

自适应滤波-LMS算法的FPGA实现
可编程逻辑
描述
其实所有的数字滤波器都逃不过延时加权求和的六字真谛,但我们之前讨论的FIR滤波器,其截止频率等参数都是事先已经定好;如果事先已知有用信号与噪声信号的频率相差较远,用这种滤波器是可以完成滤波的。
但如果噪声与有用信号频率相差不大或者噪声近似高斯白噪声呢,这个情况该如何面对?这意味着滤波器参数不能再保持固定不变,也就意味着加权系数不能是定值,而是应该根据信号的某些统计特性改变。
维纳滤波器就是这样一种自适应滤波器,根据维纳霍夫方程可以求得维纳滤波器的加权系数。但是,维纳滤波器有其本身的局限性,在求解加权系数时,需要知道期望信号与输入信号的互相关函数,输入信号的自相关函数。这导致计算过程设计到矩阵运算,并且滤波器不适合非平稳信号,非平稳信号的相关性不是仅仅跟时间有关。
为了简化计算量,LMS不通过求均方误差的数学期望最小去获得最佳权值,而是直接对均方误差求最小值获得权值,然后不断地重复这个过程,直到接近最优维纳解。
维纳的权值更新方程:
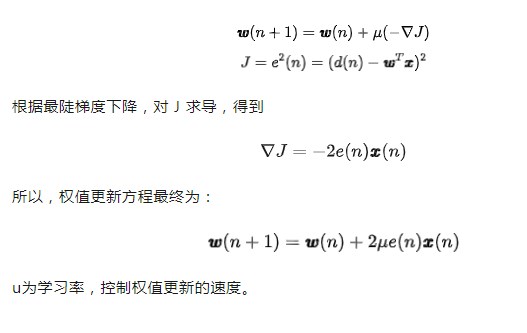
所以,LMS算法相比于前面讲过的FIR滤波器,不仅要对输入信号进行加权求和,还要求滤波器输出信号与期望信号的差值,然后根据差值更新权值信息。
LMS算法的FPGA实现结构里,我们依然使用FIR的基础模块,基础模块实现加权和权值更新,然后通过generate for调用基础模块,对所有结果求和;顶层求误差;
示例中使用的输入信号为带噪信号,期望信号是带噪的语音信号。
base_generator.v 基础模块实现过程,当时使用的是Altera的芯片,所以设置了如果FPGA_FAMILY为“ALTERA”,会调用Altera的乘法器IP核进行权值增量的计算和加权计算过程。
wire signed [X_W+E_W-1:0] coef_tmp ; // xin * err
reg signed [X_W+E_W:0] coef_nxt ; // wout(k+1)
reg signed [X_W+E_W-1:0] coef ; // wout(k)
reg signed [X_W-1:0] x_r ; // Save xin value for later calculation
reg signed [E_W-1:0] e_r ; // Save err value for later calculation
reg [2:0] state ;
//因为调用了Altera的IP核,不使用Altera就用*代替
generate if (FPGA_FAMILY == "ALTERA")
begin
mult16 m1(
.dataa (x_r),
.datab (e_r),
.result (coef_tmp)
);
mult16 m2(
.dataa (x_r),
.datab (wout),
.result (yout)
);
end
else
begin
assign coef_tmp = x_r * e_r;
assign yout = x_r * wout;
end
endgenerate
always @ (posedge clk or negedge rst_n)
begin
if (!rst_n)
begin
state <= 'd0;
coef_nxt <= 'd0;
coef <= 'd0;
wout <= 'd0;
update <= 'd0;
x_r <= 'd0;
e_r <= 'd0;
end
else
case (state)
3'd0:
begin
if (en)
begin
state <= 3'd1;
x_r <= xin ;
e_r <= err ;
end
update <= 1'b0;
end
3'd1:
begin
coef_nxt <= coef_tmp + coef;
coef <= coef_nxt[X_W-1+E_W:0];
wout <= coef_nxt[X_W-1+E_W-:W_W];
state <= 3'd0;
update <= 1'b1;
end
default: state <= 3'd0;
endcase
end
always块里面,首先保存输入信号和误差信号,然后进行加权结果输出,权值更新。
lms16_order.v中间模块部分代码,首先使用generate for调用了基础模块,然后对计算输出结果进行了扩位;这里没有使用Shift-RAM代替输入信号的延迟数组,也没有在求和过程使用流水线;这两个地方其实是需要改进的。
genvar i;
generate for (i = 1; i < 16; i = i + 1) begin:order
base_generator
#(
.FPGA_FAMILY(FPGA_FAMILY),
.X_W(X_W ) ,
.E_W(E_W ) ,
.W_W(W_W )
)
bg_inst
(
.clk (clk),
.rst_n (rst_n),
.en (en),
.xin (xin_arr[i-1]),
.err (err),
.yout (yout_arr[i]),
.wout (wout[(((i+1)*W_W)-1)-:W_W]),
.update (b_update[i])
);
assign yout_exp[i] = {{4{yout_arr[i][X_W+W_W-1]}}, yout_arr[i]};
end
endgenerate
always @ (posedge clk or negedge rst_n)
begin
if (!rst_n)
begin
en <= 1'b0;
state <= 3'd0;
yout_ori<= 'd0;
update <= 1'b0;
end
else
case (state)
3'd0:
begin
if (en_i)
begin
en <= 1'b1;
state <= 3'd1;
end
update<= 1'b0;
end
3'd1:
begin
en <= 1'b0;
if (b_update == 16'hffff)
begin
yout_ori <= yout_exp[0] + yout_exp[1] + yout_exp[2] + yout_exp[3] + yout_exp[4] + yout_exp[5] + yout_exp[6] + yout_exp[7] +
yout_exp[8] + yout_exp[9] + yout_exp[10] + yout_exp[11] + yout_exp[12] + yout_exp[13] + yout_exp[14] + yout_exp[15];
state <= 3'd0;
update<= 1'b1;
end
end
default: state <= 3'd0;
endcase
end
lms.v顶层实现部分代码,对滤波器求和结果与期望信号求误差信号,这里,u值采取了截位填充符号位的做法,信号右移N位,同时最高位填入N位符号位,误差数据相当于除以2的N次方
lms16_order
#(
.FPGA_FAMILY(FPGA_FAMILY),
.X_W(X_W ) ,
.E_W(E_W ) ,
.W_W(W_W ) ,
.Y_W(D_W )
)
l_inst
(
.clk (clk) ,
.rst_n (rst_n) ,
.en_i (en_i) ,
.xin (xin) ,
.err (err_tmp),
.update (lms_up),
.xnxt () ,
.wout (wout) ,
.yout (lms_yout)
);
always @ (posedge clk or negedge rst_n)
begin
if (!rst_n)
begin
update <= 1'b0;
err <= 'd0;
d_r <= 'd0;
end
else if (lms_up)
begin
update <= 1'b1;
err <= d_r - lms_yout;
d_r <= din;
end
else
begin
update <= 1'b0;
end
end
always @ (*)
case (u)
8'd0: err_tmp <= err;
8'd1: err_tmp <= {err[E_W-1],err[E_W-1:1]};
8'd2: err_tmp <= {{2{err[E_W-1]}},err[E_W-1:2]};
8'd3: err_tmp <= {{3{err[E_W-1]}},err[E_W-1:3]};
8'd4: err_tmp <= {{4{err[E_W-1]}},err[E_W-1:4]};
8'd5: err_tmp <= {{5{err[E_W-1]}},err[E_W-1:5]};
8'd6: err_tmp <= {{6{err[E_W-1]}},err[E_W-1:6]};
8'd7: err_tmp <= {{7{err[E_W-1]}},err[E_W-1:7]};
8'd8: err_tmp <= {{8{err[E_W-1]}},err[E_W-1:8]};
8'd9: err_tmp <= {{9{err[E_W-1]}},err[E_W-1:9]};
8'd10: err_tmp <= {{10{err[E_W-1]}},err[E_W-1:10]};
8'd11: err_tmp <= {{11{err[E_W-1]}},err[E_W-1:11]};
8'd12: err_tmp <= {{12{err[E_W-1]}},err[E_W-1:12]};
8'd13: err_tmp <= {{13{err[E_W-1]}},err[E_W-1:13]};
8'd14: err_tmp <= {{14{err[E_W-1]}},err[E_W-1:14]};
8'd15: err_tmp <= {{15{err[E_W-1]}},err[E_W-1:15]};
default: err_tmp<= err ;
endcase