

光学三维形貌测量概述
描述
技术背景
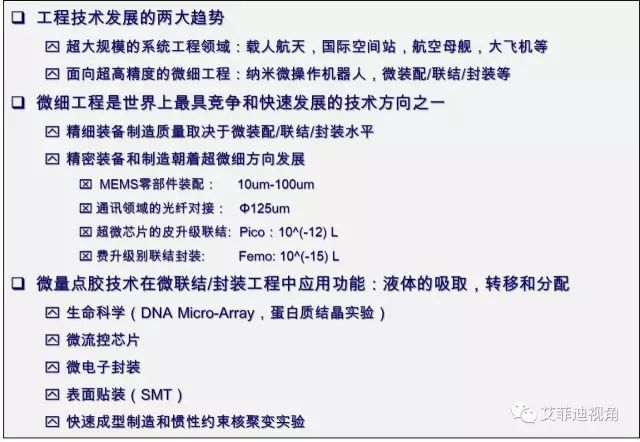
物体三维形貌提供丰富直观的信息,在现代工业与生活中许多领域有广泛的应用。的非接触三维测量有着广泛的应用。经典的外观几何测量诸如长度,角度,平面度,直线度等的测量技术一般采用接触式测试(比如三次元测量等设备)。随着产业工业发展,产品复杂程度加大,特别是复杂物体外形数据的精确获取,包括不规则自由曲面,,对传统的接触式测量提出了挑战。另外,从工业技术发展的趋势来看,一是超大规模的系统工程领域:载人航天,国际空间站,航空母舰,大飞机等;二是面向超高精度的微细工程:纳米微操作机器人,微装配/联结/封装等,其中微细工程是世界上最具竞争和快速发展的技术方向之一。
近年来,随着工业4.0概念的推动,快速,实时获取目标物外观形貌的技术得到迅速发展,电子,光学,计算机技术的日趋成熟,以及人们在图像处理,模式识别,人工智能技术领取取得了巨大成就。以工业化的CCD摄像为基础的非接触式三维轮廓测量成为研究重点。基于光学方法基础上的三维测量技术具有无损,全场,快速,高分辨率和易于实现智能自动化的特点。
光学三维形貌测量概述
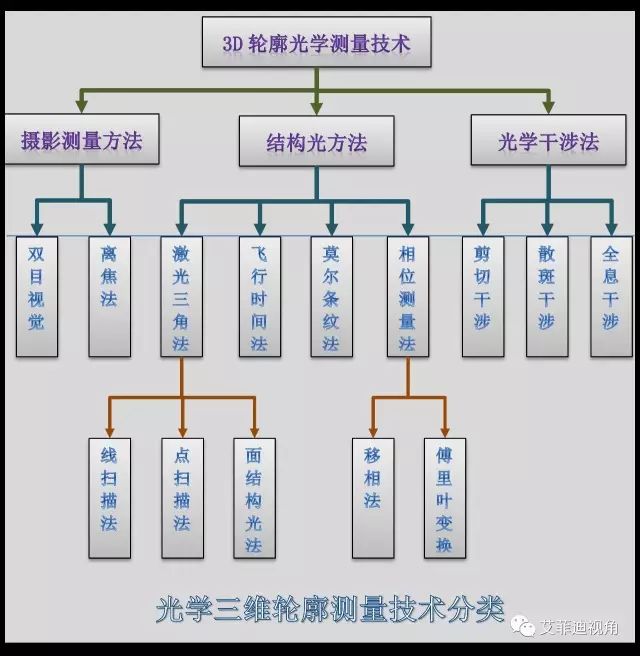
光学三维形貌测量时光学信息科学的主要研究领域,是目前工程应用最有发展前途的测量方法。因为其非接触和全创测量的特点,在精密计量,机械制造,质量控制,生物医学,人体测量和文物考古等方面得到广泛应用。光学形貌测量是现代光学为基础,融合电子学,计算机图像处理,图形学,信号处理等科学技术的应用技术,把通过被测目标调解后的光学图像作为检测和信息载体加以使用,从图像中提取被测目标表面信息的一种方法,根据测量基本原理和实施方法可以分为摄影测量方法,结构光法,光学干涉方法。
摄影测量法(Photogrammetry)-双目视觉法
摄影测量是基于多个视觉几何级数的被动测量方法,在自然光照明情况下,从多个视角获取物体图像,然后根据获取的图像与摄像镜头角度的匹配,从而还原物体的三维结构形貌。
其中,双目立体视觉法使用比较普遍。使用两台摄像机从设定角度对同一物体完成摄像,获取两幅图像并调解出两幅图像中的对应特征点,根据三点同线原则,组立求解共线方程组完成图像坐标到空间坐标的转换从而实现三维形貌的确定。
该方法主要应用在军事,地貌等测量环境,为解决测点图像和视角的同态匹配问题,一般在被测物体表面放置标定点,从而精确标定算法,然后使用插值算法实现被测三维形貌恢复。
缺点:该方法测量精度一般比较低,数据运算量打,不适合精密测量,一般使用与目标识别,定位,以及位姿分析。
优点:类似于人类的眼睛体视功能,测量范围大,测量系统结构简单,数据采集快捷方便,不受物体颜色影响,在计算机视觉和自动识别系统领域有广阔的应用背景
结构光法(Structured Light Method)-三角激光法
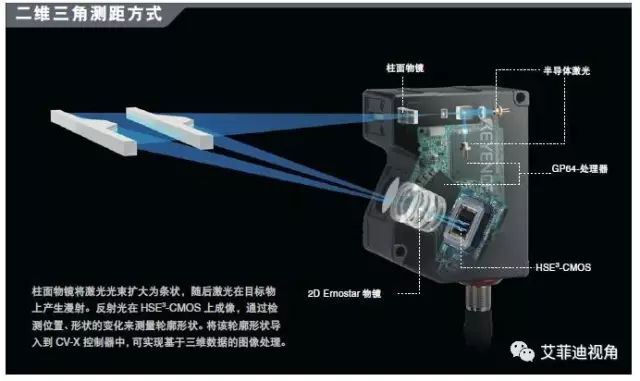
直接三角法包括激光三角法,光切法和全场结构光法。主要原理是利用光学中的著名的三角关系来实现物体高度的测量,目前该技术比较成熟。比如日本Keyence公司的光学测量器件主要采用三角法技术。目前大多数三维形貌测量技术都衍生于三角法测量技术。
根据扫描方式不同,包括点扫描激光三角法和线扫描技术,前者是目前较成熟的测量形貌和高度方法,典型的测量范围在5mm到25mm,精度为万分之一,测量频率40KHz。一般用线性CCD或PSD记录光斑位置,光斑位置的移动和物面高度相关,其尺寸大小及杂散光影响测量精度。三角测量法一般采用激光作为光源,测量范围比较大,并能抑制噪声。光切法是用线结构光代替单点结构光,实现表面的快速测量扫描。
激光三角法和光切法具有测量精度高,算法简洁等优点,用于工业领域,并替代三坐标测量设备中的接触式扫描探头,实现物面三维形貌测量,缺点是单次测量获取信息量小并且需要精密的扫描机构,测绘效率不高。为进一步提高测量速度和效率,现阶段研究者提出利用面结构光投影代替点线结构光来实现物体形貌的全场测量。
结构光法(Structured Light Method)-莫尔条纹法
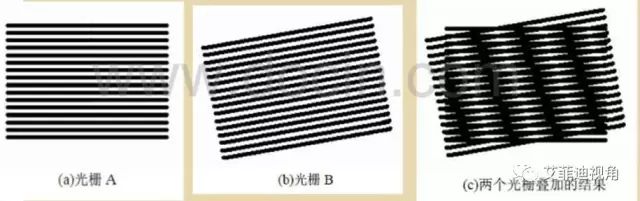
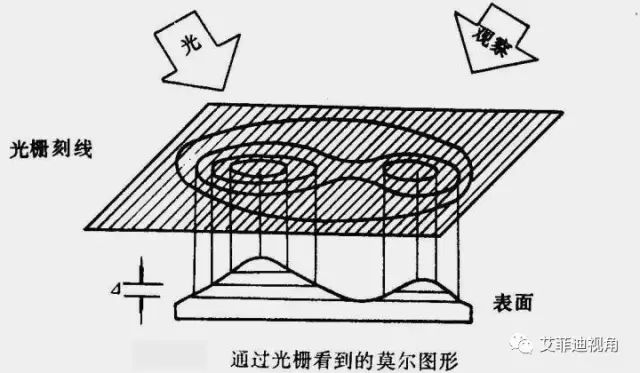
所谓莫尔条纹指的是以透射光栅为例,当指示光栅上的线纹和标尺光栅上的线纹之间形成一个小角度θ,并且两个光栅尺刻面相对平行放置时,在光源的照射下,位于几乎垂直的栅纹上,形成明暗相间的条纹。这种条纹称为“莫尔条纹”。严格地说,莫尔条纹排列的方向是与两片光栅线纹夹角的平分线相垂直。莫尔条纹中两条亮纹或两条暗纹之间的距离称为莫尔条纹的宽度
莫尔条纹轮廓测量法是上世纪70年代提出并发展起来的一种技术,基本原理是利用基准光栅与投影到三维物体表面上并受表面高度调制后的变形光栅重叠形成莫尔条纹,对莫尔条纹进行分析,从而得到三维表面轮廓的深度信息。其应用技术包括影像莫尔法,投影莫尔法,扫描莫尔法等几种。为了使得莫尔条纹法应用于自动化测量,在系统中添加一机构,使得一块基准光栅垂直于光栅线方向做微小移动,根据莫尔条纹同步移动的方向来自动判断表面的凹凸。扫描式莫尔法则是使用电子扫描光栅和变形光栅像叠加生成莫尔登高线。利用现代电子技术,方便地改变扫描光栅珊距,相位,生成不同相位的莫尔等高线,实现大范围测试。
目前莫尔轮廓测量主要用于工业检测,人体轮廓检测等,由于莫尔条纹轮廓法灵敏度不够高,还不能满足工业上的一些高精度测量要求,主要用在人体轮廓检测,包括骨科,胸外科和整形外科方面。
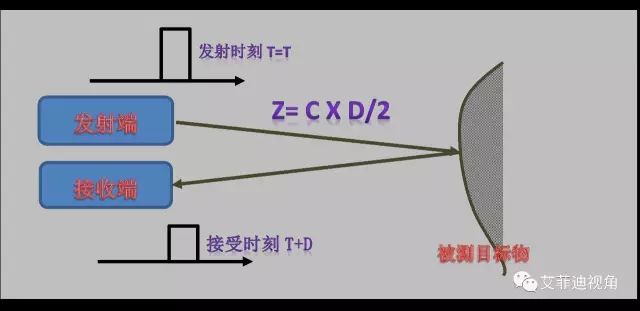
结构光法(Structured Light Method)-飞行时间法
结构光技术指的是利用具有特定几何特性的结构光源照明物体,物体表面的轮廓特性对结构光产生调制特性,通过检测到的调制光辨识出物体表面轮廓特性。根据所用结构光和测量原理区别分为时间调制和空间调制两大类,其中飞行时间法是基于时间调制的方法
飞行时间法是利用光束在空间传播时间进行测量,一个激光脉冲信号从发射端出发,经过物体表面漫反射后,几乎沿着完全相同的路径返回到接收端。检测光脉冲从发射到接收之间的时间延迟,可以计算出被测物体表面到光脉冲发射端的距离。
结构光法(Structured Light Method)-相位测量法
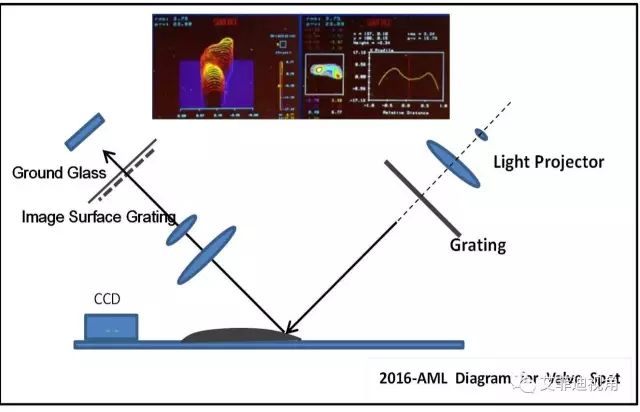
相位测量法是利用光栅投影并通过图像分析得到精确测量的技术。通过相位测量,可以提高测量分辨率并对图像信息深度挖据。相位测量是结构光技术和光学干涉测量相结合产生的测量方法。通过建立物体表面高度和投影到物体表面条纹相位的关系而获得物体表面的三维信息。基于相位法的条纹投影三维系统结构简单,并且具有全场高精度测量特点,成为目前最具潜力的三维形貌测量技术。
相位测量结构功能主要包括条纹投影实现,条纹相位的获取,和相位高度关系定义三个部分,其中条纹相位计算的准确性直接影响后续测量的高度计算。
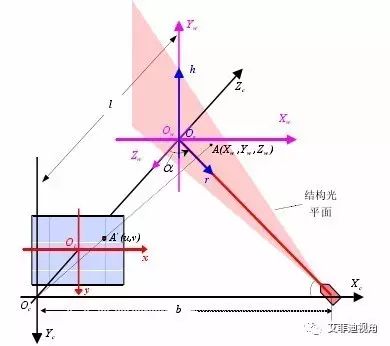
相位测量轮廓技术的原理
DO:投影光轴; CO:探测光轴
DC=d:轴间距,与平面平行
光轴到目标点E投影本来应该投影与B点, 由于被测表面形貌调制,在CCD成像在A点,AB=S(x,y)
H(x,y)=LS(x,y)/(d+S(x,y)
正玄光栅投影到待测物体表面,规定坐标原点O系统相位为零。采用4步相移技术(每步90度,利用CCD摄像获得4幅畸变光栅条纹图光强,利用光强关系计算E点相位,在利用光栅直接投影到参考面(XY平面)的光强关系,得到A点相位。
相位差:

当探测光轴高度L远大于被测面高度,测点高度差为 
根据条纹相位获取方法的不同,相位测量法又分位移相位法和空间相位法。相移动法采用正弦光栅投影,通过获取一个条纹周期内的多幅相移条纹图像,计算物面投影条纹相位分布,从而计算获取物面三维形貌特性。
优点:相移法中测得的物面每一点的相位值只与改点的光强度有关,对物面颜色及反射等引起的强度不均匀不铭感,测量精度高。
缺点:相移法需要采集多幅条纹图像,测试速度慢,因此时间域相移法主要应用在不需要动态实时测量的场合。
空域相位法主要包括空域相移法,傅里叶变换法,盖波变换法等。由于空域相移法只需要一幅或两幅图像就可计算条纹相位,数据量处理下,适合动态测量和实时监控。但不适合用于测量梯度变换较大的场合。
-
基于虚拟仪器的三维测量系统2013-04-28 0
-
ZLDS200 2D传感器扫描得到的测量数据,可以做出三维轮廓坐标图及三维轮廓模拟图吗?2015-12-23 0
-
4D测量来了——革命性创新测量手段,附成果展示2017-11-03 0
-
革命性创新测量技术——数字全息术带来实时3D形貌2017-11-07 0
-
0.001秒测实时3D形貌——探索微纳世界形貌的新手段,基于菲涅尔衍射的重建算法2017-11-16 0
-
三维快速建模技术与三维扫描建模的应用2018-08-07 0
-
广西扫描服务三维检测三维扫描仪2018-08-29 0
-
三维设计应用案例2019-07-03 0
-
纳米级测量仪器:窥探微观世界的利器2023-10-11 0
-
不同负荷下足部三维形貌测量系统设计2009-09-15 526
-
光学方法测量三维形状综述2016-01-07 692
-
白光干涉仪测三维形貌2022-06-02 733
-
白光干涉仪测三维形貌怎么测2023-07-21 610
-
显微测量|光学3D表面轮廓仪微纳米三维形貌一键测量2024-02-19 322
全部0条评论

快来发表一下你的评论吧 !
