

永磁同步电机流频比I/F控制原理及Matlab/Simulink仿真分析
描述
前言
本章节采用流频比I/F控制方法驱动永磁同步电机的转动,首先分析流频比I/F的控制原理,然后在Matlab/Simulink中进行永磁同步电机流频比I/F控制系统的仿真分析,为后续PMSM无感启动做铺垫。
一、流频比I/F控制原理
PMSM的恒压频比V/F控制是保持电机的电压和频率之比固定,即磁通为常数,既不需要转速闭环控制,也不需要进行电流采样,是一种完全的开环控制方式。V/F控制有两个明显的不足:不具备负载转矩匹配能力,转速容易产生振荡;最佳V/F曲线的整定比较困难,容易引起电机过电流。
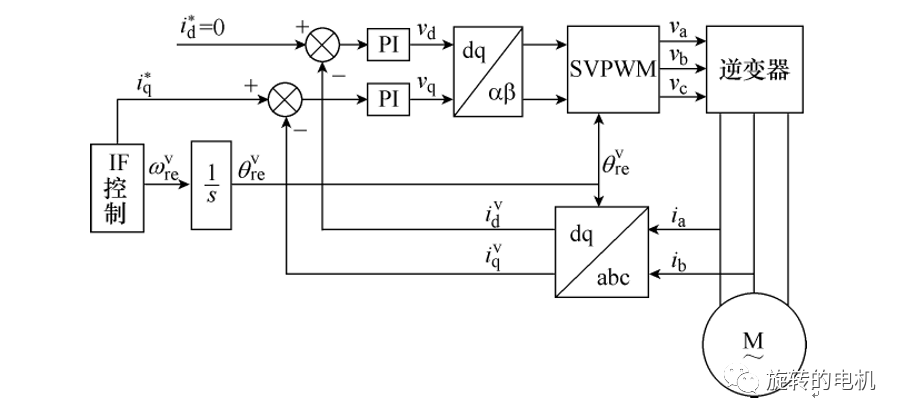
相比于恒压频比V/F控制,流频比I/F控制是一种转速开环,电流闭环的控制方式,其无需保持电流幅值和频率的比值恒定,可依据负载转矩选择合适的电流幅值。I/F控制可以直接控制定子绕组电流幅值,因此这种控制方式不会出现电机过电流现象;通过控制定子绕组电流,使电机具有较好的负载转矩匹配能力,并且依靠“转矩-功角自平衡”特性,电机具备较强的抗负载扰动能力。I/F控制框图如下所示
二、永磁同步电机I/F控制系统Matlab/Simulink仿真分析
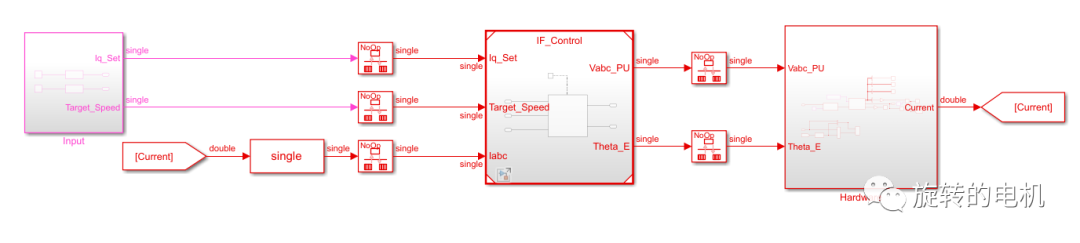
上图为PMSM流频比I/F整体控制框图,为了后续算法模型生成代码加载到底层工程进行工程实现,本示例将I/F控制算法部分单独建立模型,通过调用I/F控制算法模型进行PMSM的流频比I/F控制。
2.1.仿真电路分析
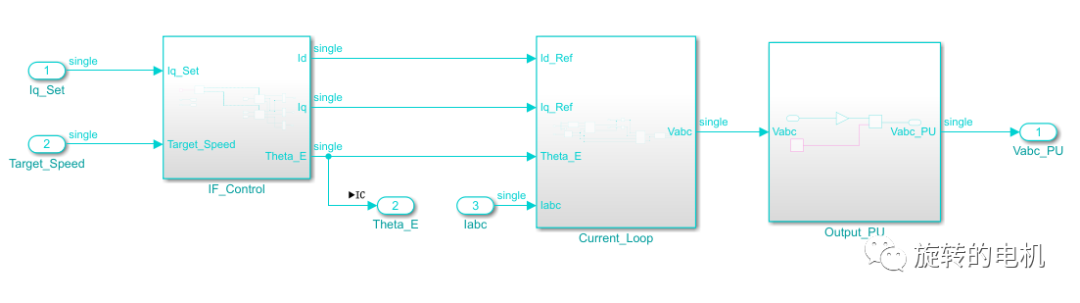
2.1.1 I/F控制
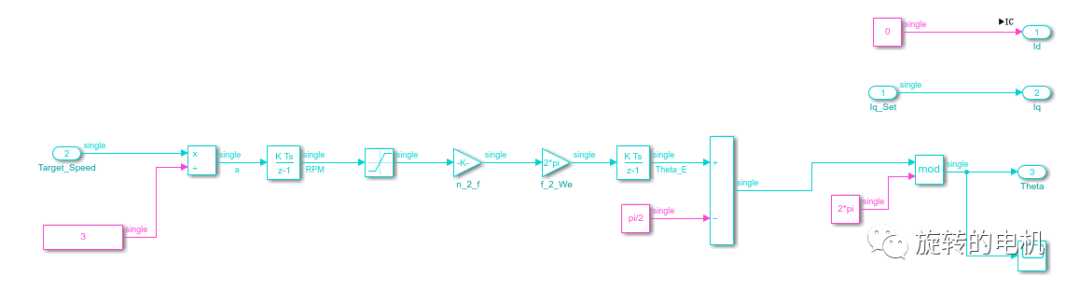
IF控制算法如上图所示,Id_Ref设置为0,Iq_Set设置为电机额定电流1.2A,位置角通过如下生成:
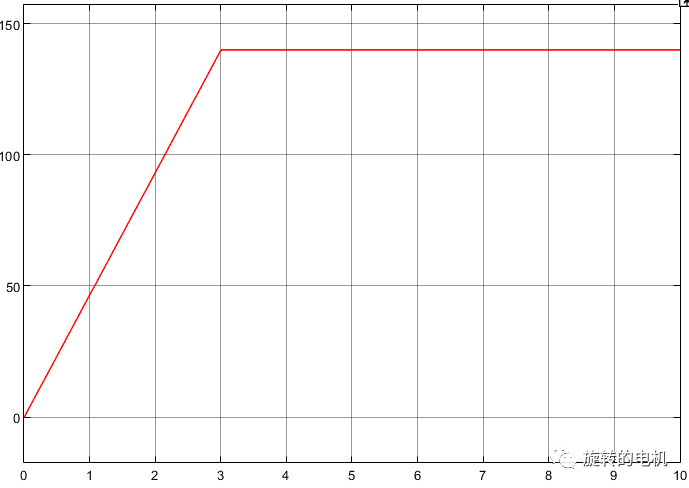
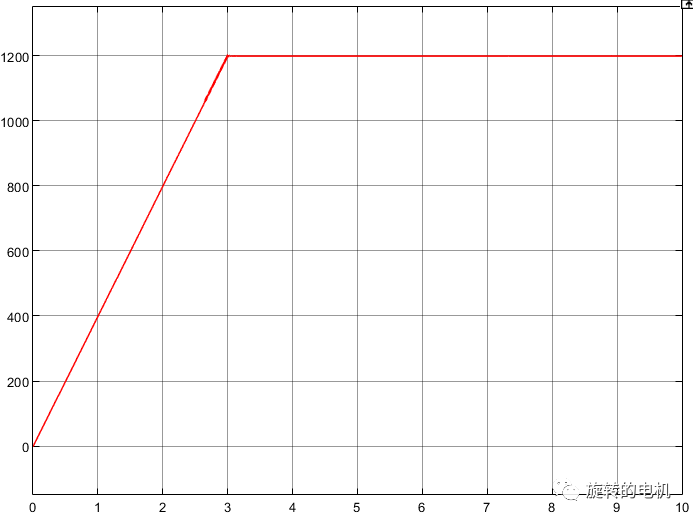
目标速度除以时间得到加速度。此示例加速度设置为1200/3=400,即3s的时间速度由0加速为1200。
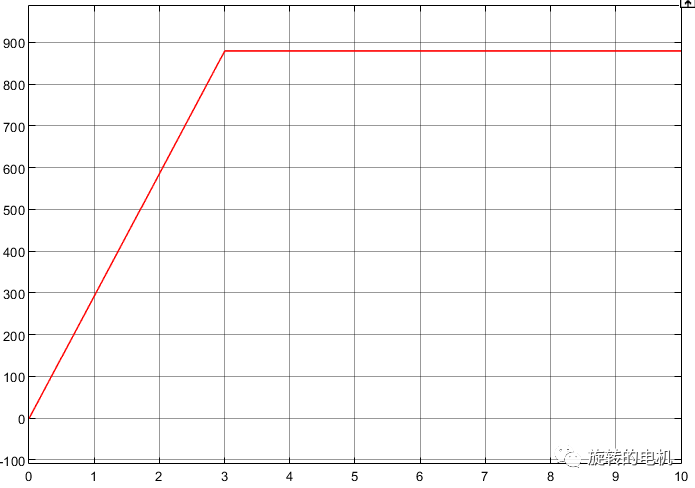
对加速度求积分得到速度,再通过下式将速度换算为角频率。

再通过 we=2pif 将角频率换算为角速度。
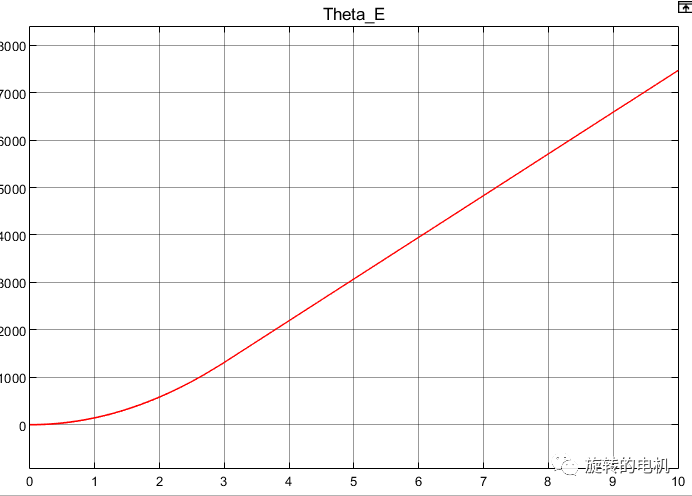
对角速度求积分得到电角度。
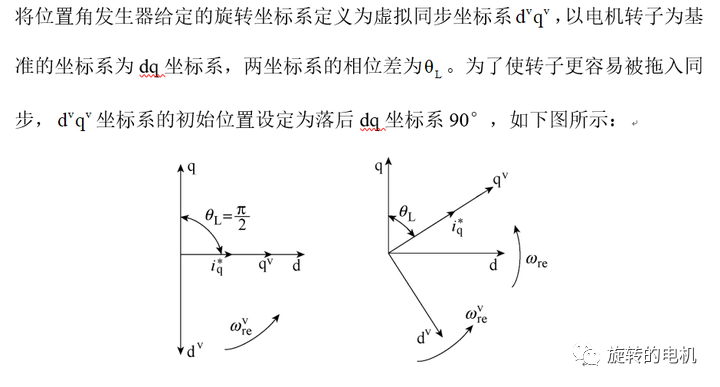
将电角度减去pi/2,使给定的虚拟同步dvqv坐标系初始位置滞后实际的基准dq坐标系90°。
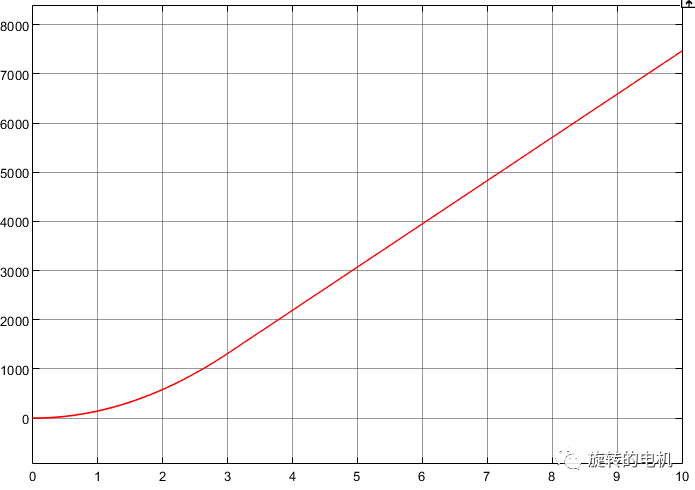
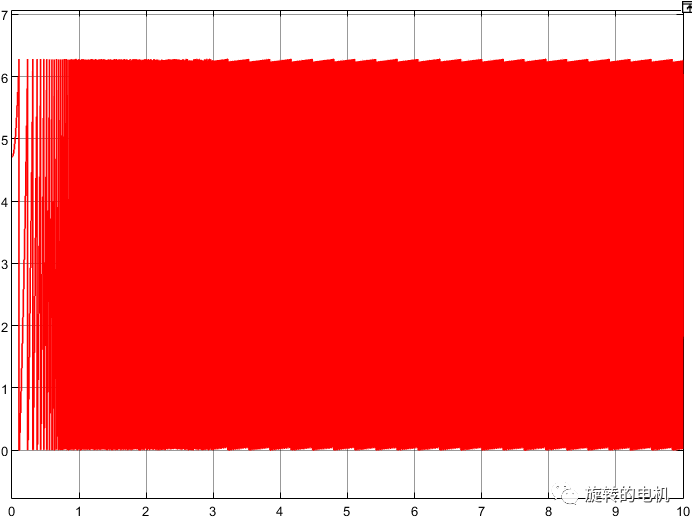
通过mod函数将电角度换算到0~2*pi之间。
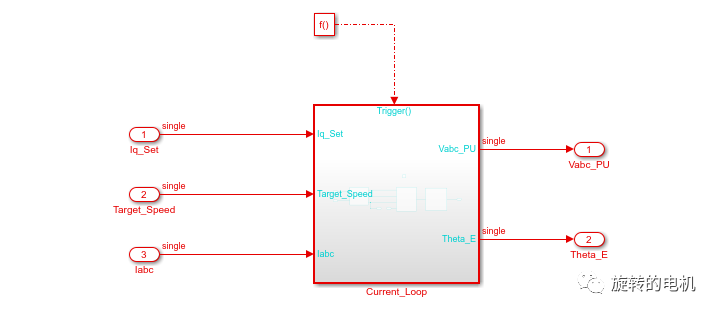
2.1.2 FOC电流环控制
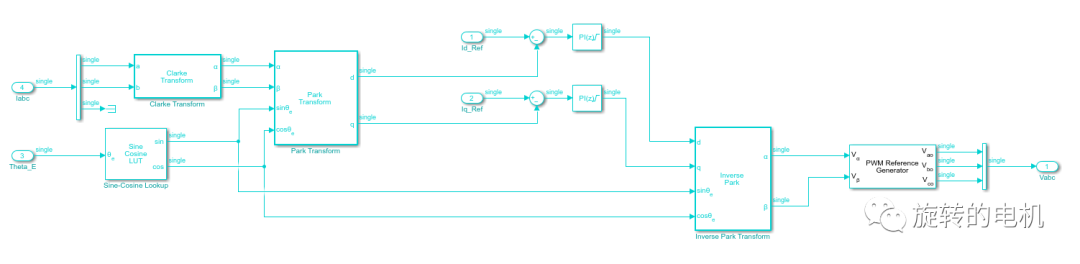
上图为PMSM电流闭环控制。
2.1.3 输出处理
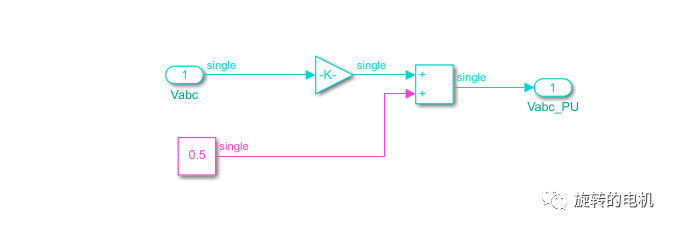
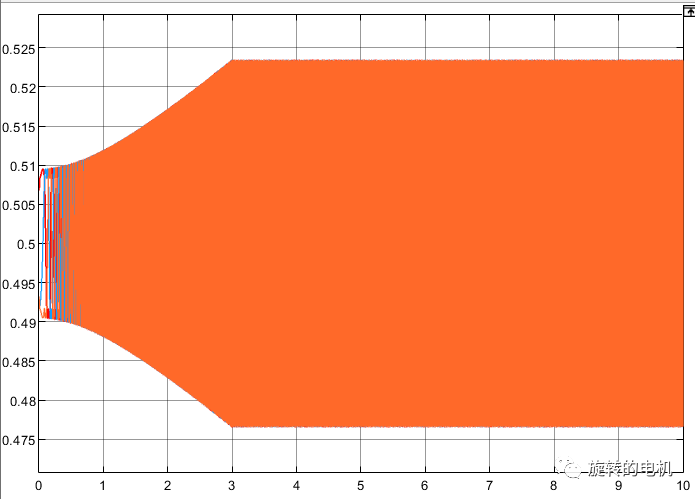
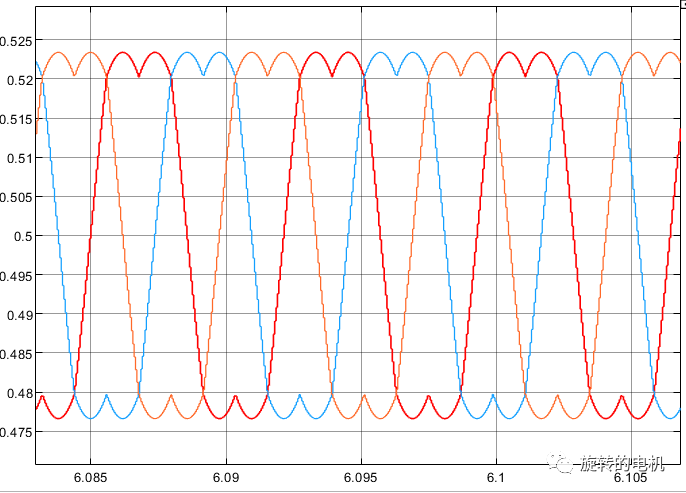
对SVPWM控制算法的输出波形做归一化处理,使其落在[0,1]的范围内:
2.1.4 主电路
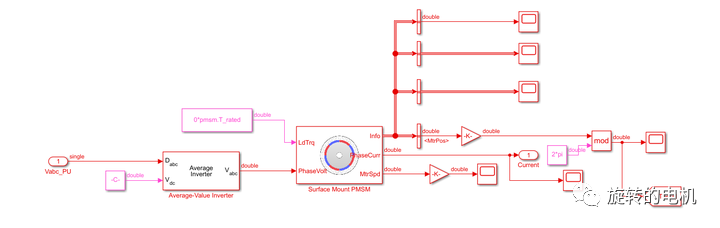
2.2 仿真结果分析
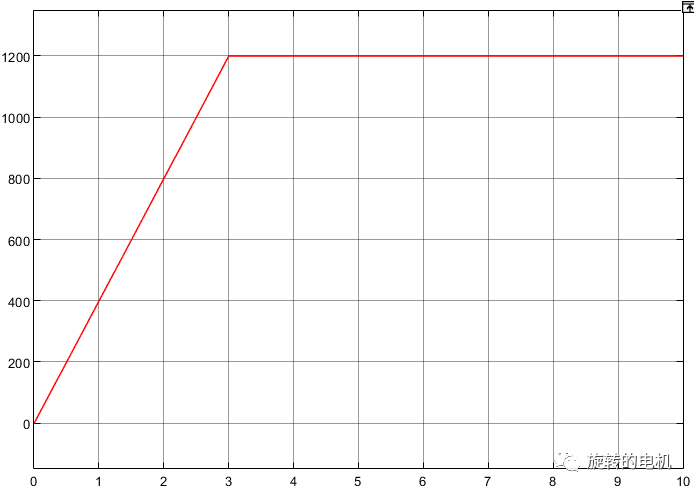
电机转速:3s后达到设定的目标转速1200RPM
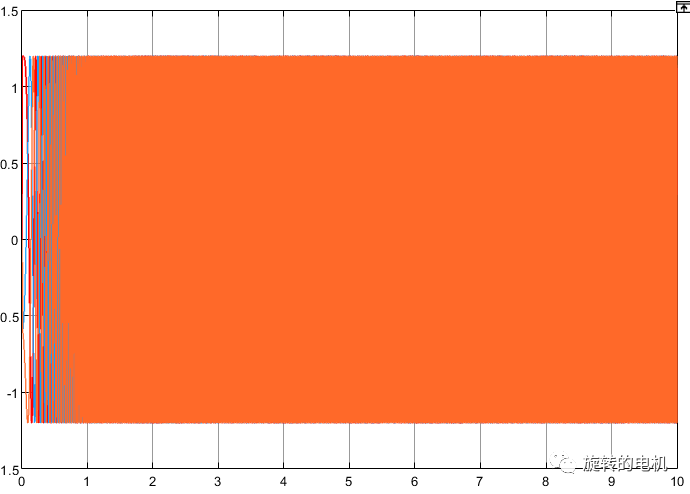
电机定子电流:电流幅值为设定的给定值1.2A
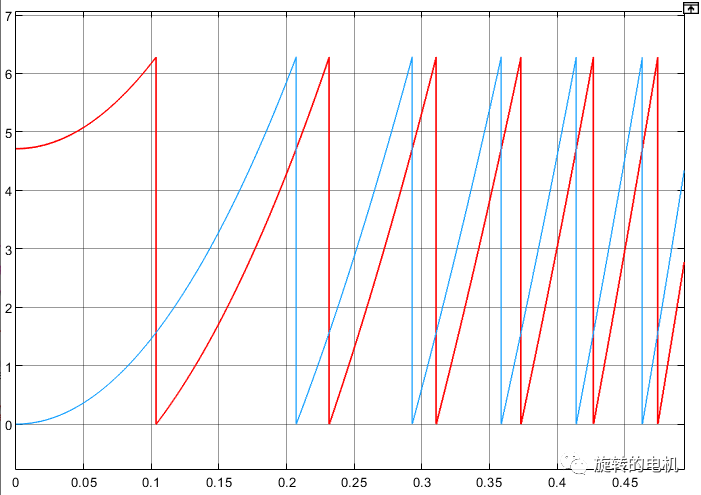
电机转子位置与给定位置:两坐标系的初始位置差为90°
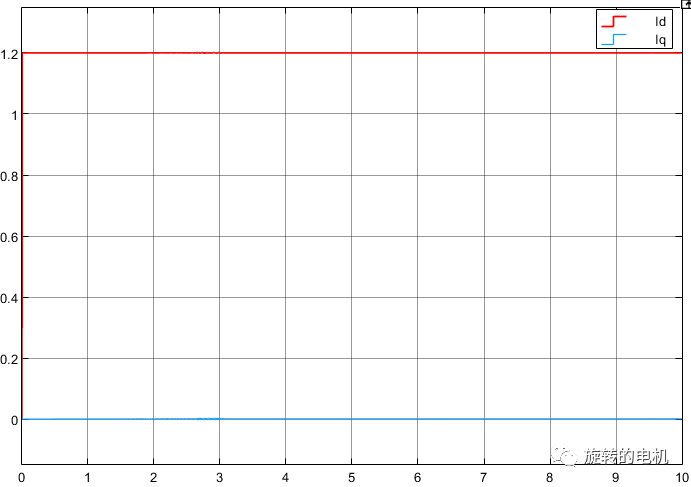
同步旋转坐标系下的定子电流Id、Iq:
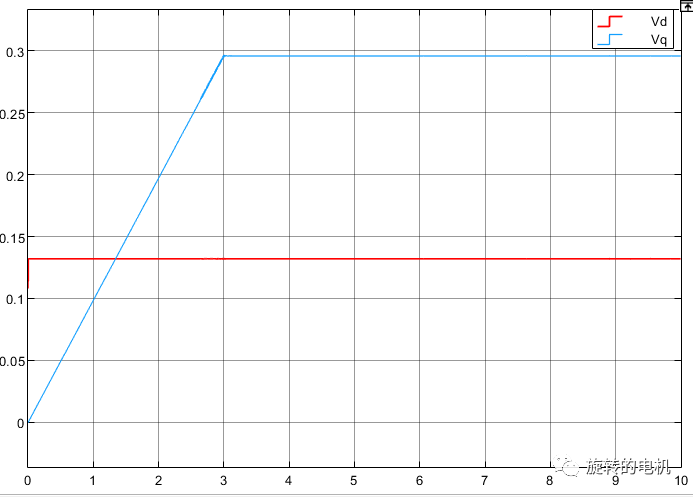
同步旋转坐标系下的定子电压:
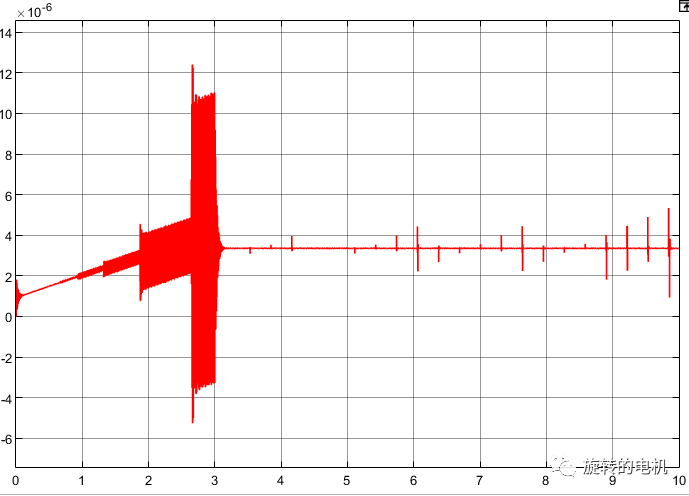
电磁转矩:
总结
本章节采用流频比I/F控制方法驱动永磁同步电机的转动,首先分析了流频比I/F的控制原理,然后在Matlab/Simulink中进行了永磁同步电机流频比I/F控制系统的仿真分析,为后续PMSM无感启动奠定基础。
-
永磁同步电机matlab/simulink建模2015-03-31 0
-
现代永磁同步电机控制原理及MATLAB仿真电子书2018-03-27 0
-
【下载】《现代永磁同步电机控制原理及MATLAB仿真》——同步电机MATLAB仿真与技术分析2019-12-03 0
-
现代永磁同步电机控制原理及MATLAB仿真精选资料分享2021-07-09 0
-
永磁同步电机控制原理分析及MATLAB仿真应用2021-08-27 0
-
Simulink永磁同步电机控制仿真系列2021-08-27 0
-
永磁同步电机控制原理及MATLAB仿真2021-08-27 0
-
如何对永磁同步电机PMSM控制进行Matlab仿真2021-09-29 0
-
基于Matlab-Simuli
nk的永磁同步电机(PMSM)矢量控制仿真 2018-05-05 1566 -
现代永磁同步电机控制原理及MATLAB仿真源码/模型2022-09-05 698
-
永磁同步电机控制笔记:中点平移法svpwm实现分析2023-03-13 429
-
永磁同步电机最小损耗控制Simulink仿真2023-03-14 598
-
永磁同步电机恒压频比开环控制系统Matlab/Simulink仿真分析(一)2023-05-23 2451
-
永磁同步电机FOC控制的基本原理及Matlab/Simulink仿真分析2023-05-23 3188
-
在Matlab/Simulink中进行永磁同步电机流频比I/F控制系统的仿真分析2023-06-08 709
全部0条评论

快来发表一下你的评论吧 !
