

如何快速完成6自由度工业机器人的工具校准?
电子说
描述
随着机器人变得日益成熟,它们已经能够应用到处理越来越多的工业工序。6自由度(6Dof)机器人能够执行复杂的动作,因而可以在许多复杂的工业任务当中展示良好的性能,比如码垛、搬运、涂胶和焊接等。6自由度机器人可以提举和灵活地操纵重型载荷,并通过复杂的几何运动对载荷进行精确操控。
基于其良好的性能和灵活性,6自由度机器人被用来与各种工具相结合,应用于许多不同的任务。但是,每次引入新的工具时,都需要进行精确的重新校准,然后才能发挥这种机器人的能力。重新校准经常既耗费时间又不准确,妨碍了工业过程的顺利运作,对生产造成拖延。
Servotronix创造了一种有效的位置示教方法,可以对6自由度机器人所使用的新工具进行快速校准,并且不必依赖制造商测量或外部传感器。该方法简单、准确,对实际应用非常有效。
校 准
6自由度机器人执行任务时需要对工具进行保持和移动。为了达到令人满意的性能,机器人在工作时必须知道工具的精确位置。每次装配不同工具时,机器人都必须再次精确地校准。
校准6自由度机器人有不同的方法。比如与参考部件接触,使用距离传感器,以及使用激光干涉仪测量等。此外,可以将外部传感器,比如摄影系统,装在机器人的不同位置,以便获取机器人校准参照物体的精确位置。
这些方法既耗费时间,又比较复杂。Servotronix开发了一款更加简单的方法,并且已经实现了卓越的结果。以下我们将对该方法加以说明。
确定工具中心点
我们使用运动学校准方法来确定工具中心点(TCP),所有机器人定位都是以该点为基准加以定义。TCP定义在世界坐标系下 – 可对世界上的任何一点进行定位的笛卡尔坐标系统。该坐标系统相对于所述机器人将始终保持静止。
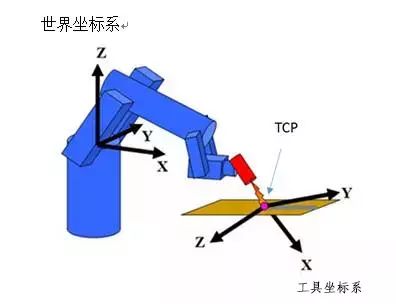
工具坐标系定义了工具的位置和姿态,并且将坐标的零点设在工具的中心点(TCP)。机器人的TCP将会随着其执行笛卡尔运动而移动到已编程位置。更换工具将会改变工具的坐标系,因此需要重新校准,以便使新的TCP准确到达目标位置。
在许多机器人应用当中,TCP的运动轨迹意味着机器人工作空间内的复杂路径,通常为一条变姿态的工具直线路径。此工具本身需要偶尔更换,甚至需要频繁更换。每次更换工具时,在机器人恢复操作之前,必须确定并配置一组新的几何参数。
在大多数工业应用当中,对于机器人任务编程来说,位置示教是最实用的方法。使用这种方法时,必须具备高精度的工具参数(通常来自制造商),包括工具的角偏移(偏航,俯仰和翻滚)以及笛卡尔偏移,以便生成具有可控的工具姿态的直线路径。
但不幸的是,操作者经常会发现工具的几何参数识别会受到某些制约,比如说:(1)没有来自制造商关于工具尺寸的资料;(2)没有可用的硬件协助;(3)无法得知如何将工具安装到机器人法兰。在面临这些限制时,每次更换工具,操作者都必须浪费大量时间去校准工具。
精确评估简化标定
Servotronix已经开发出一种方法,用于快速和精确地估算工具几何参数,无需外部传感器、视觉或其他协助,也无需拆卸工具。在这种位置示教方法当中,操作者只需将6自由度机器人的TCP放在几个不同的位姿,然后自动输入Servotronix的工具尺寸评估算法。该算法可以快速确定新工具的精确校准参数,从而使工具快速投入使用。
这种校准方法的精度将会随着工具位姿样本的增加而提高。我们的实验表明,使用逆齐次转换矩阵未必能够生成期望的结果,但使用最小二乘法将可产生精确的校准值。
Servotronix的方法
我们使用一个配有工具的6自由度机器人,六个Servotronix高性能CDHD伺服驱动器,以及Servotronix softMC控制器进行测试。我们的方法只涉及分析计算而无需拆卸工具。我们只评估XYZ尺寸,并且假设工具的端点处于恒定的笛卡尔坐标位置。
不证自明的是,所有指向同一位置的机器人姿态必须位于一个球体上,并且工具端点位于球体中心:
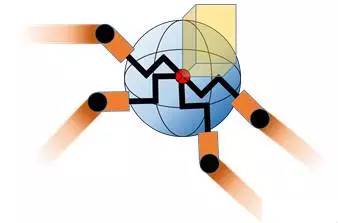
通过对球体上的点进行测量,即可计算TCP。
通过使用方程减法,我们不仅可以消除未知变量R,并且可以清除方程中的所有非线性组分。这将会生成一组1次多项式方程,可以通过最小二乘法拟合进行求解。如果采用的点多于4个,将会产生更多的方程和更高的精度。
这种按部就班的方法仅需几分钟时间即可完成,共需进行至少四次测量,如下所示:
总 结
Servotronix的方法快速、准确、经济,可以无需拆卸工具进行校准。该方法无需专用硬件,可以节省新工具安装所需的时间和精力。机器制造商可以很方便地使用这种方法,对6自由度机器人的工具进行快速、精确和几乎无成本的再校准,从而增强机器人在广泛应用中的操作平稳性,加快生产速度。
审核编辑:汤梓红
-
求教关于双足步行四自由度机器人走直线问题2014-08-15 0
-
工业机器人的基本结构2015-01-19 0
-
什么是工业机器人2015-01-19 0
-
工业机器人经典好书籍——《工业机器人》2015-02-03 0
-
如何系统性地学习工业机器人技术?2016-03-06 0
-
六轴工业机器人控制方式2017-08-09 0
-
机器人的主要技术参数2017-08-15 0
-
【HarmonyOS HiSpark AI Camera】渔业卫士-基于图像识别的多自由度水下机器人2020-09-25 0
-
桁架机器人的概念与特点都有哪些?2020-11-30 0
-
工业机器人与视觉实训平台介绍2021-07-01 0
-
工业机器人与智能视觉系统应用实训平台介绍2021-07-01 0
-
ZN-1AI工业机器人与智能视觉系统应用实训平台介绍2021-07-01 0
-
工业机器人应用编程考核设备分享2021-07-01 0
-
基于Matlab的开源六自由度协作机器人实验平台2021-09-07 0
-
浅谈工业机器人自由度2023-03-16 1900
全部0条评论

快来发表一下你的评论吧 !
