

上位机控制机器人程序复位写法
机器人
519人已加入
描述
正文
1. WorkVisual连接
打开WorkVisual,进入编程与诊断,连接机器人,读取程序;
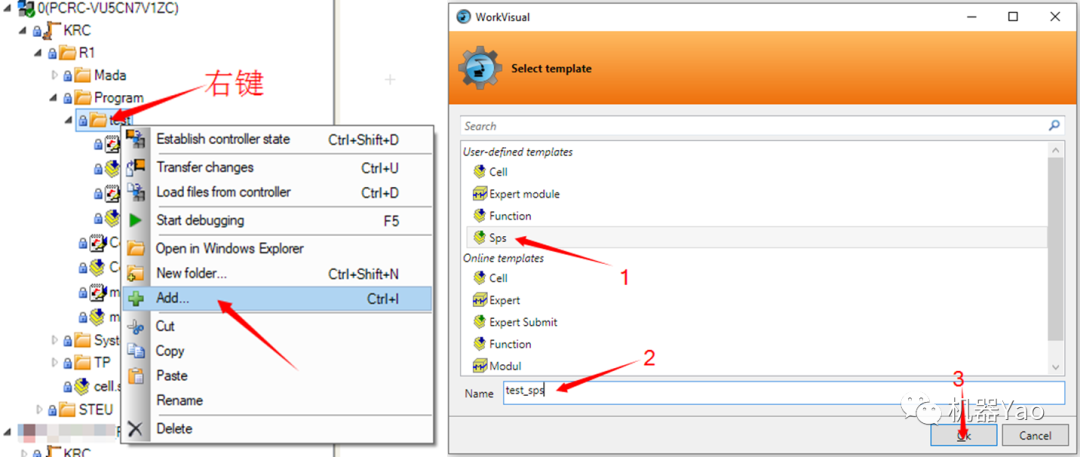
2. 新建后台程序
(1)右键对应文件夹,点击Add,新建Sps文件,输入名称(英文开头),点击OK;
3. 修改后台程序
(1)双击打开程序;
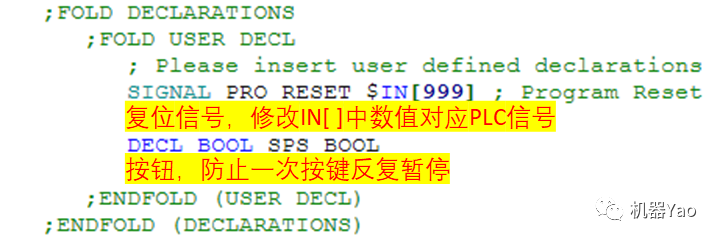
(2)在图示位置(声明)输入,语句需要修改$IN[ ]中的内容:
SIGNAL PRO_RESET $IN[999] ; Program Reset
DECL BOOL SPS_BOOL
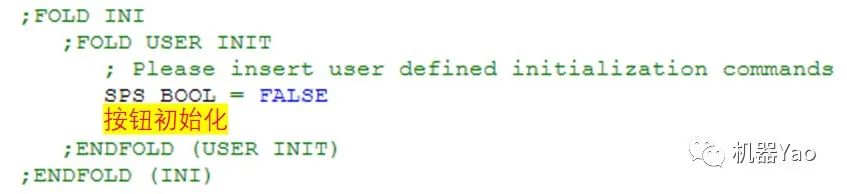
(3)在图示位置(初始化)输入:
SPS_BOOL = FALSE
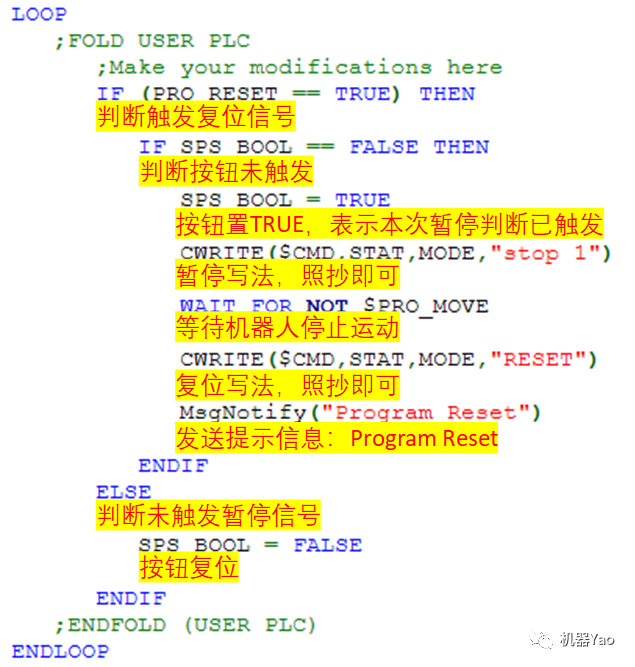
(4)在图示位置(循环)输入:
程序解释:当PLC输入复位信号时,会触发IF条件,判断按钮状态;
若未触发过按钮,则会将按钮赋值为TRUE(防止暂停反复触发),触发暂停,等待机器人停止运动,触发程序复位;
复位后发送信息Program Reset;
当暂停信号未收到时,会将按钮置为FALSE;
注:若不是新建sub文件,而是 在System/sps.sub中使用此程序 ,必须删除 WAIT FOR NOT **PRO_MOVE和MsgNotify("Program Reset", "UserSPS"),可以用IF NOT **PRO_MOVE来判断是否发送信息!!!
IF (PRO_RESET == TRUE) THEN
IF SPS_BOOL == FALSE THEN
SPS_BOOL = TRUE
CWRITE($CMD,STAT,MODE,"stop 1")
WAIT FOR NOT $PRO_MOVE
CWRITE($CMD,STAT,MODE,"RESET")
MsgNotify("Program Reset")
ENDIF
ELSE
SPS_BOOL = FALSE
ENDIF
4. 将改动传送到控制柜
5. 设置后台程序启动
(1)登录管理员权限;
(2)点击S/显示分配;
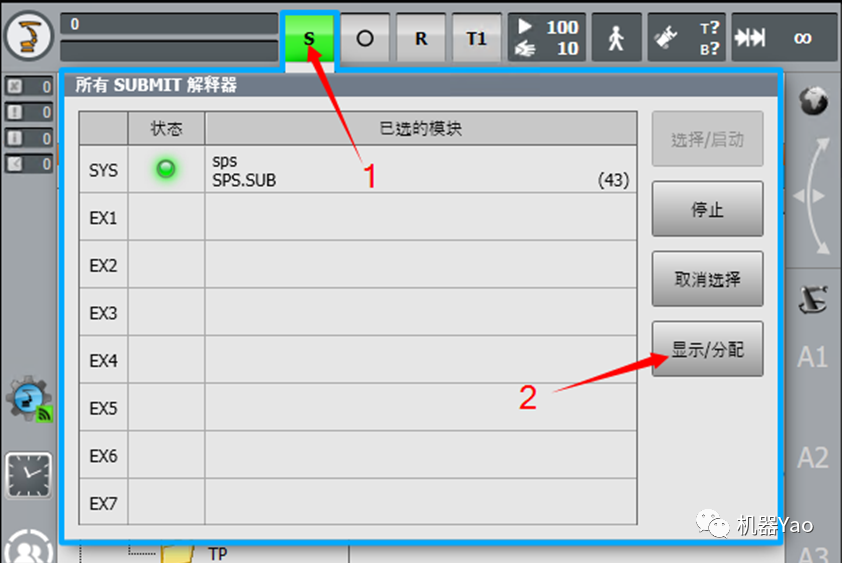
(3)点击EX1/程序名/选择启动,打开后台程序;
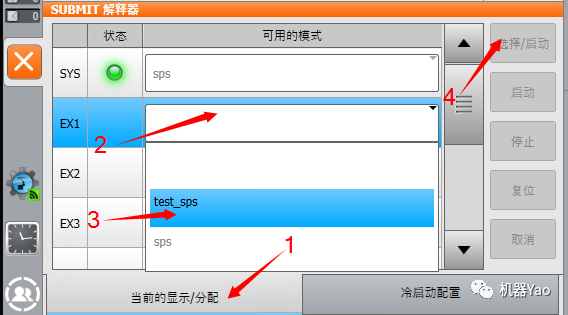
(4)点击冷启动配置/EX1/程序名,设置开机自动启动;

(5)关闭SUBMIT解释器配置;
(6)上位机发送 $IN[ ] 就可以对机器人进行复位操作。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人labview上位机程序2014-03-21 0
-
机器人调试舵机复位2014-07-17 0
-
什么是工业机器人2015-01-19 0
-
关节机器人控制2015-04-29 0
-
可视化机器人2016-07-31 0
-
如何打造一款服务型机器人2017-08-11 0
-
先进机器人控制2017-09-19 0
-
工业机器人的技术原理2018-11-23 0
-
智能救援机器人的功能和作用2020-11-30 0
-
上位机全套程序,上位机与机器人和PLC通讯都是通过以太网总线方式2021-07-01 0
-
上位机与机器人和PLC都是如何进行通讯的2021-09-01 0
-
机器人的控制系统2021-09-13 0
-
如何搭建实体机器人ros底盘2022-01-20 0
-
机器人是什么?2022-03-31 0
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 0
全部0条评论

快来发表一下你的评论吧 !
