

无人机链路系统的组成
描述
链路系统是无人机系统的重要组成部分,其主要任务是建立一个空地双向数据传输通道,用于完成地面控制站对无人机的远距离遥控、遥测和任务信息传输。遥控实现对无人机和任务设备进行远距离操作,遥测实现无人机状态的监测。
任务信息传输则通过下行无线信道向测控站传送由机载任务传感器所获取的视频、图像等信息,是无人机完成任务的关键,质量的好坏直接关系到发现和识别目标的能力。
无人机链路系统组成
无人机链路的机载部分包括机载数据终端(ADT)和天线。机载数据终端包括RF接收机、发射机以及用于连接接收机和发射机到系统其余部分的调制解调器,有些机载数据终端为了满足下行链路的带宽限制,还提供了用于压缩数据的处理器。天线采用全向天线,有时也要求采用具有增益的定向天线。
链路的地面部分也称地面数据终端(GDT)。该终端包括一副或几副天线、RF接收机和发射机以及调制解调器。若传感器数据在传送前经过压缩,则地面数据终端还需采用处理器对数据进行重建。地面数据终端可以分装成几个部分,一般包括一条连接地面天线和地面控制站的本地数据连线 以及地面控制站中的若干处理器和接口。
对于长航时无人机而言,为克服地形阻挡、地球曲率和大气吸收等因素的影响,并延伸链路的作用距离,中继是一种普遍采用的方式。当采用中继通信时,中继平台和相应的转发设备也是无人机链路系统的组成部分之一。无人机和地面站之间的作用距离是由无线电视距所决定的。
无人机链路信道频段
无人机地空数据传输过程中,无线信号会受到地形、地物以及大气等因素的影响,引起电波的反射、散射和绕射,形成多径传播,并且信道会受到各种噪声干扰,造成数据传输质量下降。
在测控通信中,无线传输信道的影响随工作频段的不同而异,因此首先需要了解无人机测控使用的主要频段。无人机测控链路可选用的载波频率范围很宽。低频段设备成本较低,可容纳的频道数和数输速率有限,而高频段设备成本较高,可容纳较多的频道数和较高的数据传输速率。
无人机链路应用的主要频段为微波(300MHz~3000GHz),因为微波链路有更高的可用带宽,可传输视频画面,它所采用的高带宽和高增益天线抗干扰性能良好。不同的微波波段适用于不同的链路类型。
一般来说,VHF,UHF,L和S波段较适合于低成本的短程无人机视距链路;X和Ku波段适用于中程和远程无人机的视距链路和空中中继链路;Ku和Ka波段适用于中远程的卫星中继链路。
如果考虑对无人机(UAV)链路的干扰,则需要考虑干扰对象。无人机有一条从控制站到无人机的控制链路,也叫上行链路;它还有一条从无人机到控制站的数据链路,也叫下行链路。
对控制链路的干扰
控制链路是上行链路,因此干扰机的干扰目标是无人机,干扰场景如下图所示,并给出了一些不失一般性的参数假设:控制站的蝶形天线增益为20dBi,旁瓣隔离度为15dB,发射机功率1W;无人机距离地面站20km,无人机的鞭状天线增益为3dBi。
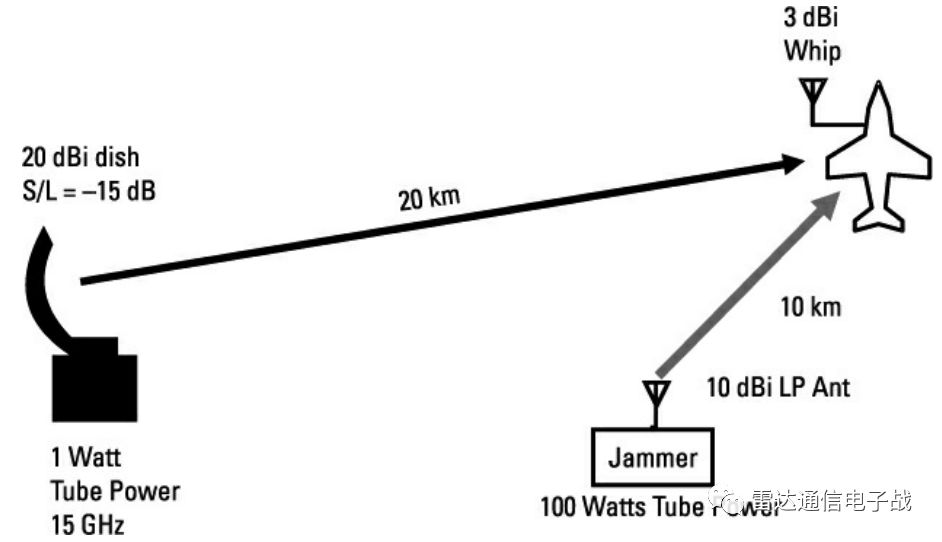
当干扰机指向无人机时,目标接收机接收到的有用信号的ERPs:
30dBm+20dB=50dBm
上行链路损耗:
Ls=32.4+20log(20)+20log(5000)=132.4dB
干扰距离无人机10km,计算出干扰链路损耗:
Lj=32.4+20log(10)+20log(5000)=126.4dB
干扰机的EPRj:50dBm+10dB=60dB
这里假设无人机上的接收天线是鞭状天线,在地面站方向和干扰机方向增益相同,从而可以计算出干信比:
J/S(dB)=ERPj-ERPs-Lj+Ls=16dB
对数据链路的干扰
数据链路也是下行链路,干扰机的干扰目标变为地面站,由于假设地面站采用的是蝶形天线,干扰信号通常从其天线的旁瓣进入,干扰场景如下图:
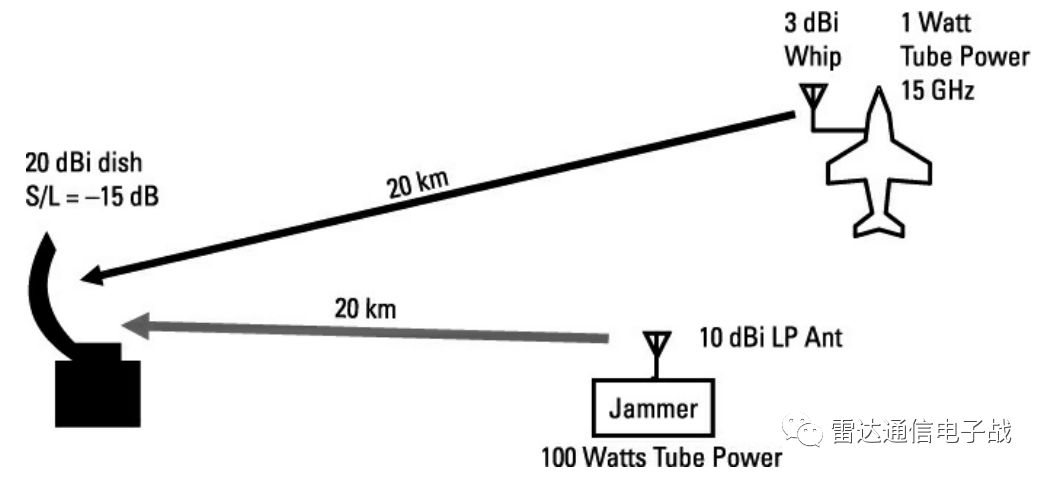
此时,有用信号的ERPs=33dBm,链路损耗为132.4dB;干扰机的ERPj=60dBm,地面站在干扰机方向的增益要比无人机所在的主瓣增益低15dB,因此为20-15=5dBi,计算干信比:
J/S(dB)=ERPj-Lj+Gj-(ERPs-Ls+Gr)=12dB
-
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程2024-03-12 0
-
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理2024-03-12 0
-
小米无人机要PK大疆无人机,你看好吗?2015-09-14 0
-
【AWorks280试用申请】通用多旋翼无人机安全保护系统2015-10-23 0
-
无人机飞手紧缺 看无人机行业发展趋势如何?2016-06-28 0
-
无人机侦测和反制系统2017-04-05 0
-
无人机图传射频链路揭秘2017-04-07 0
-
无人机中的MCU是如何工作的?2018-10-09 0
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 0
-
舰载无人机测控系统关键技术研究2019-07-18 0
-
什么是无人机图传系统?2019-08-09 0
-
无人机的基础常识要知道2020-06-08 0
-
航模/无人机遥控的解决方案2020-07-03 0
-
无人机飞控系统2021-07-21 0
-
小型无人机无线遥控系统的实现2008-12-05 1080
全部0条评论

快来发表一下你的评论吧 !
