

总结FasterTransformer Encoder优化技巧
电子说
描述
FasterTransformer BERT
FasterTransformer BERT 包含优化的 BERT 模型、高效的 FasterTransformer 和 INT8 量化推理。
模型结构
标准的 BERT 和 高效的 FasterTransformer
FasterTransformer 编码器支持以下配置。
- Batch size (B1): 批量大小 <= 4096
- Sequence length (S): 序列长度 <= 4096。对于 INT8 模型,当 S > 384 时 S 需要是 32 的倍数。
- Size per head (N): 小于 128 的偶数。
- Head number (H): 在 FP32 下满足 H * N <= 1024 或在 FP16 下满足 H * N <= 2048 的任何数字。
- Data type: FP32, FP16, BF16, INT8 and FP8 (Experimental).
- 如果内存足够,任意层数(N1)
在 FasterTransformer v1.0 中,我们提供了高度优化的 BERT 等效编码器模型。接下来,基于Effective Transformer的思想,我们在 FasterTransformer v2.1 中通过去除无用的 padding 来进一步优化BERT推理,并提供 Effective FasterTransformer。在 FasterTransformer v3.0 中,我们提供了 INT8 量化推理以获得更好的性能。
在 FasterTransformer v3.1 中,我们优化了 INT8 Kernel 以提高 INT8 推理的性能,并将 TensorRT 的多头注意力插件集成到 FasterTransformer 中。在 FasterTransformer v4.0 中,我们添加了多头注意力 Kernel 支持 V100 的 FP16 模式和 T4, A100 的 INT8 模式。下图演示了除 INT8 外的这些优化的流程图。在FasterTransformer v5.0中,我们重构了代码,将 mask building 和 padding 移动到 Bert 的 forward 函数中,并在 Ampere GPU 上基于稀疏特性来加速GEMM。在 FasterTransformer v5.1 中,我们支持对 Bert FP16 进行进行多节点多 GPU 推理。
BERT 模型是 google 在2018年提出的。FasterTransformer 的encoder 相当于 BERT 模型,但是做了很多优化。图 1 最左边的流程显示了 FasterTransformer 中的优化。经过优化后,FasterTransformer 仅使用 8 或 6 个 gemms(蓝色块)和 6 个自定义 CUDA kernel(绿色块)来实现一个 transformer 块。
对于 Effective FasterTransformer,主要思想是去除句子的填充以防止计算无用的标记。当一个 Batch 的平均序列长度远小于最大序列长度时,此方法可以节省大量时间。图 2 显示了我们使用的想法和偏移量(橙色)。要实现 Effective FasterTransformer,我们需要考虑两个问题。首先,我们需要去除 BERT 之前的 padding,离开 BERT 之后重建 padding 以保持结果的形状。这很简单,带来的开销基本可以忽略。第二个问题是多头注意力的计算。一个天真的解决方案是在多头注意力之前重建填充并在多头注意力之后移除填充,如图 1 的第二个流程图所示。因为我们可以将这些重建/移除融合到其他 kernel 中,额外的开销也是可以忽略的。
为了进一步提高多头注意力的性能,我们集成了 TensorRT 的多头注意力,将整个注意力计算融合到一个 kernel 中。源代码在这里。该 kernel 同时支持 Effective FasterTransformer 和标准 BERT 模型。图 1 中的第三个和第四个流程图显示了工作流程。有了这样的 kernel ,我们就不用担心多头注意力的填充问题了。这个 kernel 需要另一个偏移量,如图 2 所示。
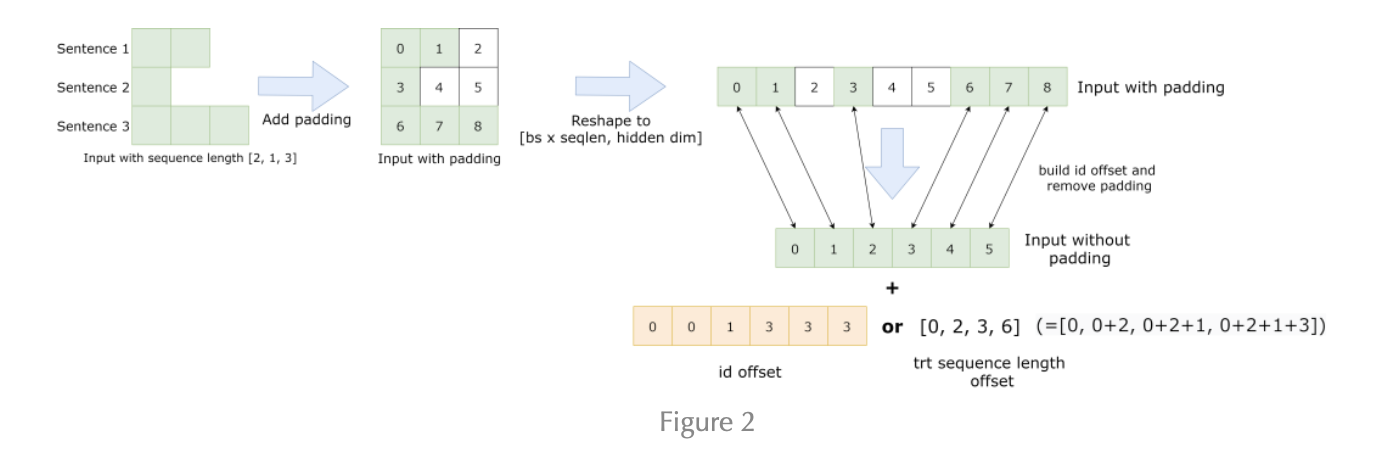
第一个偏移量 [0, 0, 1, 3, 3, 3]比较好理解,直接和[0, 1, 2, 3, 4, 5]迭代就可以得到原始的位置了。第二个偏移量是从0位置开始,记录连续的原始token个数,比如我们将[0, 2, 3, 6]做差分,得到[2, 1, 3]也对应了原始的数据中每行做的padding的tokn数目。
此外,我们发现 padding 会影响某些任务的准确性,尽管它们应该是无用的。因此,我们建议删除下游任务最终输出中的填充。
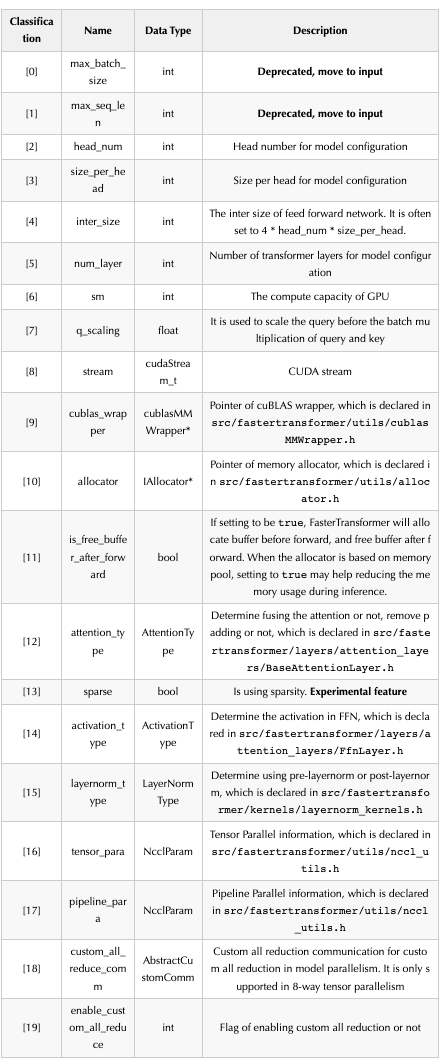
编码器的参数、输入和输出:
-
Constructor of BERT
-
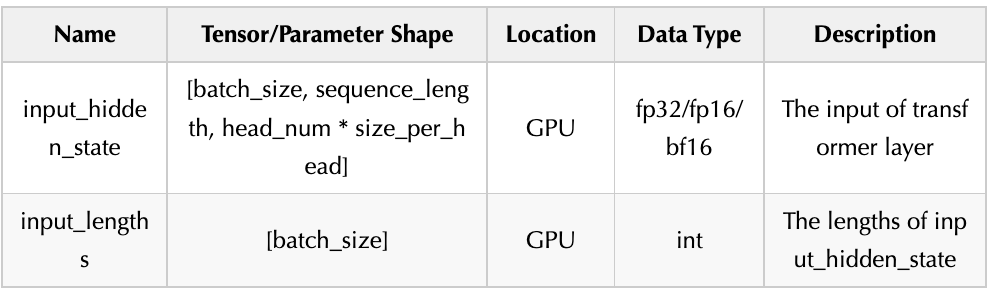
Input of BERT
-
Output of BERT


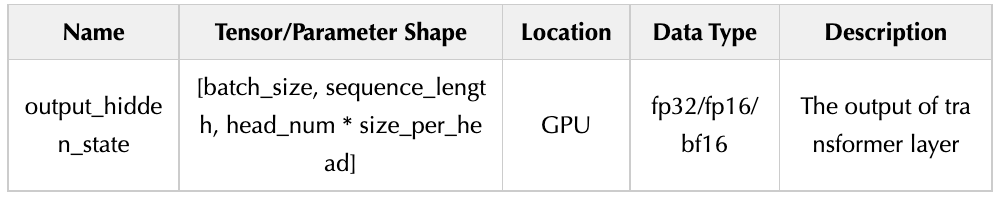
上面声明了 Bert 模型的输入参数,以及输入和输出Tensor的shape。
此外,注意到 TensorRT 的多头注意力Kernel虽然功能很强大但是也有一些限制。首先,这个kernel需要 Turing 或者更新架构的 GPU,并且每个头的大小必须是64。当条件不满足时,我们使用FasterTransformer的原始多头注意力实现。其次,它需要一个额外的序列长度偏移量,如Figure2所示,更多的细节在这里 。当输入有 padding 时,序列长度偏移的形状为 。假设这里有3个序列,长度分别为 , , ,然后 padding 之后的序列长度为 。那么序列长度偏移时 。即,序列长度偏移记录了每个句子的序列长度。当我们有 padding 时,我们将 padding 视为一些独立的句子。
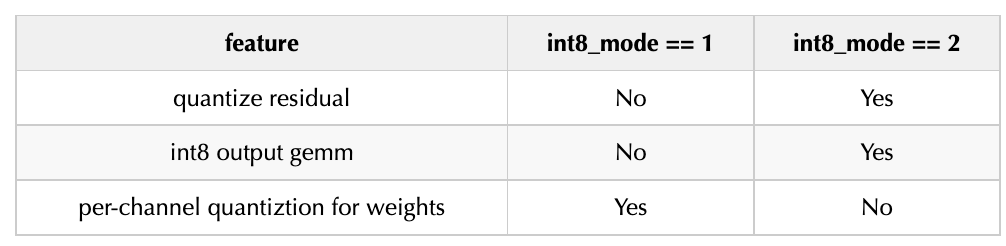
在 FasterTransformer v4.0 中,我们实现了两条 INT8 推理的流水线,如图 3 所示。对于 int8_mode == 1 (int8v1),我们不量化残差连接,使用 int32 作为 int8 gemms 的输出,并对权重采用逐通道的量化方式。对于 int8_mode == 2 (int8v2),我们量化残差连接,使用 int8 作为 int8 gemms 的输出,并对权重采用逐张量的量化。一般来说,int8_mode == 1 的精度更高,而 int8_mode == 2 的性能更好。
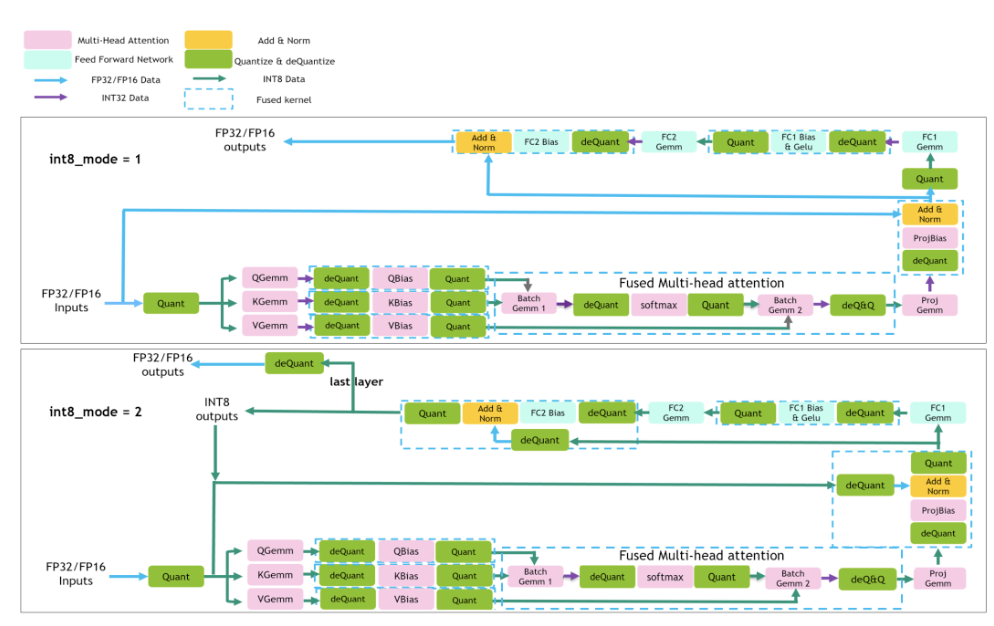
Figure 3
对于 INT8 推理,需要量化模型。我们提供了 TensorFlow 量化工具和示例代码,同时还提供了带有 TensorRT 量化工具的 PyTorch 示例代码。请先参考bert-quantization/bert-tf-quantization和examples/pytorch/bert/bert-quantization-sparsity中的README。
在 FasterTransformer v5.0 中,我们支持稀疏 gemm 以利用 Ampere GPU 的稀疏特性。我们还提供了一个关于 PyTorch 的示例。
在 FasterTransformer v5.1 中,我们支持 BERT 模型的多 GPU 多节点推理。
优化点解读
优化主要是针对 Figure 1 也就是 BERT 的编码器模块的各个组件来讲(我这里忽略了 Figure1 的和 padding 相关的组建的讲解,感兴趣的读者可以自己看看 FasterTransformer)。
import torch.nn as nn
class Attention(nn.Module):
"""
Compute 'Scaled Dot Product Attention
"""
def forward(self, query, key, value, mask=None, dropout=None):
scores = torch.matmul(query, key.transpose(-2, -1)) \\
/ math.sqrt(query.size(-1))
if mask is not None:
scores = scores.masked_fill(mask == 0, -1e9)
p_attn = F.softmax(scores, dim=-1)
if dropout is not None:
p_attn = dropout(p_attn)
return torch.matmul(p_attn, value),
class MultiHeadedAttention(nn.Module):
"""
Take in model size and number of heads.
"""
def __init__(self, h, d_model, dropout=0.1):
super().__init__()
assert d_model % h == 0
# We assume d_v always equals d_k
self.d_k = d_model // h
self.h = h
self.linear_layers = nn.ModuleList([nn.Linear(d_model, d_model) for _ in range(3)])
self.output_linear = nn.Linear(d_model, d_model)
self.attention = Attention()
self.dropout = nn.Dropout(p=dropout)
def forward(self, query, key, value, mask=None):
batch_size = query.size(0)
# 1) Do all the linear projections in batch from d_model => h x d_k
query, key, value = [l(x).view(batch_size, -1, self.h, self.d_k).transpose(1, 2)
for l, x in zip(self.linear_layers, (query, key, value))]
# 2) Apply attention on all the projected vectors in batch.
x, attn = self.attention(query, key, value, mask=mask, dropout=self.dropout)
# 3) "Concat" using a view and apply a final linear.
x = x.transpose(1, 2).contiguous().view(batch_size, -1, self.h * self.d_k)
return self.output_linear(x)
Compute Q, K, V by three GEMMs or one Batch GEMM
add_QKV_bias 优化
这个是针对上面forward函数中 (1) 这部分存在的分别对 Q, K, V进行bias_add以及transpose的优化,将其融合成一个cuda kernel。
对于FP32,FasterTransformer是启动 batch_size *seq_len *3 个 Block, 每个 Block 里面启动 head_num *size_per_head 个线程只处理一个token(对应 head_num *size_per_head 次计算)的 bias_add 计算。我们注意到这里还将输入的shape进行了改变,也就是将原始的[batch_size, seq_length, head_num * size_per_head] -> [batch_size, seq_length, head_num, size_per_head](对应 .view(batch_size, -1, self.h, self.d_k))->[batch_size, head_num, seq_length, size_per_head](对应.transpose(1, 2))。
而对于FP16模式,FasterTransformer是启动 batch_size *seq_len 个 Block,,每个 Block 里面启动 head_num *size_per_head 个线程同时处理QKV的同一个token(对应head_num * size_per_head次计算)并使用了half2相关的数学函数。这样不仅仅可以达到2倍于half的访存带宽和计算吞吐,还可以极大地减少指令的发射数量。
高效的softmax kernel
这里我没有怎么看,因为oneflow已经有一个比FasterTransformer更好的softmax kernel实现了。
transpose kernel
这个 kernel 是对应上面 BERT 的 Encoder 部分的:
x = x.transpose(1, 2).contiguous().view(batch_size, -1, self.h * self.d_k)
这里的 x 的 shape 仍然和之前的 q 的 shape 一致, 为[batch_size, head_num, seq_length, size_per_head]。因为Attetion 层不会改变输入的形状,因为 Attention 的计算过程是:q *k 转置(.transpose(2, 3)),除以 d_k **0.5,输出维度是 [b, head_num , seq_length, seq_length] 即单词和单词直接的相似性 ,然后对最后一个维度进行 softmax 操作得到 [b, head_num, seq_length, seq_length] , 最后和 v(shape 也是 [batch_size, head_num, seq_length, size_per_head]) 做一个矩阵乘法,结果的 shape 和输入的 shape 形状都是:[batch_size, head_num, seq_length, size_per_head] 。因此这里的 x.transpose(1, 2) 就是把 shape 为 [batch_size, head_num, seq_length, size_per_head] 的 x 重新排列为 [batch_size, head_num, size_per_head, seq_length]。然后 x.contiguous().view(batch_size, -1, self.h *self.d_k) 进一步将 shape 重新排列为 [batch_size, seq_length, head_num * size_per_head] 。
对于 FP32 模式,启动 batch_size *head_num *seq_length 个 Block , 然后每个 Block 启动 size_per_head 个线程处理一个序列(一个序列对应 size_per_head 个元素)。如下:
const int seq_per_block = 1; grid.x = batch_size * head_num * seq_len / seq_per_block; block.x = seq_per_block * size_per_head; transpose
而 transpose 的kernel实现也比较简单,根据blockIdx.x计算下batch_id和seq_id以及head_id(输入 x 的 shape 为 [batch_size, head_num, seq_length, size_per_head]):
`template
global
void transpose(T* src, T* dst, const int batch_size, const int seq_len, const int head_num, const int size_per_head)
{
int batch_id = blockIdx.x / (head_num * seq_len);
int seq_id = blockIdx.x % seq_len;
int head_id = (blockIdx.x % (head_num * seq_len))/ seq_len;
dst[batch_id * (head_num * seq_len * size_per_head) + seq_id * head_num * size_per_head
head_id * size_per_head + threadIdx.x] = src[blockIdx.x * size_per_head + threadIdx.x];
}
`
对于 half 来说,采用和 add_QKV_bias 一样的优化方式,每个 block 处理 4 个sequence。具体来说,就是现在启动 batch_size *head_num *seq_len / 4 个 Block, 每个 Block 使用 2 *size_per_head 个线程处理 4 个序列。为什么 2 *size_per_head 个线程可以处理 4 个序列(一个序列对应 size_per_head 个元素),原因是因为使用了 half2 来做数据读取。half 类型的 kernel 实现如下:
` inline device
int target_index(int id1, int id2, int id3, int id4, int dim_1, int dim_2, int dim_3, int dim_4)
{
return id1 * (dim_2 * dim_3 * dim_4) + id3 * (dim_2 * dim_4) + id2 * dim_4 + id4;
}
template<>
global
void transpose(__half* src, __half* dst,
const int batch_size, const int seq_len, const int head_num, const int size_per_head)
{
int tid = blockIdx.x * blockDim.x + threadIdx.x;
int batch_id = tid / (head_num * seq_len * size_per_head);
int head_id = (tid % (head_num * seq_len * size_per_head)) / (seq_len * size_per_head);
int seq_id = (tid % (seq_len * size_per_head)) / size_per_head;
int id = tid % size_per_head;
int target_id = target_index(batch_id, head_id, seq_id, id, batch_size, head_num, seq_len, size_per_head);
half2 * src_ptr = (half2* )src;
half2 * dst_ptr = (half2* )dst;
dst_ptr[target_id] = src_ptr[tid];
}
`
trt_add_QKV_bias 和 TensorRT fused multi-head attention kernel
实际上从 Figure1 也可以看出我们上面讲到的 batch GEMM,softmax, GEMM,transpose 等操作都可以被合成一个超大的 cuda kernel,进一步进行优化,也就是这里的 TensorRT fused multi-head attention kernel。这个是将 TensorRT 的这个插件作为第三方仓库引入到 FasterTransformer 进行加速的,具体的代码我没有研究过,这里就不展开了。
现在 MultiHeadAttention 部分涉及到的优化其实就讲完了,我们接着看一下FasterTransformer 对 BERT Encoder 的其它部分的优化。我们这里贴一下 Transformer 的结构图:
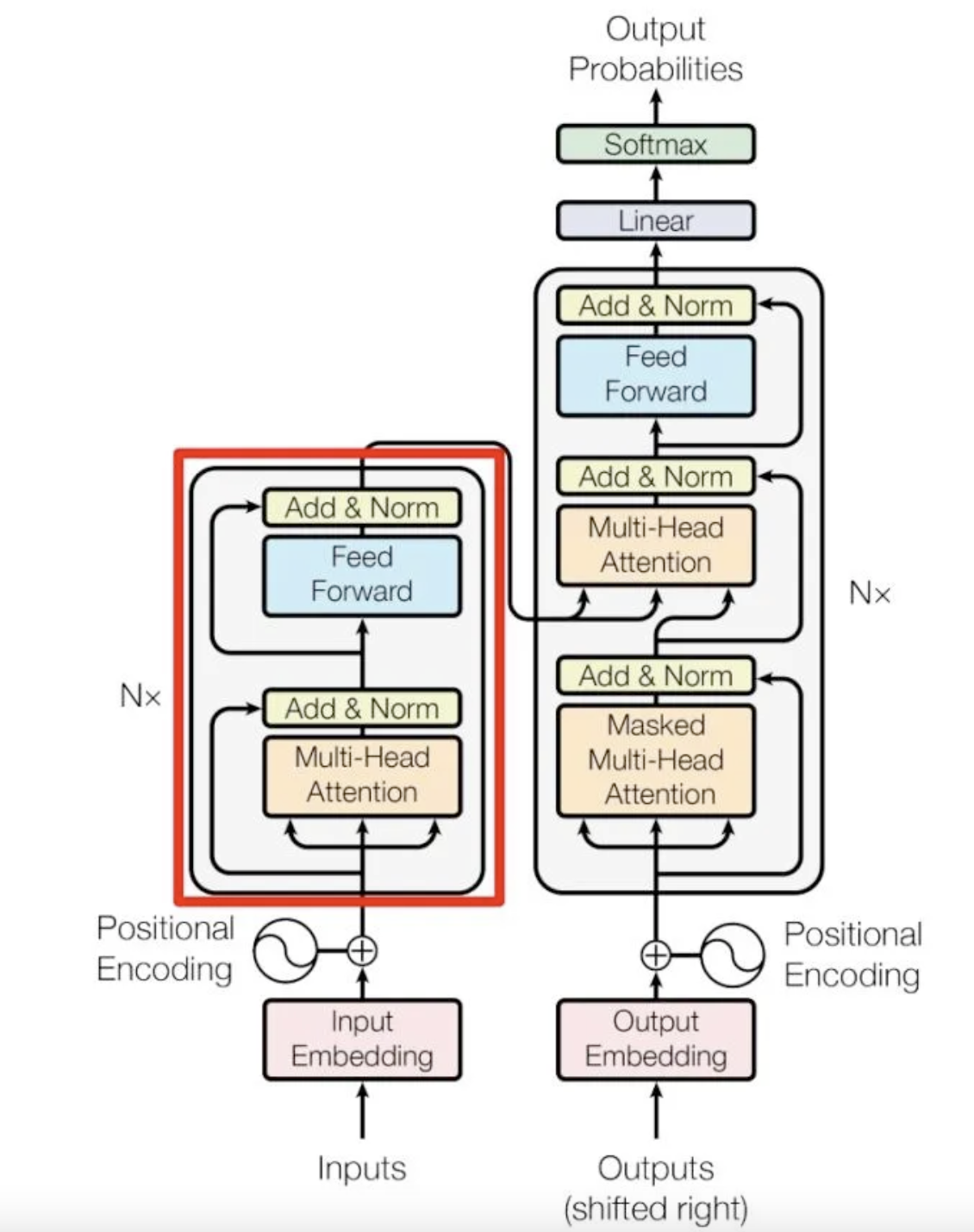
在 MultiHeadAttention 的后面接了一个 Add & Norm,这里的 Add 其实就是残差,Norm 就是 LayerNorm。所以 Encoder 部分的两个 Add & Norm 可以总结为:

add_bias_input_layernorm
对于 softmax 和 layernorm 我还没看 FasterTransformer 的源码,后续研究了之后再分享。
总的来说就是 add_bias_input_layernorm 这个优化把残差连接和LayerNorm fuse到一起了,性能更好并且降低了kernel launch的开销。
add_bias_act
在上图的 Feed Forward 的实现中,还有一个 bias_add 和 gelu 激活函数挨着的 pattern ,所以 FasterTransformer 实现了这个 add_bias_act kernel 将两个操作融合起来,常规操作。
-
请问encoder的数据是记录在PLC中还是记录在encoder中?2023-12-29 0
-
怎样查询在FFMPEG中的encoder信息?2023-09-19 0
-
GPRS优化思路总结报告2009-07-27 346
-
ENCODER/DECODER 4 种不同状态2010-04-22 954
-
DSP程序优化总结2017-10-23 442
-
DC-DC电源系统的优化设计总结2021-09-22 616
-
鼠标滚轮/编码器检测- wheel/encoder detect for mouse2021-12-08 566
-
Voice_Encoder用户手册2022-06-16 188
-
ASTC Encoder ASTC格式编码器2022-06-17 571
-
NVIDIA FasterTransformer库的概述及好处2022-08-31 1204
-
Gowin MJPEG Encoder IP用户指南2022-09-15 322
-
总结FasterTransformer Encoder(BERT)的cuda相关优化技巧2023-01-30 1394
-
FasterTransformer GPT介绍2023-02-07 2082
-
STM32 Encoder编码器使用总结2023-05-06 311
全部0条评论

快来发表一下你的评论吧 !
