

基于51单片机设计的公交车LED屏
描述
一、项目介绍
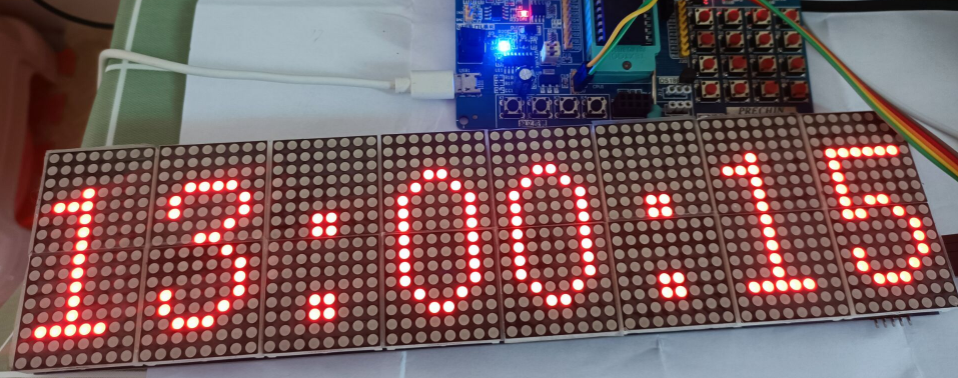
为了提高公交车站点信息的实时性和准确性,方便乘客及时了解公交车到站信息,从而提高公交出行的便利性和舒适度。传统的公交车到站信息是通过人工喊话或者静态的站牌来实现的,这种方式存在信息不及时、不准确、不方便等问题。当前设计基于STC89C52单片机和MAX7219点阵LED驱动模块的公交车LED屏,通过SYN6288进行语音播报到站信息,可以更加准确地展示到站信息,提高公交出行的效率和便利性。
通过STC89C52单片机控制MAX7219点阵LED驱动模块,将需要显示的信息转化成点阵图像,然后通过MAX7219点阵LED驱动模块控制2*8的LED显示屏显示出来。同时,通过SYN6288语音模块,将到站信息转化成语音播报出来,方便乘客听取。这样,乘客不仅可以看到到站信息,还可以听到语音播报,提高了信息的实时性和准确性,方便乘客及时了解公交车的到站信息。
二、设计思路
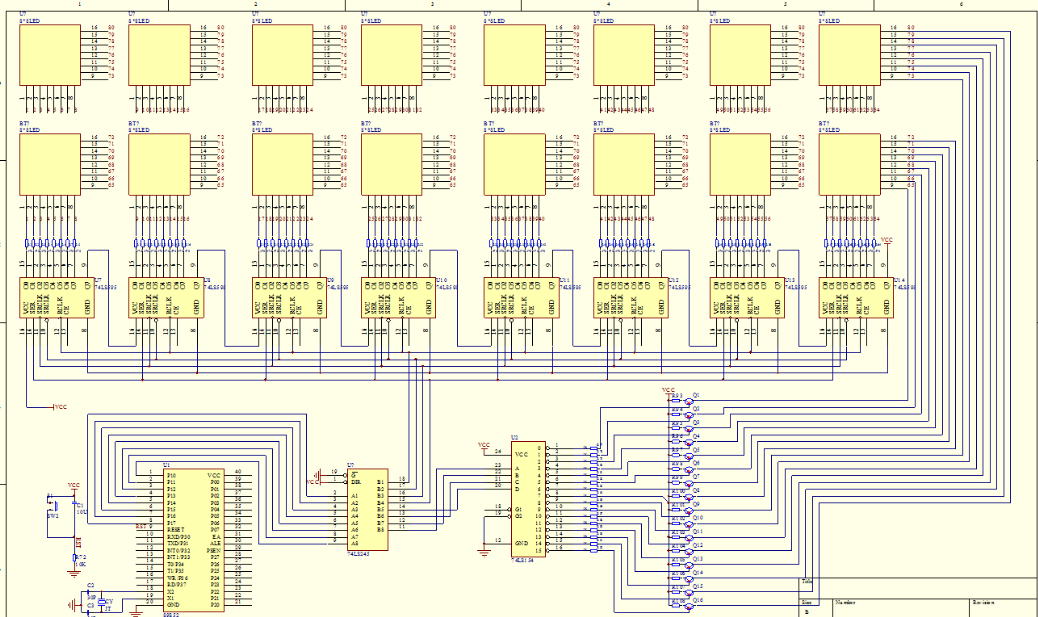
2.1 硬件设计
本设计采用STC89C52单片机作为主控芯片,MAX7219点阵LED驱动模块控制2*8的LED显示屏,SYN6288语音模块进行语音播报。
具体硬件设计:
(1)STC89C52单片机
STC89C52单片机是一种高性能、低功耗的8位单片机,具有丰富的外设资源,支持ISP下载和在线仿真调试,适合于各种应用场合。
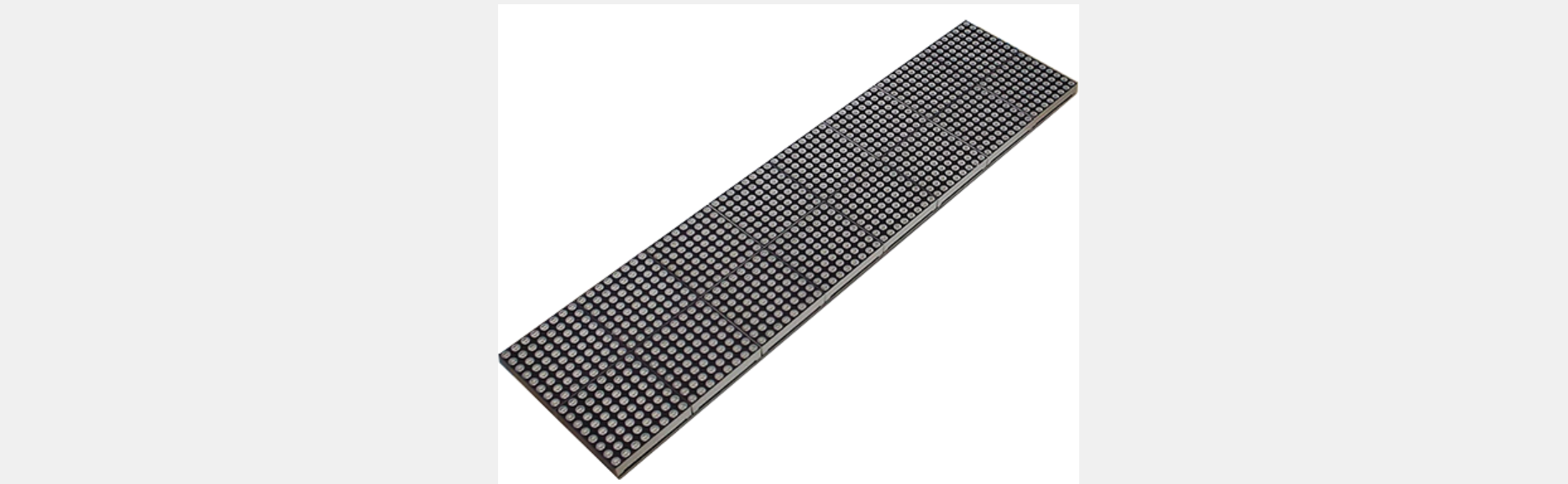
(2)MAX7219点阵LED驱动模块
MAX7219是一种集成电路,可以驱动8×8点阵LED显示屏,具有串行输入、并行输出的特点,可以方便地控制多个LED显示屏。本设计采用MAX7219点阵LED驱动模块控制2*8的LED显示屏,实现公交车站点信息的展示。
(3)SYN6288语音模块
SYN6288是一种语音合成芯片,可以将文字转换成语音输出。本设计采用SYN6288语音模块进行语音播报,实现公交车到站信息的语音提示。
2.2 软件设计
本设计采用Keil C51编译器进行软件开发,具体软件设计如下:
(1)LED显示屏控制程序
LED显示屏控制程序主要实现MAX7219点阵LED驱动模块控制2*8的LED显示屏,显示公交车站点信息。
具体实现过程:
① 初始化MAX7219点阵LED驱动模块,设置显示模式、扫描限制、亮度等参数。
② 将需要显示的信息转换成点阵数据,存储在数组中。
③ 将点阵数据通过SPI总线发送给MAX7219点阵LED驱动模块,实现LED显示屏的显示。
(2)语音播报程序
语音播报程序主要实现SYN6288语音模块进行语音播报,实现公交车到站信息的语音提示。
具体实现过程:
① 初始化SYN6288语音模块,设置波特率、语音速度、音量等参数。
② 将需要播报的信息转换成语音数据,存储在数组中。
③ 将语音数据通过串口发送给SYN6288语音模块,实现语音播报。
2.3 设计实现
本设计采用STC89C52单片机作为主控芯片,MAX7219点阵LED驱动模块控制2*8的LED显示屏,SYN6288语音模块进行语音播报。
代码设计思路:
(1)LED显示屏控制程序
① 初始化MAX7219点阵LED驱动模块
void Init_MAX7219(void)
{
Send_Max7219(0x09, 0x00); // 译码方式:BCD码
Send_Max7219(0x0a, 0x03); // 亮度
Send_Max7219(0x0b, 0x07); // 扫描界限:8个数码管
Send_Max7219(0x0c, 0x01); // 关闭显示测试
Send_Max7219(0x0f, 0x00); // 正常工作模式
}
② 将需要显示的信息转换成点阵数据,存储在数组中
unsigned char code LED_Data[16][8] = {
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff}, // 全部亮
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, // 空
{0x00,0x00,0x00