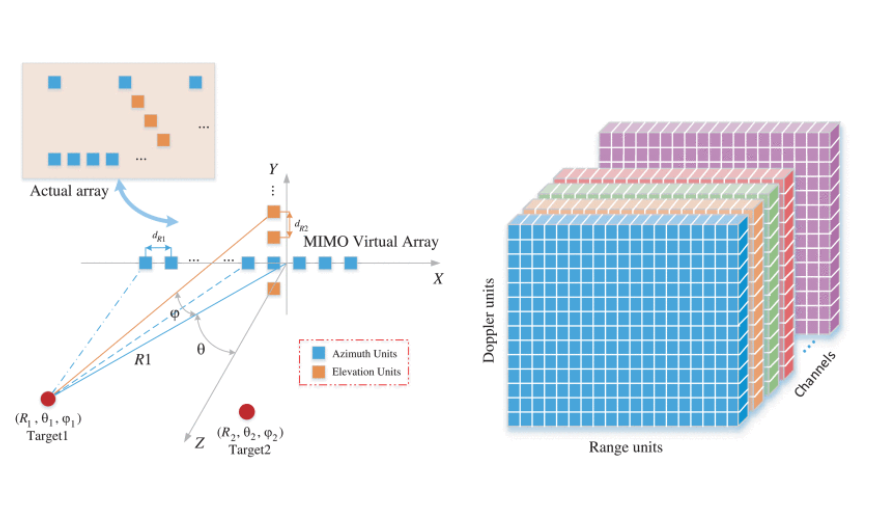
使用MIMO技术的汽车雷达中的虚拟阵列合成依赖于不同天线发射的发射信号的分离,目前采用的MIMO 雷达技术有三种模式,分别是TDMA-MIMO、DDMA-MIMO、BPMA-MIMO。
当不同天线的发射信号正交时,分离更容易,实现波形正交性的最简单方法是TDMA-MIMO,故TDMA-MIMO波形因其实现简单和高度正交性而成为目前应用最广泛的方法,但是TDMA-MIMO的缺点是发射功率低导致探测距离受限制,并且最大不模糊速度、距离分辨率与正交信号数量之间存在矛盾关系。虽然后续解决速度模糊问题的算法有很多,但频谱混叠造成的目标检测难度仍然严重,发射天线较多的情况更是雪上加霜。
BPMA-MIMO (相位编码)雷达利用码分多址 (CDMA) 技术,可以在不牺牲发射功率、带宽或线性调频持续时间的情况下有效地实现低互相关波形。由于不存在具有理想自相关和互相关特性的理想正交码序列,因此相位编码波形有时仅近似满足正交性要求。
相位编码MIMO雷达的主要问题是干扰的多普勒FFT将扩散到整个多普勒频谱中,如下图所示。最严重的影响是微弱的目标信号会被淹没在干扰信号中,例如当有卡车和行人在同一距离分辨单元中时,行人很可能无法检测到。
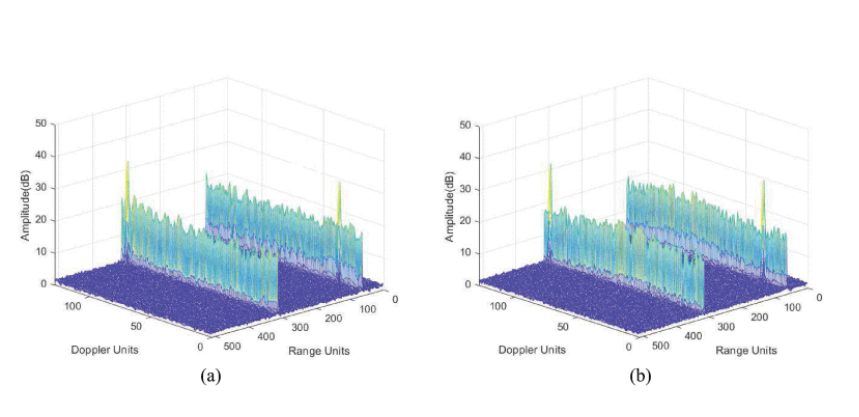
具有四个天线同时发射的相位编码MIMO的RD谱
(a) Gold序列,长度128
(b) Chu序列,长度128
DDMA-MIMO可以提高雷达探测距离,每个发射通道以一个较小和唯一的频率偏移同时发射相同的斜率的调频信号,这有效地将多普勒频谱中的每个发射信号分离,等效于正交性波形。然而,由于较小的多普勒偏移,导致发射通道间存在耦合,额外扩展的目标很容易重叠。
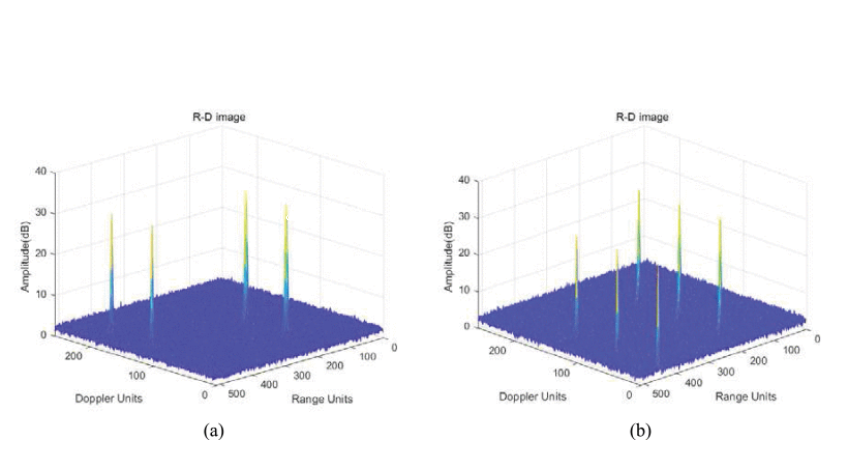
DDMA-MIMO RD谱
(a)同时发射两根天线
(b)同时发射三根天线
尽管在多普勒域中采用不同的多普勒频移调制每个发射阵元来实现波形正交性,但DDM-MIMO雷达技术存在一些缺点,限制了其在汽车雷达中的应用。
在多目标场景中,每个目标将在距离多普勒谱中生成一个真实位置,但在同一距离单元之间伴随着多根发射天线的干扰,当有多个目标在相同距离但速度不同时出现问题,真正的目标和干扰将被混淆。因此,如何缓解多目标场景下干扰带来的误报是关键问题。
三种波形的技术特点如下图所示:
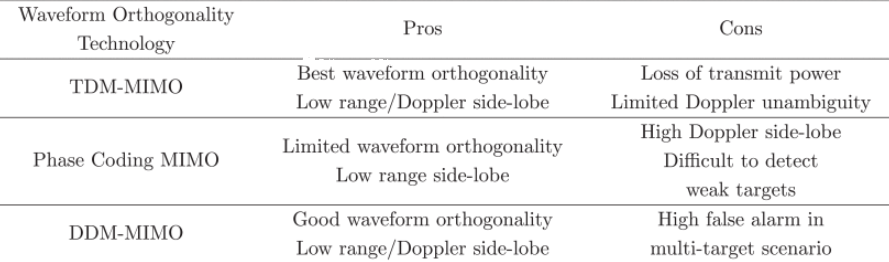
2、TDM+DDM-MIMO技术
根据上述的介绍和分析,仅仅采用波形正交性技术之一的DDMA或者TDMA来完成4D高分辨率成像汽车雷达的设计几乎是不可能的,因此必须考虑一种综合的方案,该论文设计了一个集成的TDM-DDM-MIMO的框架来获得折衷的性能。
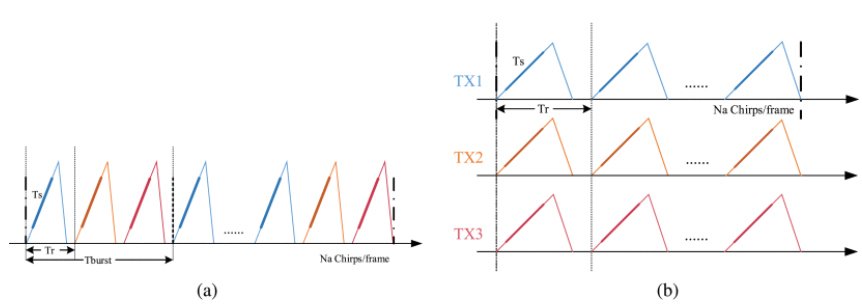
TDM-DDM-MIMO 技术利用了 TDMA 和 DDMA 的最佳波形正交性,多个发射天线同时发射信号也可以降低能量损耗。当采用与ARS540相同的芯片级联MIMO技术时,最多12个发射天线,TDM-DDM-MIMO框架可以设置为2个或更多的发射天线进行DDMA编码,但不建议同时使用4个以上的发射天线进行发射,因为干扰会严重降低目标检测性能。与TDM-MIMO技术相比,TDM-DDM-MIMO中距离多普勒谱所代表的最大不模糊速度将比单Chirp周期内发射的天线数量提高数倍,但干扰的影响会严重一些。
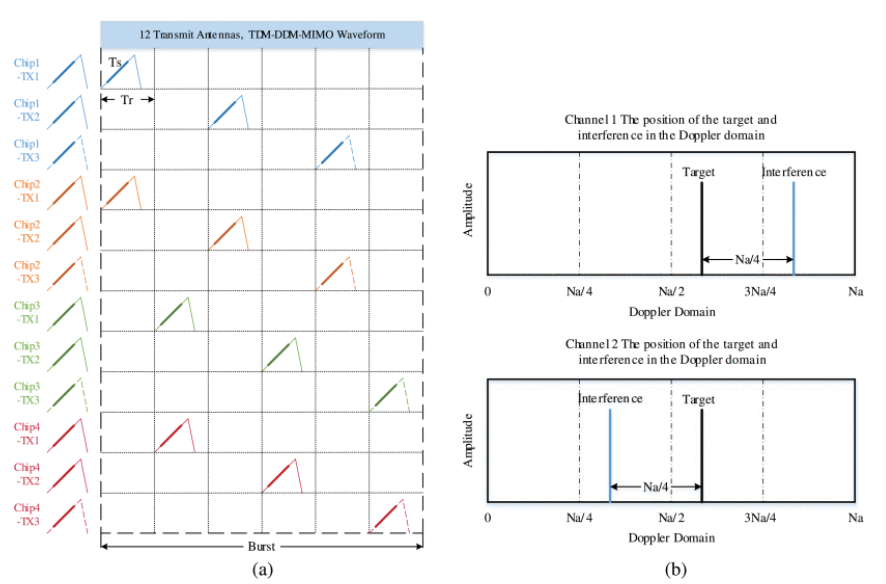
采用2个发射天线的TDM-DDM-MIMO汽车波形如上图所示,在两个不同通道的数据上使用多普勒FFT,干扰和目标将分布在多普勒域中,但干扰位于通道之间目标的不同侧,因此可以区分目标和干扰。
有两种特殊情况,一旦多普勒域中两个目标的坐标间距为Na/4或Na/2,Na为慢时间采样点,采用上述目标检测方法会出现虚假目标和真实目标估计不准确的情况。因此,需要添加更多的信息来区分目标和干扰,例如信号幅度、相位信息等。
个人心得:波形设计是4D成像雷达的关键技术之一,可以和天线布局与优化、超分辨算法和跟踪关联合称为4D成像雷达的四大核心技术!
【点击以下链接可直达各个业务模块】
| 加入年度会员 | |
|
雷达项目合作 |
|
【本期结束】
本文是空闲时个人的心得体会,仅供参考。目前我还有很多内容需要学习,如果还有没有说到或者不全面的地方,还请指正,感谢大家。
喜欢本文,可以转发朋友圈。欢迎关注【调皮连续波】和备用号【跳频连续波】。
审核编辑 黄宇
-
毫米波汽车雷达测试小结2018-08-04 0
-
RF成像分辨率怎么提高2019-07-08 0
-
汽车雷达:阵列天线设计步骤2020-06-15 0
-
常见的雷达波形样式2020-06-23 0
-
实现汽车倒车雷达系统的设计方法2021-11-12 0
-
汽车雷达不响的原因2022-04-10 0
-
认知雷达目标跟踪时的波形优化选择方法2017-12-21 797
-
R&S QAR:一种革新的成像式汽车雷达罩测试仪2018-10-19 4997
-
Arbe将开发基于成像雷达开发平台的新一代雷达系统2020-10-29 1472
-
如何使用波束实孔径雷达图像提升汽车雷达方位角分辨率的成像方法2020-11-30 1093
-
傲酷雷达推出商用4D成像毫米波雷达 ST推出汽车卫星导航芯片2022-03-14 3933
-
Mobileye和台湾启碁科技合作生产成像雷达2023-01-09 518
-
蔚来与恩智浦开展4D成像雷达合作2023-05-06 573
-
蔚来将采用恩智浦成像雷达解决方案2023-06-03 274
全部0条评论

快来发表一下你的评论吧 !
