

基于IC555的伺服电机驱动电路
控制/MCU
1814人已加入
描述
伺服电机用于各种应用,如机器人、工业、计算机、门、玩具等等。但与通用直流电机不同,我们可以控制伺服电机的角度。这提供了使用此电机的更精确的运动。但是伺服需要特殊的电路才能运行。这就是上述伺服电机驱动器电路发挥作用的地方,该电路使用IC555来执行这项工作。通读本教程以更好地了解伺服电机及其工作原理。
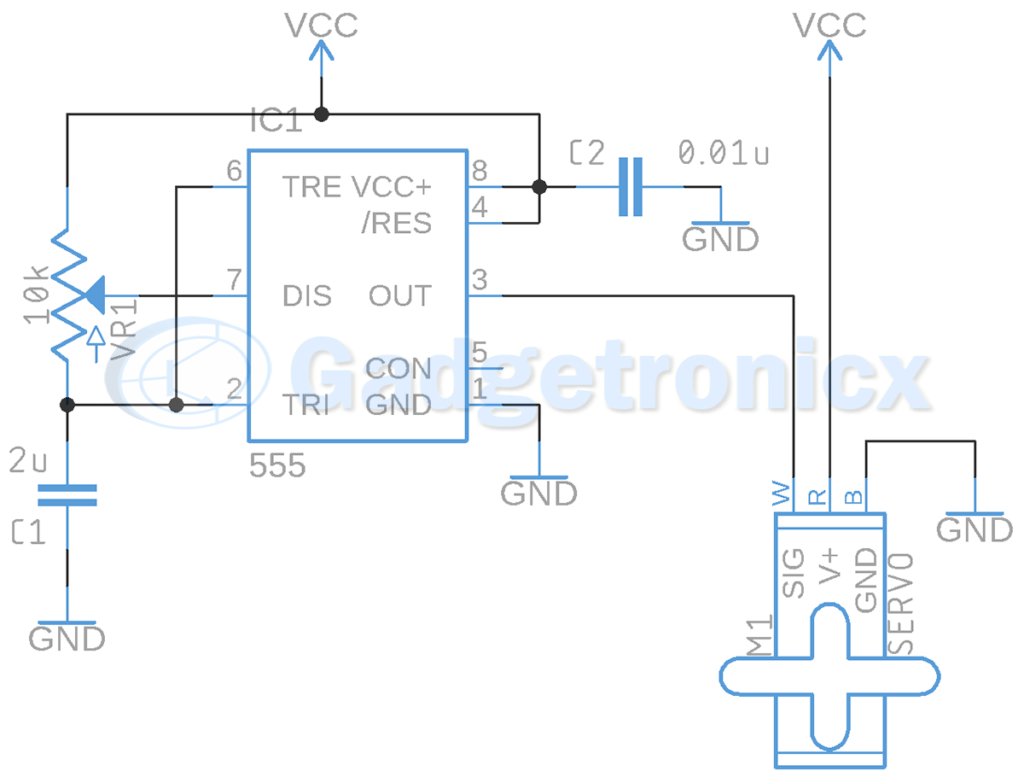
使用的零件:
电池 6V
定时器 555
电位计 10kOhm – 1
电容器 2uF – 1
电容器 0.01uF – 1
伺服电机驱动电路的工作原理:
伺服电机只不过是一种直流电机,可以通过控制信号调整其位置。在这里,我们需要将GND和电压电源连接到电机,并构建一个电子电路来向其馈送控制信号。这使我们能够控制电机。为此,伺服电机使用PWM信号来调整其位置,因此我们使用配置为非稳态多谐振荡器的555定时器。在此非稳态配置中,我们使用电位计生成20ms时间段的PWM信号。
我们选择电位计为10k欧姆。如果我们将电位计设置为最大10kOhm,则意味着我们将需要一个2uF电容器,因此我们现在可以调整PWM的占空比。这控制伺服电机的位置,因为伺服读取大约
20ms 的 PWM
信号的占空比以调整其位置。PWM信号的导通时间的时间段决定了伺服器旋转的角度。因此,电位器值的变化将改变输出信号的ON时间段,从而改变旋转角度(45或90或180)。
注意:
输出信号的时间段需要达到伺服旋转点。
校准 POT 以达到近似导通时间可能需要一些时间。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于IC555和IC4026的访客计数器电路2023-03-19 907
-
基于IC555设计的双音门铃电路2023-03-19 3517
-
基于IC555自动闭帘电路2023-04-08 543
-
如何使用IC555控制伺服电机的方向2023-06-18 474
-
基于iC555的基本方波振荡器电路2023-06-18 1603
-
如何调制IC555振荡器2023-06-18 596
-
基于IC555的金属探测器电路2023-06-29 1554
-
使用IC555电路构建雾化器2023-06-30 620
-
基于IC555的顺序过程控制电路2023-07-02 961
-
基于IC555的备用开关LED电路2023-07-03 374
-
深度剖析IC555的工作原理2023-07-05 2180
-
基于IC555和CD4033的计数器显示电路2023-07-05 556
-
基于IC555的自动晚灯电路2024-02-25 230
-
基于IC555构建的音频放大器电路2024-02-25 277
-
基于IC555的伺服电机测试电路2024-02-25 734
全部0条评论

快来发表一下你的评论吧 !
